1.本发明涉及牲畜养殖技术领域,尤其涉及一种牲畜养殖用自动喂食装置。
背景技术:
2.畜牧业是指利用畜禽等已经被人类驯化的动物,或者鹿、麝、狐、貂、水獭、鹌鹑等野生动物的生理机能,通过人工饲养、繁殖。
3.在进行牛、羊等中大型动物养殖的过程中,养殖场一般采用单笼的方式进行集中养殖,即一头牛一个饲养栏,或者三至五只羊一个饲养栏,可以对养殖的动物进行全方位的监管。
4.经检索,中国专利申请号为202121400047.9的专利,公开了一种牲畜养殖用自动喂食装置,包括底座,所述底座的顶部固定安装有分隔板,所述分隔板的顶部固定安装有顶棚,所述分隔板的左侧为投食区,所述分隔板的右侧为喂食区,所述投食区设置有投食仓,所述投食仓固定安装在分隔板的左侧壁上,所述投食仓上还开设有投食口,所述喂食区设置有喂食槽,所述喂食槽固定安装在底座上,所述喂食区还设置有红外传感器和重力传感器,所述红外传感器位于顶棚的底部,所述重力传感器位于喂食槽的内腔底部,所述投食仓的底部固定连接有投食管道,所述投食管道贯穿分隔板并插入喂食槽的内部,所述投食管道上还设置有电动阀门,所述底座的顶部还固定安装有电源箱,所述电源箱位于投食仓的下方。
5.上述专利中的自动喂食装置存在以下不足:该装置采用开放式食槽对蓄养的动物进行喂食,食槽在进行饲料投喂过程中,动物可以直接从食槽内部获取食物,且投食管道直接裸露在食槽内部,投食管道导入饲料的过程,会被动物直接观察到,长时间的使用,会让动物形成条件反射,容易诱导动物直接向投食管道采用攻击手段获取食物,导致装置发生损坏,不利于整体装置的长时间使用。
技术实现要素:
6.本发明的目的是解决现有技术中存在的缺点,而提出的一种牲畜养殖用自动喂食装置。
7.为了实现上述目的,本发明采用了如下技术方案:一种牲畜养殖用自动喂食装置,包括:投食组件,所述投食组件的一侧固定连接有喂食组件,所述喂食组件固定安装于圈养围栏的一端;所述投食组件包括定位板一,所述定位板一上表面的一边侧固定安装有背板一,所述背板一的一侧依次设置有防撞板、控制部和定位体,所述防撞板的正面固定连接有投食部,所述投食部的底端固定连接有定位箱,所述定位箱的底端固定连接有传动箱;所述传动箱与定位体传动连接,且所述传动箱带动定位箱、投食部和防撞板向喂食组件的方向移动,所述喂食组件包括食槽部,所述投食部将饲料投放至食槽部内部。
8.作为本发明一种优选的:所述控制部包括控制柜,所述控制柜的一侧固定安装有控制器,且所述控制柜的正面固定安装有红外反射板一。
9.作为本发明一种优选的:所述定位体的正面对称设置有两个限位卡臂一,两个所述限位卡臂一之间设置有齿板一。
10.作为本发明一种优选的:所述投食部包括投食箱,所述投食箱一侧内壁的顶部等距固定安装有多个红外测距仪二,另一侧内壁的顶部等距固定安装有多个红外反射板二,且所述投食箱底端内壁的一边侧固定安装有电磁阀管,所述电磁阀管与控制器电性连接。
11.作为本发明一种优选的:所述传动箱的背面对称设置有两个滑动卡臂,两个所述滑动卡臂之间设置有齿轮一,所述齿轮一的正面固定连接有传动轴。
12.作为本发明一种优选的:所述传动轴的一端传动连接有减速器,所述减速器传动连接有驱动电机,所述驱动电机与控制器电性连接。
13.作为本发明一种优选的:所述喂食组件包括定位板二,所述定位板二上表面的一边侧固定安装有背板二,所述背板二的正面设置有定位导向部,所述定位导向部的顶端等距固定安装有多个食槽部。
14.作为本发明一种优选的:所述食槽部包括喂食槽,所述喂食槽的顶端固定连接有橡胶圈,且所述喂食槽的底端内壁设置有承载板,所述承载板的下表面等距设置有多个重力传感器。
15.作为本发明一种优选的:所述定位导向部包括定位导向体,所述定位导向体的顶端等距开设有多组插孔,每组所述插孔之间设置有连接通孔。
16.作为本发明一种优选的:所述定位导向体的正面对称设置有两个限位卡臂二,两个所述限位卡臂二之间设置有齿板二。
17.本发明的有益效果为:1.该自动喂食装置通过定时投入饲料,便于控制蓄养动物的进食次数,操作简单,使用方便,通过防撞板堵住定位槽,避免动物形成反射,在投食时,对装置进行攻击,保护整体装置。
18.2.该自动喂食装置通过定量投入饲料,保证喂食槽内部始终存在饲料(白天喂养阶段),每次投入的饲料数量,不能使动物吃饱,动物吃完后,继续投入饲料,增加动物的进食次数,是动物形成进食条件反射(投食后,动物进食),加快动物的成长速度。
附图说明
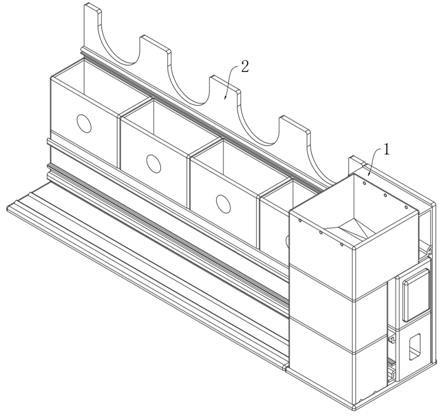
19.图1为本发明整体装配的结构示意图;图2为本发明投食组件的结构示意图;图3为本发明控制部及其附属结构的结构示意图;图4为本发明投食部及其附属结构的结构示意图;图5为本发明喂食组件的结构示意图;图6为本发明定位导向部的结构示意图;图7为本发明食槽部的剖视结构示意图。
20.图中:1、投食组件;11、定位板一;111、导轨一;12、传动箱;121、滑动卡臂;122、齿轮一;123、传动轴;124、减速器;125、驱动电机;126、支撑滚轮;13、定位箱;131、红外测距仪
一;132、支撑座;14、投食部;141、投食箱;142、红外测距仪二;143、红外反射板二;144、电磁阀管;15、防撞板;16、背板一;161、滑轨一;17、控制柜;171、控制器;172、红外反射板一;18、定位体;181、导向通槽一;182、限位卡臂一;183、齿板一;2、喂食组件;21、定位板二;22、导轨二;23、背板二;24、定位槽;25、滑轨二;26、定位导向部;261、定位导向体;262、插孔;263、连接通孔;264、导向通槽二;265、限位卡臂二;266、齿板二;27、食槽部;271、喂食槽;272、橡胶圈;273、承载板;274、重力传感器;275、导线连接管;276、插柱。
具体实施方式
21.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
22.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
23.一种牲畜养殖用自动喂食装置,如图1至图7所示,包括:投食组件1,投食组件1的一侧固定连接有喂食组件2,喂食组件2设置为一体式或者分段式,每一段配置一个投食组件1,喂食组件2固定安装于圈养围栏的一端,蓄养的牛羊等中大型动物,在圈养围栏里便可以直接进食。
24.投食组件1包括定位板一11,定位板一11上表面的一边侧焊接有多个导轨一111,定位板一11上表面的另一边侧通过螺栓固定安装有背板一16,背板一16的一侧依次设置有防撞板15、控制部和定位体18。
25.背板一16的正面焊接有滑轨一161,防撞板15与滑轨一161滑动连接;控制部用于监管并控制整体装置;定位体18与背板一16、定位板一11固定连接。
26.防撞板15的正面固定连接有投食部14,投食部14的底端固定连接有定位箱13,定位箱13的底端固定连接有传动箱12,传动箱12滑动安装在定位板一11的上表面,并与导轨一111卡接。
27.传动箱12与定位体18传动连接,且传动箱12带动定位箱13、投食部14和防撞板15向喂食组件2的方向移动,喂食组件2包括食槽部27,投食部14将饲料投放至食槽部27内部。
28.传动箱12的背面对称设置有两个滑动卡臂121,滑动卡臂121与传动箱12焊接,两个滑动卡臂121之间设置有齿轮一122,齿轮一122的正面固定连接有传动轴123,传动轴123的一端贯穿至传动箱12内部,并通过轴承与传动箱12的箱体转动连接。
29.传动轴123的一端通过直齿轮传动连接有减速器124,减速器124固定安装在传动箱12的内部,减速器124通过链条和链轮传动连接有驱动电机125,驱动电机125固定安装在传动箱12内部,且驱动电机125与控制器171电性连接。
30.传动箱12的底端转动安装有两组支撑滚轮126,支撑滚轮126与导轨一111适配,并滚动设置在导轨一111的顶端。
31.定位箱13的背面固定安装有红外测距仪一131,红外测距仪一131的一端安装有支撑座132,支撑座132固定在定位箱13的内部。
32.投食部14包括投食箱141,投食箱141固定在定位箱13的顶端,投食箱141一侧内壁的顶部等距固定安装有多个红外测距仪二142,另一侧内壁的顶部等距固定安装有多个红外反射板二143,红外测距仪二142与红外反射板二143配合,测量投食箱141内部的饲料储
量。
33.投食部14每进行一次投食工作之前,投食箱141内部的饲料高度遮住红外反射板二143,红外测距仪二142与红外反射板二143无法形成红外线的发射与反射通路,此时,投食箱141内部的饲料满足投食需要;若红外测距仪二142与红外反射板二143形成红外线的发射与反射通路,则需要继续向投食箱141内部注入饲料。
34.投食箱141底端内壁的一边侧固定安装有电磁阀管144,电磁阀管144用于导出投食箱141内部的饲料,电磁阀管144与控制器171电性连接,电磁阀管144的开启与闭合由控制器171控制。
35.控制部包括控制柜17,控制柜17与背板一16固定,且控制柜17的一侧固定安装有控制器171,且控制柜17的正面固定安装有红外反射板一172;红外反射板一172红外测距仪一131相互配合,用于确定定位箱13的位置,继而确定投食部14的位置。
36.定位体18的正面对称设置有两个限位卡臂一182,两个限位卡臂一182与两个滑动卡臂121配合卡接,并通过滚珠、滚子相互滑动,两个限位卡臂一182之间设置有齿板一183,齿板一183与定位体18焊接,且齿轮一122啮合与齿板一183的上表面;定位体18的一端开设有导向通槽一181,导向通槽一181内部用于安装导线,导线与控制器171连接。
37.喂食组件2包括定位板二21,定位板二21与定位板一11的一端卡接,定位板二21上表面的一边侧通过螺栓固定安装有背板二23,背板二23与背板一16的一端卡接。
38.定位板二21上表面的一边侧焊接有多个导轨二22,导轨二22与导轨一111相对应,便于传动箱12移动至定位板二21的上表面。
39.背板二23的正面设置有定位导向部26,定位导向部26固定在定位板二21的上表面,定位导向部26的顶端等距固定安装有多个食槽部27。
40.背板二23的正面顶部焊接有滑轨二25,滑轨二25与滑轨一161对应,便于防撞板15移动至背板二23的正面,且背板二23的顶端开设有多个定位槽24,定位槽24便于蓄养的动物将头部伸入食槽部27进食。
41.定位导向部26包括定位导向体261,定位导向体261固定在定位板二21的上表面,且定位导向体261的顶端等距开设有多组插孔262,每组插孔262之间设置有连接通孔263。
42.定位导向体261的一端开设有导向通槽二264,导向通槽二264与导向通槽一181连通,且与连接通孔263连通。
43.定位导向体261的正面对称焊接有两个限位卡臂二265,两个限位卡臂二265与两个限位卡臂一182相对应,便于滑动卡臂121移动;两个限位卡臂二265之间设置有齿板二266,齿板二266焊接在定位导向体261的正面,并与齿板一183相对应,便于齿轮一122移动。
44.食槽部27包括喂食槽271,喂食槽271的顶端粘接有橡胶圈272,用于保护动物的颈部,且喂食槽271的底端内壁设置有承载板273,承载板273用承载饲料,承载板273的下表面等距设置有多个重力传感器274。
45.喂食槽271的数量与定位槽24相同,并一一对应,且喂食槽271的底端焊接有多个插柱276,插柱276插接在插孔262内部;其喂食槽271的底端焊接有导线连接管275,导线连接管275插接在连接通孔263内部,重力传感器274的导线穿过导线连接管275与控制器171电性连接。
46.本实施例在使用时:
一、定时投食;通过控制器171控制驱动电机125定时启停,带动投食部14依次移动至不同的喂食槽271顶端,再控制电磁阀管144开启,根据重力传感器274反馈的信息,控制电磁阀管144关闭,继而控制喂食槽271内部投入饲料的数量。
47.定时投入饲料,便于控制蓄养动物的进食次数,操作简单,使用方便,通过防撞板15堵住定位槽24,避免动物形成反射,在投食时,对装置进行攻击,保护整体装置。
48.二、不定时定量投食;根据重力传感器274反馈的信息,确定喂食槽271内部的饲料数量,当喂食槽271内部饲料的数量过少时,控制器171通过驱动电机125带动投食部14移动至对应的喂食槽271上方,进行投食,使喂食槽271内部的饲料数量保持在一定基数。
49.定量投入饲料,保证喂食槽271内部始终存在饲料(白天喂养阶段),每次投入的饲料数量,不能使动物吃饱,动物吃完后,继续投入饲料,增加动物的进食次数,是动物形成进食条件反射(投食后,动物进食),加快动物的成长速度。
50.三、条件反射养成;在防撞板15面对蓄养动物的一侧设置有防护结构的灯光板,投食时,灯光板闪烁,投食结束后,灯光板关闭,并转移位置,让蓄养动物进食,配合不定时定量投食的步骤,使蓄养动物形成进食条件反射。
51.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。