1.本发明属于质子治疗系统技术领域,尤其涉及一种质子束能量选择控制系统。
背景技术:
2.质子放疗装置中,若要将质子回旋加速器应用于临床,必须采用能量质子选择控制系统按照肿瘤的不同深度和厚度来对引出质子束能量进行调节。所述的质子束能量选择控制系统包括:从束流线起始点(束流从加速器引出口引出,经过一组四级磁铁和导向磁铁后)到目标点(与治疗头相连接的旋转机架)沿途布设的降能器、多个磁铁、多个四扇准直器、动量选择狭缝、能量选择狭缝、以及运动板卡、系统板卡等。
3.现有技术实现质子能量选择控制系统的难点之一在于:指令下发给束流线各个设备的通信耗时长、影响设备之间响应的同步性,而临床上要求每一档的能量变化响应时间只有80毫秒。所述指令下发给各设备的通信耗时长、影响各设备之间响应的同步性的原因是:第一,束流线能量的控制是对整条束流线的能量控制,整条束流线的能量控制需要在束流线起点到终点分布几十个甚至上百个设备,非常苛刻的要求在于:不论束流线上的设备数量有多庞大,只有所有设备都在规定的时间内完成执行指定动作的动态过程,才能保证整条束流线在规定的时间内完成降能;第二、目前质子治疗系统对束流线设备的控制是一种并行命令的方式,但从微观上看,对于发送控制指令这一步骤仍是串行命令,且任务切换时间长:例如下位机采用vxworks实时操作系统代替linux操作系统,因为vxworks和其他系统(例如linux)相比,vxworks每个任务切换的时间更短,但vxworks对于多任务的初始化进程的启动仍然是首尾相接的异步启动方式,所述首尾相接的异步启动方式既是上一个任务的初始化进程完毕才能开始下一个任务的初始化进程,如果对于束流线上的多个设备发送命令就需要一个一个地发送命令。当需控制的束流线设备数量较多时,在通信过程中的耗时就大大增加,通信耗时叠加在动态响应时间上,使动态响应速度变慢。同时,收到命令的第一个设备和最后一个设备之间存在较长时间间隔,导致设备之间响应不同步。
4.现有技术实现质子能量选择控制系统的难点之二在于:现有技术的降能器不能同时兼顾响应速度快和避免束流能量损失的需求。第一种多楔形降能器,虽然降能速度上能够满足要求,但其束流的能量损失大:由于多楔形降能器是采用多个体积相对小(宽度、长度相对小)的对楔形降能器并排组合,通过其长度相对小或所走的路程相对短的特点实现快速响应,又通过并排组合达到降能器厚度要求,降能器厚度满足要求才能达到降能的最大范围,但因为是多个对楔形降能器并排组合,其中有多个空气间隙,束流每经过一个空气间隙就发生一次能量损失,当经过多组对楔形降能器时就发生多次能量损失。现有技术的另外一种为双楔翼形铍降能器,该双楔翼型铍降能器虽然减小了多楔形降能器束流损失问题,但铍材料有毒,且生成的中子量较大,给辐射防护增加了难度,并且该双楔翼形铍降能器虽然由多个双楔翼形改造为一个双楔翼形,减小了能量损失问题,但是由于总的体积加大,在用一个双楔翼形代替多个双楔翼形的同时,不仅厚度增加而且长度或者走过的路程也增加为原来的几倍。由于长度或走过的路程增加几倍,导致响应时间也慢了几倍,由于降
能器处于质子束能量选择控制系统上的第一个设备,如果第一个设备响应时间延迟,并且质子治疗系统对束流线设备的控制是一种串行命令的方式,则整条束流线的延迟时间就会更加严重。
5.
技术实现要素:
6.本发明针对现有技术的不足,提出一种质子束能量选择系统,目的在于解决现有技术指令下发给束流线各个设备的通信耗时长、导致影响设备之间响应的同步性的问题,以及解决现有技术的对楔形降能器由于体积增大,使得其长度或走过的路程相比多楔形降能器增加几倍,导致降能器响应时间变慢了很多的问题。
7.本发明为解决现有技术存在的问题,提出以下技术方案:一种质子束能量选择控制系统,包括系统板卡、运动板卡、降能器、多个四扇准直器、多个磁铁(包括四级磁铁、导向磁铁和偏转磁铁);所述系统板卡其输入端连接治疗头、从治疗头获取当前治疗所需要的束流能量信息,其输出端分别连接运动板卡和磁铁电源,将降能器步进电机和四扇准直器步进电机的动作命令发送给运动板卡,将磁铁电源参数发送给磁铁电源;所述运动板卡其输入端连接系统板卡、输出端连接降能器和四扇准直器;所述降能器和四扇准直器分别包括降能器组件、降能器步进电机驱动器和降能器步进电机、四扇准直器组件、四扇准直器步进电机驱动器和四扇准直器步进电机,所述降能器组件和四扇准直器组件,它们的输入端分别为降能器步进电机和四扇准直器步进电机,在降能器步进电机和四扇准直器步进电机的控制下运动;所述降能器步进电机驱动器和四扇准直器步进电机驱动器,它们输入端分别连接运动板卡,输出端连接各自的步进电机;所述磁铁包括布设在当前束流线上的多个磁铁和每个磁铁内的磁铁电源,该每个磁铁内的磁铁电源的输入端分别连接系统板卡并从系统板卡获取对应当前治疗头能量的磁铁电源参数,输出端连接对应的磁铁并控制磁铁磁场,(包括能量选择狭缝和动量选择狭缝)其特点是:所述系统板卡内安装了vxworks嵌入式实时控制系统,vxworks嵌入式实时控制系统使得每个任务的切换时间更短、能够及时得到外界设备的反馈;所述系统板卡和治疗头之间为dds通讯,节省了通讯双方握手的时间;所述系统板卡包括多任务调度单元、以及查表单元;该多任务调度单元设有同步运动指令传送模块,当多个任务的初始化进程以首尾连接的异步方式启动时,该同步运动指令传送模块通过指令传送的方式,使得异步方式启动的多任务模块在同一时刻接收到调度指令;所述能量选择控制系统控制降能器每一档的降能响应时间快于多楔形降能器的响应时间、能够在50毫秒内完成能量切换;所述对楔形降能器包括一对带有倾角的楔形石墨降能片,该一对带有倾角的楔形石墨降能片的长度或所走的路程是多楔形降能片的长度或多楔形降能片所走的路程的数倍,宽度与多楔形降能片的宽度总和相同。
8.进一步地,所述查表模块设有降能器查表子模块、四扇准直器查表子模块、磁铁电源查表子模块;这些子模块各自根据系统板卡获取的治疗头束流能量值进行查表,从而获得降能器步进电机需要运动的步数、四扇准直器步进电机需要运动的步数、磁铁电源需要调节的参数并各自发送给多任务调度模块。
9.进一步地,所述多任务调度单元设有降能器任务模块、四扇准直器任务模块、磁铁电源任务模块、同步运动指令传送模块;所述的降能器任务模块、四扇准直器任务模块、磁铁电源任务模块分别包括执行初始化任务子模块、等待同步运动指令子模块、接收同步运动指令子模块;所述等待同步运动指令子模块判断当前初始化任务完成以后将各自当前的任务挂起,直至接收到同步运动指令;所述接收同步运动指令子模块接收到同步运动指令以后,降能器任务模块向运动控制卡发送指令,四扇准直器任务模块向运动控制卡发送指令,磁铁电源任务模块向运动控制卡发送指令。
10.进一步地,所述同步运动指令传送模块设有等待挂起子模块、传送同步指令子模块;所述等待挂起子模块等待最后一个任务挂起后通知所述传送同步指令子模块,所述传送同步指令子模块接到通知后向降能器任务模块、四扇准直器任务模块、磁铁电源任务模块发送同步运动指令。
11.进一步地,所述降能器任务模块、四扇准直器任务模块的初始化任务子模块包括调用s曲线算法模块,所述调用s曲线算法模块包括设置s曲线参数子模块,所述设置s曲线参数子模块包括设置四个加速度参数、以及四个减速度参数;磁铁电源任务模块的初始化包括通过建立udp连接的方式建立磁铁电源与系统板卡之间的网络通信。
12.进一步地,所述对楔形降能器,包括对楔形降能片、入射准直器、出射准直器、电子尺、步进电机、步进电机驱动器、支撑台架;所述对楔形降能片竖直方向带有一定倾斜角度地安装在支撑台架上,该对楔形降能片由一对带有倾角的楔形石墨降能片通过万向轴和丝杆连接而成、并且对楔形石墨降能片之间留有缝隙,束流沿着垂直于该缝隙的方向穿过;所述入射准直器和出射准直器沿着束流方向布设在所述对楔形降能片两侧的支撑台架上,其高度为束流线中心点的高度;所述电子尺布设在支撑台架的对楔形降能片的一侧,随着对楔形降能片的移动,读取和显示对楔形降能片的位移;所述步进电机通过十字滑块联轴器和右旋滚珠丝杆连接对楔形降能片、带动对楔形降能片做增加对楔形降能片厚度或减少楔形降能片厚度的位移;所述步进电机驱动器输入端连接运动板卡、输出端连接步进电机;所述万向轴和丝杆包括右旋滚珠丝杆和左旋滚珠丝杆,中间为万向轴。
13.进一步地,所述一对带有倾角的楔形石墨降能片,每块楔形石墨降能片其倾角为12
°
,其厚度为40mm,顶角宽度1mm,低边宽度为100mm,长度500mm;该对楔形降能器相对运动过程中的最大宽度为200 mm,最小宽度为6mm。
14.进一步地,所述对楔形降能片每一档的降能响应时间快于多楔形降能片的响应时间,具体为:每次能量切换时间为50ms以内,相比多楔形片每一档的降能时间快1.2倍以上。
15.进一步地,所述降能器驱动器和步进电机驱动器,分别设有外接运动板卡的接口,通过该接口从运动板卡获得能够确保每次能量切换时间为50ms以内的相关步进电机的运动信息,该运动信息包括确保50毫秒相应时间的运动步数、运动速度、运动加速度。
16.进一步地,所述对楔形降能片包括右降能片和左降能片;右降能片连接于右丝杆螺母上、右丝杆螺母连接右旋滚珠丝杆;左降能片连接于左丝杆螺母上、左丝杆螺母连接左旋滚珠丝杆,所述步进电机连接十字滑块联轴器、再通过十字滑块联轴器连接右旋滚珠丝杆转动,通过右旋滚珠丝杆带动万向轴、进而带动左旋滚珠丝杆转动、左旋滚珠丝杆通过左丝杆螺母带动左降能片运动,从而实现步进电机带动左降能片和右降能片做相向运动或相背运动。
17.本发明的优点效果1、本发明提供一种质子束能量选择控制系统,使得束流能量能够在70-240mev之间连续可调,并且能够在50ms内迅速完成相邻的束流能量调节过程,解决了质子治疗快速点扫描以及治疗移动靶区时用的体积重复扫描问题。
18.2、本发明充分利用vxworks嵌入式实时控制系统实时性强、各个任务的切换时间更短的优势,同时又通过本发明多任务调度算法弥补该系统只能在每个任务进程结束时发送指令、导致指令下发给束流线各个设备的通信耗时长、影响设备之间响应的同步性的缺陷。本发明通过多任务调度单元在每个任务模块都增加了挂起和等待的功能,实现了即使当前进程结束也不会接收指令,为多任务同步接收指令奠定了基础;同时,多任务调度单元还增加了同步任务指令传送模块,该模块等待最后一个任务挂起后才将任务指令通知所有多任务模块,由此实现了束流线多任务同步接收指令,解决了现有技术指令下发给束流线各个设备的通信耗时长、导致影响设备之间响应的同步性的问题。
19.3、本发明通过将降能器步进电机驱动器与运动板卡相连接、运动板卡与系统板卡相连接、系统板卡内安装vxworks嵌入式实时控制系统、系统板卡和治疗头进行dds通讯连接、系统板卡设置降能器任务模块、降能器任务模块设置初始化调用子模块、初始化调用子模块调用s曲线算法模块,再通过设置s曲线算法模块的四个加速度参数、以及四个减速度参数、运动参数,将这些参数通过运动板卡传送给降能器驱动器、再通过降能器驱动器控制降能器步进电机,最终实现了降能器50毫秒的能量换挡时间,虽然本发明的对楔形降能器的长度或走过的路程是多楔形降能器的5倍,但能量响应时间50毫秒比多楔形降能器的60毫秒快1.2倍,并且由于采用一对楔形降能器代替传统的多对楔形降能器,彻底解决了束流在穿过多对楔形降能器产生的束流散射问题。
20.4、本发明将dds通讯、vxworks嵌入式实时控制系统、调用s曲线算法模块三者有机结合,解决了现有技术的对楔形降能器由于体积增大,使得其长度或走过的路程相比多楔形降能器增加几倍、导致降能器响应时间变慢了很多的问题。采用dds通讯,节省了通讯双方需要握手的时间;采用vxworks嵌入式实时控制系统,使得每个任务的切换时间更短、能够及时得到外界设备的反馈;调用s算法模块,解除了大体积对楔形降能器进行50毫秒快速切换时,步进电机由于提高速度、设备惯性大容易损坏设备的后顾之忧。
21.附图说明
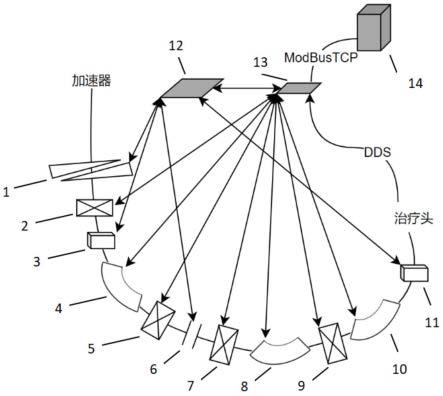
22.图1 为本发明质子束能量选择控制系统网络拓扑图;图2为本发明质子束能量选择控制系统功能架构;图3 为本发明查表单元示意图;图4 为本发明多任务调度单元示意图;图5-1 为本发明多任务调度流程图;图5-2 为本发明多任务调度原理;图6 为s曲线算法下步进电机的运动速度变化示意图;图6中,0-t1时间段,步进电机做变加速运动,加速度先递增再递减;t1-t2时间段,以v0速度匀速运动;t2-t3时间段,步进电机做变减速运动,减速度递增再递减。
23.图7-1为本发明降能器结构示意图;图7-2 为本发明降能器左旋滚珠丝杆和右旋滚珠丝杆通过万向轴连接示意图;图中:1:降能器,1-1:左降能片;1-2:右降能片;1-3:入射准直器;1-4:出射准直器;1-5:直线位移传感器;1-6:指针及滑块;1-7:刻度尺;1-8、1-9:滑轨;1-10:左旋滚珠丝杆;1-11:右旋滚珠丝杆;1-12:万向轴;1-13、1-14:限位开关;1-15为限位开关触头;1-16:十字滑块联轴器;1-17:步进电机;1-18、1-19:支撑台架;1-20:步进电机驱动器; 2、4、5、7、8、9、10:磁铁;3、11:四扇准直器;6:动量选择狭缝;12:运动板卡;13:系统板卡;14为上位机。
24.具体实施方式
25.本发明设计原理:1、本发明设计目标和解决的问题:设计目标:控制束流线从起点到终点沿途各个设备的能量切换总共时间为80毫秒。解决的问题:解决两个技术瓶颈问题,这二个问题必须同步解决才能真正达到80毫秒的能量切换时间要求。一个问题是指令下发给束流线各个设备的通信耗时长、影响设备之间响应同步性问题;另一个问题是采用对楔形降能器代替多楔形降能器,由于体积增大,使得对楔形降能器其长度或走过的路程相比多楔形降能器增加几倍、导致降能器响应时间变慢了很多的问题。如果只是解决其中一个问题如通讯时长问题而不解决对楔形降能器行走路程相对长且响应时间相对慢的问题,则降能器的延迟时间同样会影响80毫秒的能量切换效果;如果只是解决了降能器的时间延迟问题而不能解决通讯时长问题,则降能器即使达到了50毫秒的切换时间但因为束流线其他设备的通讯延迟问题不解决,整条束流线的能量切换响应时间同样会达不到80毫秒的设计要求。
26.2、多任务调度的设计原理。传统方法的多任务调度一般采取多任务异步发送指令的方法,所述多任务异步发送指令就是调度系统在每个任务进程的最后时刻发送指令,由于每个任务进程的时间长短不同,如果只是在进程末端发送指令,就会造成最先接到指令和最后接到指令的任务结束任务的时刻不等,最先接到指令的任务可能会先完成任务,最后接到指令的任务可能会最后完成任务,这样,总的完成任务的时间就会拉长。本发明为解决这个问题,在多任务调度单元中做了两项改进,第一、多任务调度单元的每个任务模块都增加了挂起和等待的功能,当各自的初始化进程完成后就将任务挂起并等待,由于是任务挂起状态,即使当前进程结束也不会接收指令,这就为同步接收指令奠定了基础;第二、多任务调度单元增加了同步任务指令传送模块,该模块等待最后一个任务挂起后才将任务指令通知所有多任务模块。由此实现了束流线多任务同步接收指令。
27.说明:所述同步接收指令是指宏观上的同步、微观上的串行,虽然同步任务指令传送模块等待最后一个任务挂起后才将任务指令通知所有多任务模块,但实际接收命令时也是按照图5-2的优先级排队接收,但是这个时间很短暂可以忽略不计,因为只是同一个起跑线上的不同队员先后接到命令,由于是在同一个起跑线上,既是接到命令的时间有差异,该差异也微乎其微。这一点和传统方法的区别在于:传统方法是在每个任务进程的最后时刻发送指令,就如同在不同起跑线上的人又在不同的终点接到命令,因此不同起跑线上的所有人的从起点到终点的时间加一起就会拉长。
28.3、降能器设计原理。1)对楔形降能器设计难点。设计难点在于如何解决急走急停的问题。急走急停的危险性在于:当设备惯性大的时候容易损坏设备。所述急走急停是指步进电机加速和减速时的陡度很大,本发明需要通过提高电机的速度来弥补路程长造成的能量切换时间延迟问题,但提高速度的同时如果处理不好就会出现急走急停造成设备损坏的危险。而传统的多楔形降能器不涉及急走急停的问题,因为其体积就小,体积小重量轻,运动起来惯量就小,本发明对楔形降能器的长度是多楔形降能器的5倍,重量大则惯性就大。为了保证降能器步进电机的速度达到设定要求,同时又避免出现急走急停的隐患,本发明采取调用s曲线的方法,和传统方法对比,传统方法是采用的是梯形曲线加速度直线上升和减速度直线下降的方法,其上升或下降过程中没有平滑过渡,s曲线的优势在于中间段也就t1到t2之间的速度可以足够高,但是两侧的曲线尽量平滑。调用s曲线,可以保证步进电机在均速运动阶段达到设定的最高速度,同时使得电机平滑地从最低点到达最高点,以及从最高点回到最低点,以此解决急走急停的问题。2)本发明对楔形降能器解决方案:由于降能器能量换挡时间总共只有50毫秒,所以不能只是从一个环节上想办法而必须每个环节都要节省时间,各个环节之间相互支持、共同作用才能最终实现50毫秒的切换时间,本发明从通讯层、系统层、调度层三个方面解决快速响应的问题;第一、通讯层采用dds通讯,系统板卡和治疗头之间采用dds通讯方式,节省了“双方握手”而耽误的时间;第二、运动板卡采用vxworks嵌入式实时控制系统,采用vxworks嵌入式实时控制系统,使得每个任务的切换时间更短、能够及时得到外界设备的反馈;第三、系统板卡查表获得对应当前能量的电机50毫秒切换参数,包括电机步数和加速度等,并且调用s曲线,实现加速速度从最低点到最高点的平滑过渡,以及减速速度从最高点到最低点的平滑过渡。
29.基于以上原理,本发明设计了一种质子束能量选择控制系统,,一种质子束能量选择控制系统,如图1、图2所示,包括系统板卡13、运动板卡12、降能器1、多个四扇准直器3、11、多个磁铁2、4、5、7、8、9、10,所述多个磁铁包括四级磁铁、导向磁铁和偏转磁铁;所述系统板卡13其输入端连接治疗头、从治疗头获取当前治疗所需要的束流能量信息,其输出端分别连接运动板卡12和磁铁电源2、4、5、7、8、9、10,将降能器步进电机1-17和四扇准直器3、11、步进电机的动作命令发送给运动板卡12,将磁铁电源参数发送给磁铁2、4、5、7、8、9、10电源;所述运动板卡12其输入端连接系统板卡13、输出端连接降能器1和四扇准直器3、11;所述降能器1和四扇准直器3、11分别包括降能器组件、降能器步进电机驱动器1-20和降能器步进电机1-17、四扇准直器组件、四扇准直器步进电机驱动器和四扇准直器步进电机,所述降能器组件和四扇准直器组件,它们的输入端分别为降能器步进电机1-17和四扇准直器步进电机,在降能器步进电机1-17和四扇准直器步进电机的控制下运动;所述降能器步进电机驱动器1-20和四扇准直器步进电机驱动器,它们输入端分别连接运动板卡12,输出端连接各自的步进电机;所述磁铁包括布设在当前束流线上的多个磁铁和每个磁铁内的磁铁电源,该每个磁铁内的磁铁电源的输入端分别连接系统板卡13并从系统板卡13获取对应当前治疗头能量的磁铁电源参数,输出端连接对应的磁铁并控制磁铁磁场,(包括能量选择狭缝和动量选择狭缝)其特点是:所述系统板卡13内安装了vxworks嵌入式实时控制系统,vxworks嵌入式实时控制系统使得每个任务的切换时间更短、能够及时得到外界设备的反馈;所述系统板卡13和治疗头之间为dds通讯,节省了通讯双方握手的时间;
如图2所示,所述系统板卡13包括多任务调度单元、以及查表单元;该多任务调度单元设有同步运动指令传送模块,当多个任务的初始化进程以首尾连接的异步方式启动时,该同步运动指令传送模块通过指令传送的方式,使得异步方式启动的多任务模块在同一时刻接收到调度指令;所述能量选择控制系统控制降能器每一档的降能响应时间快于多楔形降能器的响应时间、能够在50毫秒内完成能量切换;所述对楔形降能器包括一对带有倾角的楔形石墨降能片,该一对带有倾角的楔形石墨降能片的长度或所走的路程是多楔形降能片的长度或多楔形降能片所走的路程的数倍,宽度与多楔形降能片的宽度总和相同。
30.补充说明11、该控制系统包括运动板卡12、系统板卡13、上位机。其中运动板卡用于向步进电机发送脉冲指令;系统板卡内的系统为基于vxworks开发的嵌入式实时操作系统,负责控制单元的主要功能;上位机的上位程序基于qt开发,用于调试测试。
31.2、系统板卡13通过vme总线与运动板卡通信,通过网络端口与磁铁和上位机通信。
32.3、该控制系统控制的束流线上的设备为:质子束能量选择系统和其后方一直到与治疗头相连的旋转机架前的所有磁铁以及四扇准直器。其中主要控制的对象是降能器步进电机1个,四扇准直器/动量选择狭缝步进电机共8个,磁铁电源共46个,每一个都做到独立控制。动量选择狭缝实际上也是一个四扇准直器,只是在特定的位置有特定称呼,并在束流线上起到与普通准直器不同的作用;其中质子束能量选择控制系统包括:降能器、磁铁、四扇准直器、动量选择狭缝。当该控制系统接收到治疗头的能量信息时,会同时向被控设备发送指令,使其运动/调节至相应位置/参数。
33.4、所述嵌入式实时操作系统具有dds通讯模块多任务调度单元、查表单元。
34.5、dds通讯模块用于建立系统与治疗头之间的通信,通过绑定与治疗头相同的通信域,系统作为通信域中的订阅者,循环监听治疗头发送的dds消息,并提取其中包含的束流能量信息。
35.6.多任务调度单元分为降能器任务、四扇准直器任务、磁铁电源任务、同步运动指令传送任务。降能器步进电机任务用于向降能器步进电机驱动发送相关指令,四扇准直器步进电机任务用于向四扇准直器步进电机驱动发送相关指令,磁铁电源通讯任务通过建立udp连接向各类磁铁发送电流以及pid参数信息,同步运动指令传送任务用于向降能器任务、四扇准直器任务、磁铁电源任务发送同步运动指令。
36.7.查表单元通过治疗头处获取的束流能量值,查表获得降能器步进电机需要运动的步数、四扇准直器步进电机需要运动的步数、磁铁电源需要调节的参数。
37.上述表包括“能量-降能器步进电机步数”表,“能量-四扇准直器步进电机步数”表,“能量-磁铁电源参数”表。当获取的能量值不在表中时,判断能量处于表中哪个能量区间,并进行插值计算得到步进电机步数。
38.8.多任务调度单元中的任务模块被创建成任务,每一个被控设备都有一个对应任务即任务包含:同步运动指令传送任务、降能器任务、四扇准直器任务(共8个)、磁铁电源任务(共46个)。
39.9.该系统对上述任务有特定的调度顺序,并在降能器任务、四扇准直器任务中调
用运动板卡中的s曲线算法,通过对步进电机设置最优速度/加速度参数,能够保证每次能量切换时,控制降能器的响应时间在50ms以内。
40.10.该控制系统的多任务调度方式主要通过信号量实现任务同步。
41.调度原理:优先级高的任务会抢先执行,在此之前正在执行的优先级低的任务只能挂起等待(工作至一半就停下),直至优先级高的任务执行完毕或挂起才能继续执行。
42.通过设定优先级,声明各任务的调度顺序: 1.降能器任务;2.四扇准直器任务;3.磁铁电源通讯任务 4.同步运动指令传送任务11.信号量:首先初始化空的信号量,当信号量未被释放时,获取该信号量的任务将被阻塞,会挂起等待直至信号量被其他任务释放,该任务才能继续执行。通过初始化空的降能器信号量、四扇准直器信号量、磁铁电源信号量实现多任务同步。
43.12.首先dds通讯模块通过监听通讯域,获取来自治疗头的通信数据,并将其解析成束流能量值传递给查表单元。;进一步地,如图3所示,所述查表单元设有降能器查表子模块、四扇准直器查表子模块、磁铁电源查表子模块;这些子模块各自根据系统板卡获取的治疗头束流能量值进行查表,从而获得降能器步进电机需要运动的步数、四扇准直器步进电机需要运动的步数、磁铁电源需要调节的参数并各自发送给多任务调度模块。
44.进一步地,如图4所示,所述多任务调度单元设有降能器任务模块、四扇准直器任务模块、磁铁电源任务模块、同步运动指令传送模块;所述的降能器任务模块、四扇准直器任务模块、磁铁电源任务模块分别包括执行初始化任务子模块、等待同步运动指令子模块、接收同步运动指令子模块;所述等待同步运动指令子模块判断当前初始化任务完成以后将各自当前的任务挂起,直至接收到同步运动指令;所述接收同步运动指令子模块接收到同步运动指令以后,降能器任务模块向运动控制卡发送指令,四扇准直器任务模块向运动控制卡发送指令,磁铁电源任务模块向磁铁电源发送指令。
45.进一步地,所述同步运动指令传送模块设有等待挂起子模块、传送同步指令子模块;所述等待挂起子模块等待最后一个任务挂起后通知所述传送同步指令子模块,所述传送同步指令子模块接到通知后向降能器任务模块、四扇准直器任务模块、磁铁电源任务模块发送同步运动指令。
46.进一步地,如图6所示,所述降能器任务模块、四扇准直器任务模块的初始化任务子模块包括调用s曲线算法模块,所述调用s曲线算法模块包括设置s曲线参数子模块,所述设置s曲线参数子模块包括设置四个加速度参数、以及四个减速度参数;磁铁电源任务模块的初始化包括通过建立udp连接的方式建立磁铁电源与系统板卡之间的网络通信。
47.补充说明2:1、系统板卡的多任务调度单元的降能器任务模块通过设置运动板卡中s曲线算法的参数,即曲线参数、步进电机运动速度、加速度,使速度一开始缓慢增加到快速增加,再回到缓慢增加直到速度达到设定期望速度。以实现步进电机的快速启停运动,有利于最大程度降低加速度突变,降低大体积降能片导致的转动惯量的影响。
48.2、如图6所示,s曲线参数:将曲线划分为9段,按照每段曲线的两端点形成的矩形中,下半部分曲线围成的面积占矩形面积的百分比,以此作为参数。其中1、2、3、4、6、7、8、9段曲线所得数据为曲线参数。
49.参数计算方式:通过s曲线算法的函数,使用matlab画出相应的曲线,并计算相应面积百分比。
50.通过多次测试运动驱动卡发送的脉冲信号得到步进电机的运动时间,最终选定最优的速度-加速度组合,实现降能器步进电机的快速控制。
51.进一步地,如图7-1、7-2所示,所述对楔形降能器,包括对楔形降能片、入射准直器1-3、出射准直器1-4、电子尺1-5、步进电机1-17、步进电机驱动器1-20、支撑台架1-19;所述对楔形降能片竖直方向带有一定倾斜角度地安装在支撑台架1-19上,该对楔形降能片由一对带有倾角的楔形石墨降能片通过万向轴和丝杆连接而成、并且对楔形石墨降能片之间留有缝隙,束流沿着垂直于该缝隙的方向穿过;所述入射准直器1-3和出射准直器1-4沿着束流方向布设在所述对楔形降能片两侧的支撑台架上,其高度为束流线中心点的高度;所述电子尺1-5布设在支撑台架1-19的对楔形降能片的一侧,随着对楔形降能片的移动,读取和显示对楔形降能片的位移;所述步进电机1-17通过十字滑块联轴器1-16和右旋滚珠丝杆1-11连接右降能片1-2、带动对楔形降能片做增加对楔形降能片厚度或减少楔形降能片厚度的位移;所述步进电机驱动器1-20输入端连接运动板卡12、输出端连接步进电机1-16;所述万向轴和丝杆包括右旋滚珠丝杆1-11和左旋滚珠丝杆1-10,中间为万向轴。
52.进一步地,所述一对带有倾角的楔形石墨降能片,每块楔形石墨降能片其倾角为12
°
,其厚度为40mm,顶角宽度1mm,低边宽度为100mm,长度500mm;该对楔形降能器相对运动过程中的最大宽度为200 mm,最小宽度为6mm。
53.进一步地,所述对楔形降能片每一档的降能响应时间快于多楔形降能片的响应时间,具体为:每次能量切换时间为50ms以内,相比多楔形片每一档的降能时间快1.2倍以上。
54.进一步地,所述降能器驱动器1-20和步进电机驱动器,分别设有外接运动板卡的接口,通过该接口从运动板卡获得能够确保每次能量切换时间为50ms以内的相关步进电机的运动信息,该运动信息包括确保50毫秒相应时间的运动步数、运动速度、运动加速度。
55.进一步地,如图7-1所示,所述对楔形降能片包括右降能片1-2和左降能片1-1;右降能片1-2连接于右丝杆螺母1-21上、右丝杆螺母1-21连接右旋滚珠丝杆1-11;左降能片连接于左丝杆螺母1-22上、左丝杆螺母1-22连接左旋滚珠丝杆1-10,所述步进电机1-17连接十字滑块联轴器1-16、再通过十字滑块联轴器1-16连接右旋滚珠丝杆1-11转动,通过右旋滚珠丝杆1-11带动万向轴、进而带动左旋滚珠丝杆1-10转动、左旋滚珠丝杆1-10通过左丝杆螺母1-22带动左降能片1-1运动,从而实现步进电机带动左降能片和右降能片做相向运动或相背运动。
56.本发明基于以上一种质子束能量选择控制系统,设计了一种多任务调度方法如图5-1所示,包括以下步骤:步骤一、系统板卡的多任务调度单元接收查表单元的查表结果数据;步骤二、降能器执行初始化任务并开始初始化动作至初始化动作完成;、步骤三、降能器任务挂起并等待同步运动指令,直至接收到同步运动指令;步骤四、四扇准直器执行初始化任务并开始初始化动作至初始化动作完成;、步骤五、四扇准直器任务挂起并等待同步运动指令,直至接收到同步运动指令;步骤六、磁铁电源执行初始化任务并开始初始化动作至初始化动作完成;、步骤七、磁铁电源任务挂起并等待同步运动指令,直至接收到同步运动指令;
步骤八、同步运动指令传送模块发送同步运动指令传送;步骤九、降能器任务模块向运动板卡发送指令;步骤十、四扇准直器任务模块向运动板卡发送指令;步骤十一、磁铁电源任务模块向磁铁电源发送指令。
57.补充说明3:所述发送指令,其实就是每个任务需要的参数,降能器和准直器的任务需要的是步数,电源需要的是电源参数。
58.需要强调的是,上述具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对上述实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。