1.本发明涉及基准图制备领域,特别是一种用于图像匹配的包含角距信息的基准图制备方法。
背景技术:
2.随着时代发展,图像匹配技术作为计算机视觉的一个关键环节在导航领域展现出越发重要的作用。将实际三维景象投影为二维平面基准图进行特征识别是图像匹配的一个重要环节,基准图的制备尤其重要。为了提高匹配精度,需要获得高精度的基准图像。图像匹配技术通过比较图像特征点之间的特征量进行匹配,角距作为一种特征量被广泛应用于对地景象匹配、星光导航等领域。因此,寻找一个能够对全局三维角距信息进行高精度二维表征的方法十分重要。该方法的关键在于对球面全局离散点的三维角距信息进行平面化高精度表征,以提高基准图像的精度。
技术实现要素:
3.针对现有技术存在的不足之处,本发明拟解决的技术问题是,提出一种用于图像匹配的包含角距信息的基准图制备方法。该方法结合角距缩放的改进透视球心方位投影算法获得高精度的图像匹配基准图,并能够从中提取角距信息用于图像匹配。通过在透视球心方位投影算法基础上引入尺度缩放因子,以固定比例缩放平面投影点间的角距,通过重新定义二维角距计算方式弥补平面投影点间角距的缩放变化,完成球面全局离散点角距信息的平面高精度表征,从本技术获得的基准图中提取的角距信息与真实角距的角距差满足1角秒的高精度要求,且能实现全局对应。
4.本发明解决所述技术问题采用的技术方案是:
5.一种用于图像匹配的包含角距信息的基准图制备方法,其特征在于,该方法包括以下步骤:
6.建立球面上任意离散点的三维信息与由经纬度定义的三维坐标之间的一对一映射关系,定义球心到两球面离散点连线间的夹角为球面离散点间的三维角距d3;
7.在透视球心方位投影的计算公式中引入尺度缩放因子k,对投影后的平面角距进行缩放,建立整个球面与平面间的一一对应关系,并满足球面全部离散点都能高精度投影到平面的要求,得到对应投影点的横纵坐标,进而获得球面全局离散点投影后的基准图;
8.获得对应投影点的横纵坐标后,定义a和b为平面两投影点,它们对应的球面离散点分别为a、b,o为平面原点,则平面原点在球面上的投影点为o’,p为球面球心,d
ao’是球面离散点a和o’点间的三维角距,用∠apo'表示;d
bo’是球面离散点b和平面原点的球面投影点o'间的三维角距,用∠bpo'表示;pa
–
pb是∠ao'b,pa为球面离散点a、平面原点的球面投影点o'和北极点z所组成的球面角,pb为球面离散点b、平面原点的球面投影点o'和北极点z所组成的球面角,所述球面角由相应的投影点的平面坐标获得;则两个投影点a和b对应的球面离散点间的二维角距d2按照下述公式计算得到:
9.cos(d2)=cos(d
ao'
)*cos(d
bo'
) sin(d
ao'
)*sin(d
bo'
)*cos(pa-pb);
10.按照上式计算投影得到的基准图中任意两投影点对应的球面离散点间的二维角距,获得含有二维角距的基准图,用于后续的图像匹配。
11.所述建立球面上任意离散点的三维信息与由经纬度定义的三维坐标之间的一对一映射关系的过程是:以球面球心为三维空间坐标系原点,以原点与赤道和本初子午线交点(即0经0纬)的连线为x轴正方向,建立空间直角坐标系,则三维球面上离散点的经纬度坐标与空间直角坐标(x,y,z)之间的转换关系为
[0012][0013]
其中,r为三维球面的半径;
[0014]
统一以(0,-90)和(0,90)表示南极点和北极点,统一使用180
°
经度而不用-180
°
经度,对经纬度进行规范化处理,建立了球面上任意离散点的三维信息与由经纬度定义的三维坐标之间的一对一映射关系。
[0015]
所述尺度缩放因子k大于2。
[0016]
所述制备方法用于对地景象匹配、星光导航等的图像匹配中。
[0017]
利用相机获取物体的三维影像,以此建立球面坐标,确定北极点z,获得球面所有离散点,再进行平面投影。
[0018]
本发明还保护一种计算机可读介质,其存储有使计算机执行处理的计算机程序,所述计算机程序在计算机上运行时执行上述的用于图像匹配的包含角距信息的基准图制备方法。
[0019]
一种电子设备,包括数据获取模块、数据存储模块、显示部和处理部,所述处理部执行上述的用于图像匹配的包含角距信息的基准图制备方法,所述获取模块用于获取物体的三维影像数据;数据存储模块用于存储相关数据;所述显示部用于显示图像匹配过程、及相关参数。
[0020]
与现有技术相比,本发明的有益效果是:
[0021]
(1)本发明方法结合尺度缩放因子进行高精度角距信息投影,改进了原有透视球心方位投影只能投影局部球面离散点的缺陷,能够对球面全局离散点进行保持角距信息不变的二维平面表征。确定了三维球面全局离散点和投影后二维平面点的角距信息的表示方法,保证了投影前后角距信息的表征精度。
[0022]
(2)本发明提出的二维角距可以从基准图的平面投影点中提取对应球面离散点的高精度角距信息,提取基准图中包含的角距信息作为后续图像匹配的特征量。
[0023]
(3)本发明方法能满足投影前后离散点间角距误差小于1角秒的精度要求,同时能够满足对球面全局离散点进行投影的范围要求。能够应用于地图投影、对地景象、星光导航等图像匹配领域中。在实际应用中,本发明能尽可能多的投影三维信息,对三维场景信息进行充分利用,实现球面全局离散点的三维角距信息平面化高精度表征,能够获得具有高精度角距信息的基准图,在图像匹配中具有重要意义。
附图说明
[0024]
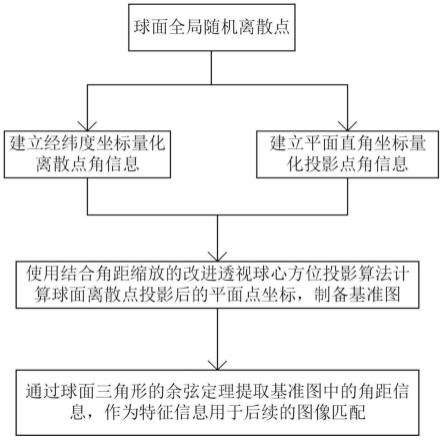
图1为本发明用于图像匹配的包含角距信息的基准图制备方法的流程示意图;
[0025]
图2为本发明中透视球心方位投影的原理图;
[0026]
图3为本发明中透视球心方位投影和球面离散点间二维角距的计算参考示意图;
[0027]
图4为本发明获得的全局球面离散点三维角距信息平面化高精度表征的基准图像;
[0028]
图5为本发明中球面离散点三维角距和基准图提取的二维角距的角距差的均值方差图;
[0029]
图中:
[0030]
o-平面原点,o
’‑
平面原点在球面的对应点(视轴),a、b-球面离散点,a-球面离散点a在平面的投影点,z-球面的北极点,o’x-平面上横轴正方向在球面的投影,p-球面球心
具体实施方式
[0031]
下面结合实例及附图内容对本发明的技术方案进行清楚完整的描述及说明,但并不以此作为本技术保护范围的限定。
[0032]
一种用于图像匹配的包含角距信息的基准图制备方法,该方法的步骤如图1所示:使用相机获取物体的三维影像,以此建立球面坐标,确定北极点z,获得球面所有离散点,进行平面投影。
[0033]
第一步、球面离散点三维信息定义和投影精度量化。
[0034]
采用地理坐标系中的经度和纬度定义球面离散点的三维坐标。以球面球心为三维空间坐标系原点,以原点与赤道和本初子午线交点(即0经0纬)的连线为x轴正方向,建立空间直角坐标系。则可以推导出三维球面上离散点的经纬度坐标与空间直角坐标(x,y,z)之间的转换关系如下:
[0035][0036]
其中,r为三维球面的半径。
[0037]
接下来对经纬度表示方式进行规范化处理,统一以(0,-90)和(0,90)表示南极点和北极点,统一使用180
°
经度而不用-180
°
经度。至此,建立了球面上任意离散点的三维信息与由经纬度定义的三维坐标之间的一对一映射关系。此外,采用二维直角坐标(x,y)定义投影后的平面投影点坐标。
[0038]
引入角距量化球面离散点之间的相对位置关系。角距是从两点外的第三点向两点连线,第三点与两点间两条连线构成矢量之间的夹角。依照这个概念,将球心到两球面离散点连线间的夹角定义为球面离散点间的三维角距d3。在平面投影后,平面角距δ2定义为单位球体的球心与这两点在平面上投影点连线所构成矢量之间的夹角。从投影后的基准图中提取的角距信息,即平面投影点对应的球面离散点间的二维角距d2基于平面角距δ2由公式计算得到。
[0039]
将角距信息平面化表征的精度定义为三维角距d3与二维角距d2之差,称为角距差,
用字母δ表示,计算公式为
[0040]
δ=d
3-d2[0041]
在本发明中,使用上述角距信息定义(三维角距d3与二维角距d2)和投影精度量化方式对球面离散点和基准图中平面投影点提取得到的角距信息进行表示。采用角距差量化球面离散点角距信息的表征精度。
[0042]
第二步、获得球面全局离散点投影后的基准图
[0043]
透视球心方位投影是一种视点在球心的透视方位投影,示意图如图2所示。在计算过程中引入尺度缩放因子k,从而在整个球面与平面间建立一一对应关系,满足球面全局离散点都可以高精度投影到平面的要求,得到用于图像匹配的基准图。球面的投影中心定义为球面球心p,将投影中心到o’的方向称为视轴,投影平面的位置可以与球面相交、相切或相离。
[0044]
透视球心方位投影的计算公式参考示意图3,投影公式如下:
[0045][0046][0047]
其中,λi、是球面离散点a的经度和纬度,λ0、是平面原点的球面投影点o'的经度和纬度,即视轴的经度和纬度;d3是a和o'之间的三维角距,pa是球面角ao'z。由视轴和球面离散点a的经纬度计算出d3和pa,得到对应投影点的横纵坐标x、y。该方法的缺点在于,球面离散点间的三维角距等于平面投影点间的平面角距。而球面角距的可选范围超过了平面角距的表示范围,导致该方法只能投影球面上的局部离散点。为了解决这个问题,我们引入角距缩放的概念,对投影后的平面角距进行缩放,使改进的投影方法能够克服原有透视球心方位投影对球面投影范围的限制。将三维角距d3除以缩放系数k(k可随意取值,为了让球面全局离散点一次性投影到平面上,k需要大于2),得到对应投影点的横纵坐标x、y,获得二维平面基准图。则结合角距缩放的改进透视球心方位投影获得的投影点表示为:
[0048][0049]
其中d为投影中心到投影平面的投影距离,可以为任意距离。d的大小只影响x、y的大小,不影响投影点间的角距。该公式可以以任意方向为视轴,将球面全局离散点等角距地投影到二维平面上。
[0050]
第三步、提取基准图中的角距信息
[0051]
使用球面三角形的余弦定理推导二维角距的计算公式,从投影后的基准图中提取对应球面离散点的角距信息,继而求出球面离散点投影前后的角距差,量化投影前后球面离散点角距信息的表征精度,确保本发明方法能够达到所需精度要求。从基准图中提取的二维角距作为特征量用于后续图像匹配。
[0052]
基准图需要能够提取用于图像匹配的特征信息,这里是角距信息。由改进的透视
球心方位投影算法得到的基准图中,平面投影点对应的球面离散点的二维角距d2需要基于平面投影点的横纵坐标计算获得。第一种情况,两个投影点中有一个是平面原点时,对应球面离散点的二维角距等于投影点间平面角距δ2乘以缩放比例k,d2=kδ2。第二种情况,当平面投影点为平面上任意两点时,上述方法不再适用。原因是该投影方法仅在径向进行角距的比例缩放,而横向没有缩放,这导致当两点间存在横向差距时,不能简单的将平面两点的平面角距乘以缩放系数k。因此,提出采用球面三角形的余弦定理计算球面离散点的二维角距。
[0053]
假设平面两投影点分别为a和b,它们对应的球面离散点分别为a、b,平面原点为o,平面原点的球面投影点为o’,球面上abo'三点构成了一个球面三角形。设球心为p,从投影的平面上可以分别得到a点和o点间平面角距δ
ao
以及b点和o点间平面角距δ
bo
,将二者乘以比例系数k即可得到球面离散点a和o’点间三维角距d
ao’以及球面b点和o’点间三维角距d
bo’,即∠apo'和∠bpo'。根据δ
ao
,δ
bo
和平面投影点a,b的平面坐标,可以反向计算出方位角pa和pb。其中,pa为球面离散点a、平面原点的球面投影点o'和北极点z所组成的球面角,即pa=∠ao'z,同理球面角pb=∠bo'z,于是可得∠ao'b=pa-pb(当a、b在o’的同侧,pa与pb同号;在o’的异侧,pa与pb异号)。在已知∠apo'、∠bpo'、∠ao'b的情况下,球面离散点a和球面离散点b间的二维角距可以通过球面三角形的余弦定理得到,对于由改进透视球心方位投影得到的基准图而言,图中任意两个平面投影点对应的球面离散点间的二维角距d2的计算公式如下:
[0054]
cos(d2)=cos(d
ao'
)*cos(d
bo'
) sin(d
ao'
)*sin(d
bo'
)*cos(pa-pb)
[0055]
其中,d
ao’是∠apo',d
bo’是∠bpo',pa
–
pb是∠ao'b。该公式在第一种情况下也成立。
[0056]
这样本发明能够提取投影后的基准图中任意两个平面投影点对应的球面离散点间的二维角距信息,作为一种特征信息用于后续的图像匹配。
[0057]
在整个球面上随机生成1000个离散点进行结合角距缩放的改进透视球心方位投影,得到图4所示的球面全局离散点三维角距信息平面化高精度表征基准图像。记录1000个球面离散点的经纬度以及它们平面投影点的坐标,然后每次随机选取两个离散点,计算二者的三维角距d3、二维角距d2和角距差δ,每组重复此操作100次,最后计算所得100个角距差的平均值和标准差。重复上述操作10次,得到10个角距差的均值方差图,如图5所示。从图5中的数据可以看出,每次随机选择两个离散点计算角距差,重复100次得到的角距差平均值为10-12
度数量级,而10次重复试验得到的角距差平均值都满足1角秒的高精度要求。
[0058]
证明该方法可以将三维球面全局离散点高精度的投影到二维平面制备用于图像匹配的基准图,并能够从基准图中提取出对应的球面离散点间的角距信息作为特征值用于后续的图像匹配。从基准图中提取的角距信息(二维角距)和球面离散点间的真实角距(三维角距)误差小于1角秒,满足基准图对角距的高精度要求。
[0059]
本发明未述及之处适用于现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
