1.本发明属于风洞模拟装置技术领域,具体的为一种用于模拟瞬态非平稳风场的多叶片翼栅装置。
背景技术:
2.在传统边界层风洞中实现瞬态非平稳风场模拟通常需要利用多叶片翼栅装置。如公开号为cn112504617a的中国专利公开了一种耦合壁面射流与多叶片翼栅的边界层风洞模拟下击暴流的方法,其通过调节导流装置的导流板角度使背景风风场随时间发生突变,模拟下击暴流出流风发展区的非稳态时变特性;再通过在壁面射流装置的出风口设置调节板,调节该调节板的角度,可以改变射流风风场的空间特性分布;如此,将背景风与射流风风场相耦合,即可模拟下击暴流的空间特性和时变特性,即得到一种具有瞬态非平稳风场特性的下击暴流。
3.该方法虽然能够模拟下击暴流的空间特性和时变特性,但需要结合导流装置和壁面射流装置,特别的,壁面射流装置需要在风洞内单独设置壁面射流流道,并在壁面射流流道内安装轴流风机等设备,一方面存在建设成本高的不足,另一方面,需要耦合壁面射流风场和背景风风场,存在控制难度大的问题。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种用于模拟瞬态非平稳风场的多叶片翼栅装置,可直接实现瞬态非平稳风场模拟。
5.为达到上述目的,本发明提供如下技术方案:
6.一种用于模拟瞬态非平稳风场的多叶片翼栅装置,包括支撑框架,所述支撑框架内设有至少两个相互独立的叶片组件;
7.所述叶片组件包括叶片,所述叶片上设有转轴,所述叶片的两端分别设有安装座,所述叶片的两端通过所述转轴分别转动配合安装在两个所述安装座上,所述安装座上设有用于驱动所述叶片绕所述转轴转动的转动驱动机构;
8.所述支撑架上设有分别位于所述叶片两端的直线轨道,所述直线轨道与所述转轴垂直,两个所述安装座分别与对应的所述直线轨道滑动配合,且所述安装座上还设有用于驱动所述叶片沿着所述直线轨道移动的直线驱动机构。
9.进一步,所述叶片的两端分别设有两根所述直线轨道,两根所述直线轨道分别位于所述安装座的两端,所述安装座的两端分别与所述直线轨道滑动配合。
10.进一步,所述安装座包括安装板,所述安装板的两端分别设有连接块,所述连接块上安装有与所述直线轨道滑动配合的滑块。
11.进一步,所述支撑架上设有分别位于所述叶片两端的导杆,所述导杆与所述直线轨道平行,所述安装座上设有导向块,所述导向块上设有与所述导杆滑动配合的导向孔。
12.进一步,所述导向孔的侧壁上设有开口缝,所述开口缝的两侧壁之间设有用于安
装调节螺栓的调节孔。
13.进一步,所述转动驱动机构包括旋转驱动电机、主动齿轮和设置在转轴上的从动齿轮,所述旋转驱动电机的输出轴上设有与所述主动齿轮啮合的驱动齿轮,所述主动齿轮与所述从动齿轮啮合或所述主动齿轮与所述从动齿轮之间设有齿轮组。
14.进一步,所述主动齿轮设为至少一个,所述旋转驱动电机与所述主动齿轮对应设有至少一组,每一组包括至少一个所述旋转驱动电机,且属于同一组的所述旋转驱动电机的输出轴上设置的驱动齿轮均与对应的所述主动齿轮啮合。
15.进一步,所述安装座上设有用于控制所述旋转驱动电机的控制模块。
16.进一步,所述主动齿轮的转轴上设有与其同轴且同步转动的第一齿轮,所述安装板上设有与所述第一齿轮啮合的第二齿轮,所述第二齿轮的转轴上设有与其同步且同步转动的第三齿轮,所述第三齿轮与所述从动齿轮啮合。
17.进一步,所述直线驱动机构包括与所述直线轨道平行的齿条和安装在所述安装座上的直线驱动电机,所述直线驱动电机的输出轴上设有与所述齿条啮合的齿轮。
18.本发明的有益效果在于:
19.本发明用于模拟瞬态非平稳风场的多叶片翼栅装置,通过设置相互独立的叶片组件,使用时,可以利用转动驱动机构独立控制对应叶片的角度按照设定的角度-时间曲线变换;可以利用直线驱动机构独立控制对应叶片的位置按照设定的位置-时间曲线变换;如此,可以单独利用本发明的多叶片翼栅装置模拟具有任意非平稳特性的风场,直接实现瞬态非平稳风场模拟。
20.通过将主动齿轮设为至少一个,将与每一个主动齿轮对应设置的旋转驱动电机设为至少一个,即用于驱动对应叶片转动的旋转驱动电机可以设为多个,根据叶片的角度-时间曲线,当叶片所需的角加速度较大时,可以同时利用多个旋转驱动电机来提供较大的扭矩作用,当然,当叶片所需的角加速度较小时,也可以减少旋转驱动电机的数量,如此,通过多个旋转驱动电机可以承受叶片转动过程中的负载,同时还可以减小每个旋转驱动电机的功率,降低成本;且还可以根据需要控制参与驱动的旋转驱动电机的数量,控制更加灵活。
附图说明
21.为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
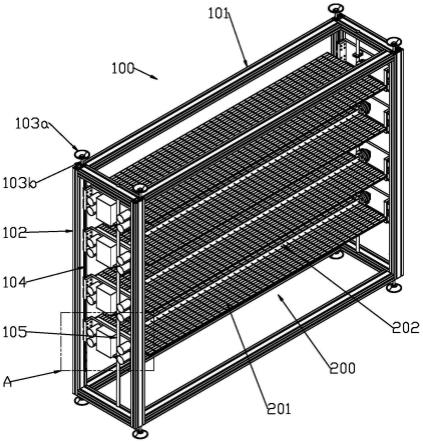
22.图1为本发明用于模拟瞬态非平稳风场的多叶片翼栅装置实施例的结构示意图;
23.图2为图1的a详图;
24.图3为叶片组件的结构示意图;
25.图4为设有旋转驱动机构的安装座的结构示意图;
26.图5为图4的b-b剖视图;
27.图6为图4的立体图;
28.图7为一种叶片角度及叶片间距的示例图;
29.图8为在不同叶片组合下的下击暴流的风场剖面图;
30.图9为在不同叶片间距下的下击暴流的风场剖面图;
31.图10为叶片旋转角度时程与风速时程之间的对应关系曲线图。
32.100-支撑框架;101-矩形框;102-连接杆;103a-连接盘;103b-调节螺栓;104-直线轨道;105-导杆;
33.200-叶片组件;201-叶片;202-转轴;203-安装座;204-旋转驱动电机;205-主动齿轮;206-从动齿轮;207-驱动齿轮;208-第一齿轮;209-第二齿轮;210-第三齿轮;211-控制模块;212-安装板;213-连接块;214-滑块;215-导向块;216-导向孔;217-开口缝;218-调节孔。
具体实施方式
34.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
35.如图1所示,为本发明用于模拟瞬态非平稳风场的多叶片翼栅装置实施例的结构示意图。本实施例用于模拟瞬态非平稳风场的多叶片翼栅装置,包括支撑框架100,支撑框架100内设有至少两个相互独立的叶片组件200。本实施例中,叶片组件200共设为4个,当然,在其他实施例中,叶片组件200的数量可以根据需要设为2个、3个、5个及5个以上,不再累述。具体的,本实施例的支撑框架100包括位于上下两端的两个矩形框101,两个矩形框101之间的四个对角位置处分别设有四根连接杆102相连。本实施例的连接杆102位于竖直方向上,两个矩形框101相背的一侧分别设有用于与风洞流道的顶面和底面配合的连接件。本实施例的连接件包括连接盘103a,对应的矩形框101上设有用于调节连接盘103a位置的调节螺杆103b。
36.本实施例的叶片组件200包括叶片201,叶片201上设有转轴202,叶片201的两端分别设有安装座203,叶片201的两端通过转轴202分别转动配合安装在两个安装座203上,安装座203上设有用于驱动叶片201绕转轴202转动的转动驱动机构。本实施例的转动驱动机构包括旋转驱动电机204、主动齿轮205和设置在转轴202上的从动齿轮206,旋转驱动电机204的输出轴上设有与主动齿轮205啮合的驱动齿轮207,主动齿轮205与从动齿轮206啮合或主动齿轮205与从动齿轮206之间设有齿轮组,本实施例的主动齿轮205与从动齿轮206之间设有齿轮组,齿轮组主要起到减速的作用,从而增大叶片201的转轴202受到的扭矩作用。本实施例的齿轮组为:主动齿轮205的转轴上设有与其同轴且同步转动的第一齿轮208,安装座203上设有与第一齿轮啮合208的第二齿轮209,第二齿轮209的转轴上设有与其同步且同步转动的第三齿轮210,第三齿轮210与从动齿轮206啮合,其中,主动齿轮205的齿数大于驱动齿轮207的齿数,第一齿轮208的齿数小于第二齿轮209的齿数,第三齿轮210的齿数小于从动齿轮206的齿数,从而可使驱动齿轮207与从动齿轮206之间的传动比小于1。当然,在其他一些实施例中,齿轮组还可以采用其他多种方式实现,不再累述。
37.主动齿轮205设为至少一个,旋转驱动电机204与主动齿轮205对应设有至少一组,每一组包括至少一个旋转驱动电机204,且属于同一组的旋转驱动电机204的输出轴上设置的驱动齿轮207均与对应的主动齿轮205啮合。本实施例中,主动齿轮205设为两个,两个主动齿轮205与从动齿轮206之间分别设有齿轮组。本实施例中,旋转驱动电机204与主动齿轮205对应设为两组,每一组包括两个旋转驱动电机204,即旋转驱动电机204一共设为4个。当然,在其他一些实施例中,主动齿轮205的数量及每一组旋转驱动电机204的数量均可根据实际需要设置,不再累述。为了控制多个旋转驱动电机204动作,本实施例的安装座203上设
有用于控制旋转驱动电机204的控制模块211。
38.支撑架100上设有分别位于叶片两端的直线轨道104,直线轨道104与转轴202垂直,两个安装座203分别与对应的直线轨道104滑动配合,且安装座203上还设有用于驱动叶片沿着直线轨道104移动的直线驱动机构。本实施例中,叶片201的两端分别设有两根直线轨道104,两根直线轨道104分别位于安装座203的两端,安装座203的两端分别与直线轨道104滑动配合,可使叶片201沿着直线轨道104移动的过程中更加稳定。本实施例的直线轨道104共设为四根,四根直线轨道104分别设置在四根连接杆102上。具体的,本实施例的安装座203包括安装板212,安装板212的两端分别设有连接块213,连接块213上安装有与直线轨道104滑动配合的滑块214。在本实施例的优选方案中,支撑架100上设有分别位于叶片201两端的导杆105,导杆105与直线轨道104平行,安装座203上设有导向块215,导向块215上设有与导杆105滑动配合的导向孔216。本实施例的导向孔216的侧壁上设有开口缝217,开口缝217的两侧壁之间设有用于安装调节螺栓的调节孔218,如此,可以调节导向孔216的孔径大小,从而调节导向块215与导杆105之间的摩擦力大小,即调节安装座203沿着直线轨道104移动时的阻力大小,使安装座203沿着直线轨道104移动时的位置控制更加准确。直线驱动机构可以采用现有的多种方式实现,本实施例中,直线驱动机构包括与直线轨道104平行的齿条(图中未示出)和安装在安装座203上的直线驱动电机(图中未示出),直线驱动电机的输出轴上设有与齿条啮合的齿轮(图中未示出),如此,利用直线驱动电机驱动齿轮转动,利用齿轮与齿条之间的啮合关系,独立控制每一个叶片201沿着直线轨道104移动。
39.下面以模拟下击暴流为例,对本实施例用于模拟瞬态非平稳风场的多叶片翼栅装置的作用原理进行进一步说明。
40.如图7所示,将4个叶片201从上指标依次编号为#1~#4,以叶片201顺时针旋转角度为正。如图8所示,分别以#1~#4叶片201对应的旋转角度α来区别不同工况,如case-1-20-2-30-3-30-4-60表示#1叶片201的旋转角度为20度,#2叶片201的旋转角度为30度,#3叶片201的旋转角度为40度,#4叶片201的旋转角度为60度。如图8所示,横坐标表示风速,为方便比较,统一用理论风场剖面的最大风速u
max
进行无量纲化;纵坐标表示高度,统一用理论风剖面最大风速对应的高度zm进行无量纲化。叶片201的旋转角度对下击暴流风场剖面形状及最大风速出现的位置影响显著,叶片201同步旋转工况(case-1-30-2-30-3-30-4-30,case-1-40-2-40-3-40-4-40和case-1-50-2-50-3-50-4-50)模拟的风场剖面虽然也呈“鼻型”状,但近地面最大风速出现高度以及剖面形状均明显偏离理论剖面,而叶片201异步旋转工况(如case-1-20-2-30-3-30-4-60)模拟的风场剖面则更加符合理论风场剖面。因此相比于同步旋转的多叶片翼栅装置,本实施例可以通过独立控制每个叶片201异步转动,通过多个叶片201不同转动角度的组合,能够更好地实现模拟任意下击暴流风场剖面的目的。同时,通过独立控制每一个叶片201转动,还可以模拟下击暴流风场剖面在不同形状之间的变化过程,从而重现实际下击暴流不同发展阶段风场剖面的变化,而不同阶段叶片的加减速转动可以模拟下击暴流的瞬态非平稳风场。
41.此外数值模拟结果发现各叶片201之间的间距对模拟的风场剖面也具有较大的影响,基于图8中case-1-20-2-30-3-30-4-60工况,继续调整板间间距,其中case1的板间间距见图7,分别为0.3,0.4,0.4,0.4,0.3;case2的间距为0.3,0.4,0.4,0.3,0.4,通过case2模拟的风场可以发现改变靠近地面板的间距可以增大近地面风速,使之更加接近目标剖面而
对风场的上部变化影响不大,如图9所示。case3在case2的基础上进一步调整上方叶片201的间距,依次调整为0.45,0.3,0.35,0.3,0.4,发现上部风速进一步增大并逐渐接近理论目标值。由此可知,本实施例通过独立控制每一个叶片201的位置,也可以更好地实现模拟任意下击暴流风场剖面的目的,同时,通过独立控制每一个叶片201的位置,还可以模拟下击暴流风场剖面在不同形状之间的变化过程,即可以模拟下击暴流的瞬态非平稳风场。
42.在实际应用过程中,还可以在独立控制叶片201转动角度的同时调节叶片201沿着直线轨道104移动的位置,叠加叶片201角度和叶片201间距对下击暴流风场剖面的影响,直接实现如下击暴流的瞬态非平稳风场模拟。如图10所示,给出了4个叶片的旋转角度时程,分别为:1#叶片在3.0-3.1秒的旋转角度为50
°
,其余时间为0
°
;2#叶片和3#叶片在3.0-3.1秒的旋转角度为30
°
,其余时间为0
°
;4#叶片在3.0-3.1秒的旋转角度为60
°
,其余时间为0
°
。根据4个叶片的旋转角度时程,采集高度分别为0.4m、0.5m和0.6m的风速时程,结果表明该风速时程能够较好反应下击暴流风场的瞬态非平稳特性。
43.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。