技术特征:
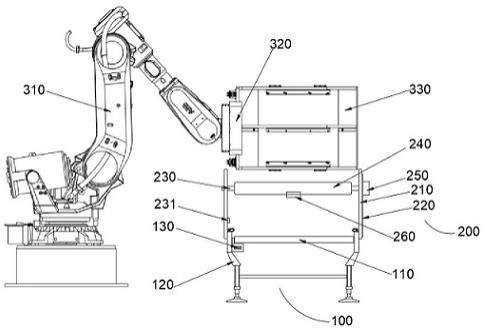
1.一种电子束辐照翻转的装置,其特征在于,包括:传送机构(100),包括用于运送货物的传送带(110)、用于安装所述传送带(110)的流水线体(120)、安装于所述流水线体(120)且传动连接于所述传送带(110)的电机(130)、安装于所述流水线体(120)上的固定板(140)和设置于所述固定板(140)内用于导向的导向轮(150);定位机构(200),包括安装于所述流水线体(120)上的安装架(210)、设置于所述安装架(210)上的滑轨(220)、卡装于所述安装架(210)内的挡料杆(230)、设置在所述挡料杆(230)上用于垫料的护板(240)、连接于所述挡料杆(230)端部且卡装在所述滑轨(220)上的升降机(250)和安装于所述挡料杆(230)用于扫码检测的扫码机(260);翻转机构(300),包括机器人(310)、安装于所述机器人(310)驱动端的驱动器(320)、连接于所述驱动器(320)用于夹持货物的夹持板一(330)与夹持板二(340)、安装于所述夹持板二(340)上的输送带(350)、连接于所述输送带(350)一端的转动机(360)、设置于所述夹持板一(330)内侧的气囊(370)、安装于与所述夹持板一(330)且管道连接所述气囊(370)的气泵(380)。2.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述夹持板一(330)上设有塑形机构(400),所述塑形机构(400)包括插接于所述夹持板一(330)侧面的插杆(410)、连接于所述插杆(410)的连接板(420)、连接于所述连接板(420)与夹持板一(330)的弹簧(430)、可调节地连接于所述连接板(420)侧的限位挡板(440)、安装于所述夹持板一(330)侧的侧轨(450)、卡装于所述侧轨(450)上的卡扣(460)、插接于所述卡扣(460)且对所述气囊(370)定型的塑形带(470)。3.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述升降机(250)上设有辐照设备,且所述扫码机(260)设有位于翻转机构(300)前后侧的两组和位于辐照设备后的一组。4.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述翻转机构(300)设置在相邻的传送带(110)之间,且所述输送带(350)与所述传送带(110)平齐衔接。5.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述挡料杆(230)上还设有光电检测器(231),用于检测货物运动状态。6.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述驱动器(320)由电动气缸控制夹持板一(330)和夹持板二(340)夹取和松开货物,且松开前后保持保持货物在同一水平高度。7.根据权利要求1所述的一种电子束辐照翻转的装置,其特征在于,所述传送带(110)速度的调速范围:0~320rpm/min,且所述翻转机构(300)的翻转的节拍速度随之自动调整。8.一种电子束辐照翻转的方法,使用权利要求1-7中的一种电子束辐照翻转的装置,其特征在于,包括以下操作步骤:s1:根据工艺要求对传送带(110)速度进行设定,并且根据货物外观调整气囊(370)形状,将辐照一面的货物重新输送至传送带(110)上货区位置,第一次正面辐照无需翻转,直接辐照;s2:货物从传送带(110)进入辐射后来到翻转机构(300)前,扫码机(260)进行扫码记录数据;
s3:货物到达输送带(350)上时,通过光电检测器(231)判断待翻转货物位置,然后升降机(250)带动护板(240)降下,阻挡后续货物,此时驱动器(320)带动夹持板一(330)和夹持板二(340)夹持货物,再通知机器人执行翻转动作;s4:翻转完成后降至原位,升起护板(240),后续货物将当前货物从气囊(370)上推出,下次翻转后输送带(350)在下方,依次调换,重复操作;s5:回到后续传送带(110)上的货物进行辐照,辐照完成后被后续扫码机(260)的扫码检测,根据扫码信息判断是否完成翻转,记录该货物二次翻面辐照。
技术总结
本发明属于辐照灭菌技术领域,具体为一种电子束辐照翻转的装置,包括:传送机构、定位机构、翻转机构和塑形机构,所述传送机构包括用于运送货物的传送带、用于安装所述传送带的流水线体、安装于所述流水线体且传动连接于所述传送带的电机、安装于所述流水线体上的固定板和设置于所述固定板内用于导向的导向轮;所述定位机构包括安装于所述流水线体上的安装架、设置于所述安装架上的滑轨、卡装于所述安装架内的挡料杆、设置在所述挡料杆上用于垫料的护板。本发明中,本发明提出一种电子束辐照货物翻转技术,能够实现全自动化,大大提高工作效率及稳定性,降低人工失误导致的勿操作,保证货物的正确性及人员安全的方法。货物的正确性及人员安全的方法。货物的正确性及人员安全的方法。
技术研发人员:史浩 党星
受保护的技术使用者:江苏同威信达技术有限公司
技术研发日:2022.12.12
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。