1.本技术涉及图像数据处理技术领域,特别涉及一种汽包水位图像识别方法及其装置。
背景技术:
2.锅炉是化工、炼油、发电的等工业生产过程中必不可少的主要的动力设备,它所产生的高压蒸汽既可以作为风机、压缩机、大型泵类的驱动的动力源,又可作为蒸馏、化学反应、干燥和蒸发等过程的热源;随着工业生产规模的不断扩大,生产设备的不断创新,作为全厂的动力和热源的保护,亦向着大容量、高参数、高效率发展,为了确保安全,稳定生产,锅炉设备的控制中,调节任务之一是对锅炉汽包水位的控制,若水位过低,则会时汽包内的水量变化速度很快,不及时控制会使汽包内的水全部汽化,导致锅炉烧坏或爆炸;若水位过高会影响汽包的汽水分离,产生蒸汽带水现象,使过热器管壁结构导致破坏,目前,常规测量汽包水位的手段主要有3种:云母式双色水位计、电接点式水位计、差压式水位计,在现有的对汽包水位的识别存在以下问题:(1)双色云母式水位计是利用光学原理,使水显示绿色,蒸汽显示红色来表示水位的,但是只能在控制室内用于水位监视,不能参与水位自动调整和保护;(2)锅炉的给水流量、蒸汽流量都存在测量误差,锅炉汽包水位也因间断性补水而出现“虚假水位”现象。
3.参考专利申请号cn201710146340.9-一种汽包水位监控方法、装置及系统公开了:双色水位计,安装在汽包上,根据汽包水位在对应的刻度标尺上进行显示;摄像头,用于采集所述双色水位计上的刻度显示的图像;摄像头保护装置,设置在所述摄像头周围用户保护所述摄像头;汽包水位监控装置,与所述摄像头连接,接收所述摄像头采集的图像信息并进行处理。该方案中将实时采集的汽包液位图像信号通过信号电缆实时传输到控制室的汽包水位监控装置,采用智能图像识别算法自动辨识出汽包液位的精确数值,不受测量噪声或其他干扰信号污染。
4.此现有技术优化了对锅炉汽包水位读数的准确性,但从其方案针对的来说,将实时采集的汽包液位图像信号传输至控制室,这一过程并没有涉及到水位调整和保护,使锅炉汽包水位过高或过低导致锅炉爆炸或损坏,因此本技术提供一种汽包水位图像识别方法及其装置,实现对锅炉汽包水位的图像识别,也可以根据获取的数据进行水位的自动调整。
技术实现要素:
5.本技术的目的是提供一种汽包水位图像识别方法及其装置,旨在解决获取锅炉汽包水位的图像存在误差和不能参与水位自动调整和保护的问题。
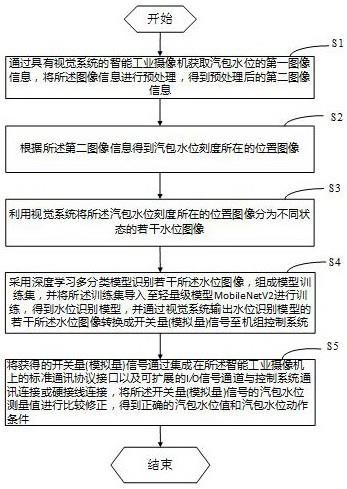
6.为实现上述目的,本技术提供如下技术方案:本技术提供一种汽包水位图像识别方法,包括:s1:通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述
第一图像信息进行预处理,得到预处理后的第二图像信息;s2:根据所述第二图像信息得到汽包水位刻度所在的位置图像;s3:利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的若干水位图像;s4:采用深度学习多分类模型识别若干所述水位图像,组成模型训练集,所述训练集包含m组训练样本,表示为:,定义其所述训练集的损失函数为:,其中h
w,b
为输出值,w为权值参数,b为偏置,x
(i)
为第i组训练样本的输入,y
(i)
为第i组训练样本的期望输出,h
w,b
(x
(i)
)-y
(i)
为神经网络训练后的预测结果,并将所述训练集导入至轻量级模型mobilenetv2进行训练,得到水位识别模型,并通过视觉系统输出水位识别模型的若干所述水位图像转换成开关量或模拟量信号至机组控制系统;s5:将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件。
7.进一步的,所述通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述图像信息进行预处理,得到预处理后的第二图像信息的步骤中,包括:将所述图像信息进行归一化,将其等分成n行n列的网格,分别统计各个网格中黑像素的数量,获得n*n维的网格特征向量,提取代表汽包水位大小的外围特征向量,判断所述图像信息中汽包水位刻度所在位置。
8.进一步的,所述利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的若干水位图像的步骤中,包括:通过所述视觉系统将不同状态下的水位图像分为以下7种:高a、高b、高c、低a、低b、低c、正常。
9.进一步的,所述步骤s4包括:所述采用深度学习多分类模型的步骤为:采集不同水位图像组成模型训练集;选用轻量级模型mobilenetv2作为模型,并使用训练集进行训练。
10.进一步的,所述采集不同水位图像组成模型训练集;选用轻量级模型mobilenetv2作为模型,并使用训练集进行训练的步骤包括:采用小样本问题训练方法进行若干水位图像的训练集训练,具体为:预训阶段:采用与所述水位图像同源的公共图像集进行训练;微调阶段:用所述不同状态的水位图像进行训练,完成模型的微调,得到水位识别模型。
11.进一步的,所述采用深度学习多分类模型识别若干所述水位图像还包括:计算所述训练集的损失函数后,经过激活函数的作用得到输出的特征图,公式如下:
其中表示层数,表示特征图第层的特征图,和表示特征图第层的权值和偏置,表示特征图第层中第个卷积核对应的第个卷积窗口,表示特征图第层输入的加权和,*表示二维卷积操作,表示所选择的输入特征图的集合,是隐含层激活函数,表示特征图第层的第个特征图。
12.进一步的,所述将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件的步骤中,包括:根据不同状态下的水位图像转换成开关量或模拟量信号,将开关量或模拟量信号和汽包双色水位计测量的汽包水位测量值进行比较修正。
13.本技术还提供一种汽包水位图像识别装置,包括:获取模块:通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述第一图像信息进行预处理,得到预处理后的第二图像信息;处理模块:根据所述第二图像信息得到汽包水位刻度所在的位置图像;分类模块:利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的若干水位图像;训练模块:采用深度学习多分类模型识别若干所述水位图像,组成模型训练集,所述训练集包含m组训练样本,表示为:,定义其所述训练集的损失函数为:,其中h
w,b
为输出值,w为权值参数,b为偏置,x
(i)
为第i组训练样本的输入,y
(i)
为第i组训练样本的期望输出,h
w,b
(x
(i)
)-y
(i)
为神经网络训练后的预测结果,并将所述训练集导入至轻量级模型mobilenetv2进行训练,得到水位识别模型,并通过视觉系统输出水位识别模型的若干所述水位图像转换成开关量或模拟量信号至机组控制系统;修正模块:将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件。
14.本技术还提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时实现上述的一种汽包水位图像识别方法的步骤。
15.本技术还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程
序被处理器执行时实现上述的一种汽包水位图像识别方法的步骤。
16.本技术提供了一种汽包水位图像识别方法及其装置,具有以下有益效果:(1)在本发明中使用了具有视觉系统的智能工业摄像机,在智能工业摄像机内嵌入实时数字信号处理器和控制算法对实时汽包水位画面进行处理,防止出现汽包水位的图像存在误差的情况;(2)通过视觉系统将不同状态的水位图像转换成开关量或模拟量信号,将该组信号接入机组控制系统,用该组信号和其它测量方式的锅炉汽包水位测量值进行比较修正,得到更为真实的锅炉汽包水位值以及更为可靠的汽锅炉包水位动作条件;(3)将经过处理好的锅炉汽包水位信号,通过集成在智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统,通讯连接或硬接线连接,可以更加满足锅炉汽包水位监视、自动调节、保护的不同功能系统要求。
附图说明
17.图1为本技术一实施例的汽包水位图像识别方法的流程示意图;图2为本技术一实施例的汽包水位图像识别方法的流程框图;图3为本技术一实施例的汽包水位图像识别装置的结构框图;图4为本技术一实施例的计算机设备的结构示意框图。
18.本技术为目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
19.应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
20.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
21.参考图1和图2,为本技术提出的一种汽包水位图像识别方法的流程示意图和流程框图;本技术所提供的一种汽包水位图像识别方法,步骤包括:s1:通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述第一图像信息进行预处理,得到预处理后的第二图像信息;将所述第一图像信息进行归一化,将其等分成n行n列的网格,分别统计各个网格中黑像素的数量,获得n*n维的网格特征向量,提取代表汽包水位大小的外围特征向量,判断所述图像信息中汽包水位刻度所在位置。
22.在此步骤中,对汽包水位的第一图像信息进行预处理,预处理操作主要是转化为灰度图像、边缘检测、滤波处理增强图像,完成图像灰度化、几何校正、平滑去噪、二值化、细化和归一化等一系列操作,从预处理后的汽包水位的图像信息中找出汽包水位刻度所在的位置,实现对汽包水位刻度值的自动定位,提取代表汽包水位大小的外围特征向量的步骤为:将获得的点阵网络特征向量等分为n行;第i(i=1,2,...,n)行中,计算出该行中点从图像左边缘至第一项由白变黑的长度,如果没有由白变黑的点,则默认为0;第i(i=1,2,...,
n)行中,计算出该行中点从图像左边缘至第二项由白变黑的长度,如果没有由白变黑的点,则默认为0;依次重复上述各步骤,提取获得代表汽包水位大小的外围特征的上、下、右边缘的特征。
23.s2:根据所述第二图像信息得到汽包水位刻度所在的位置图像。
24.s3:利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的水位图像;通过所述视觉系统将不同状态下的水位图像分为以下7种:高a、高b、高c、低a、低b、低c、正常。
25.在此步骤中,根据不同状态下的水位图像可以做出对应的水位自动调节,其中可以采用电接点式水位计,电接点式水位计是利用汽包内饱和蒸汽及凝结水介质的电阻率相差极大的性质,来分辨和指示水位的;实际中采用水位容器将汽包内水位引出,然后在水位容器上安装电接点。在控制室内能准确指示水位,并能输出电接点信号接入机组控制系统;也可采用差压式水位计,通过把液位高度变化转化成差压变化来测量水位的;差压式水位计由平衡容器、差压变送器、显示仪表组成,水位信号连续显示,可输出标准4~20 ma信号,经过温度、压力补偿的信号用于水位记录,实现水位自动调节,差压式水位计与汽包水位之间的关系为:其中,h为汽水侧取样孔距离(mm),l为汽侧取样孔与汽包零水位的距离(mm),h为汽包水位偏差零水位的值(mm),δp为汽包水位对应的差压值,ps为饱和蒸汽密度,pw为饱和水密度,pa为平衡容器参考水柱密度,h、l、i均是定值,pa除了受汽包压力的影响,还和平衡容器的散热情况、环境温度等有关。
26.通过视觉系统将不同状态下的若干水位图像分为以下7种:高a、高b、高c、低a、低b、低c、正常,高a为比正常的水位高一个刻度,低a为比正常的水位低一个刻度,高b、高c、低b、低c依次类推;若汽包水位为高a,高b,高c的其中一种,蒸汽空间的有效高度就会减小,汽水分离效果就会降低以致严重破坏,从而使饱和蒸汽带水而进入过热器,使汽温急聚降低,严重时会把水带入汽轮机,造成大事故,另一方面由于蒸汽带水会使蒸汽中盐分增加,品质不合格,于是在过热器及汽轮机的通流部分就会出现积盐现象,水位图像高a至高c水位逐渐增加,对锅炉造成的危害越来越严重;若汽包水位为低a,低b,低c,则可能导致小循环破坏,在水位图像正常情况下,炉水进入下降管时,部分静压转变为动压,同时下降管入口又有局部阻力,所以,当水进入下降管后,压力是要降低的,但在汽包内足够高水位的作用下,使此处的炉水压力也还比汽包内工作压力高,但当汽包内水位过低时,水进入下降管后其压力便将低于汽包工作压力,这时引处炉水将立即汽化,蒸汽又上升返回汽包影响了下降管连续降水,造成小循环的破坏,会产生所谓的抽空现象,所以汽包水位过低会破坏小循环以致造成炉管爆破。
27.s4:采用深度学习多分类模型识别若干所述水位图像,组成模型训练集,所述训练集包含m组训练样本,表示为:,定义其所述训练集的损失函数为:,其中h
w,b
为输出值,w为权值参
数,b为偏置,x
(i)
为第i组训练样本的输入,y
(i)
为第i组训练样本的期望输出,h
w,b
(x
(i)
)-y
(i)
为神经网络训练后的预测结果,并将所述训练集导入至轻量级模型mobilenetv2进行训练,得到水位识别模型,并通过视觉系统输出水位识别模型的若干所述水位图像转换成开关量或模拟量信号至机组控制系统所述采用深度学习多分类模型的步骤为:采集不同水位图像组成模型训练集;选用轻量级模型mobilenetv2作为模型,并使用训练集进行训练;采用小样本问题训练方法进行若干水位图像的训练集训练,具体为:预训阶段:采用与所述水位图像同源的公共图像集进行训练;微调阶段:用所述不同状态的水位图像进行训练,完成模型的微调,得到水位识别模型;所述采用深度学习多分类模型识别若干所述水位图像还包括:计算所述训练集的损失函数后,经过激活函数的作用得到输出的特征图,公式如下:其中表示层数,表示特征图第层的特征图,和表示特征图第层的权值和偏置,表示特征图第层中第个卷积核对应的第个卷积窗口,表示特征图第层输入的加权和,*表示二维卷积操作,表示所选择的输入特征图的集合,是隐含层激活函数,表示特征图第层的第个特征图。
28.在此步骤中,输出的特征图是用设定好大小的卷积核以滑动窗口的形式与输入的样本做卷积,每次移动一个步长的距离,将卷积得到的值相加,再加上一个卷积核的偏置,经过激活函数的作用得到该层输出的特征图;采用深度学习多分类模型识别汽包水位图像,首先定义好特征空间,将汽包水位图像对应到特征空间中的某一点,根据汽包水位不平衡比例确定一个采样倍率n,按欧式距离找出最邻近汽包水位图像的样本,从中随机选取一个样本点,在特征空间中样本点与最邻近样本点的连线段上随机选取一点作为新的样本点,重复以上的步骤,就可以得出汽包水位图像的平衡点,根据训练结果对训练集进行调整,得到水位识别模型,水位识别模型为mobilenetv2模型和训练集得到;再通过视觉系统将水位图像转换成开关量或模拟量信号,将该组信号接入机组控制系统,用该组信号和其它测量方式的锅炉汽包水位测量值进行比较修正,得到更为真实的锅炉汽包水位值以及更为可靠的汽锅炉包水位动作条件。这种方案可以更加满足锅炉汽包水位监视、自动调节、保护的不同功能系统要求。
29.s5:将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件;根据不同状态下的水位图像转换成开关量或模拟量信号,将开关量或模拟量信号和汽包双色水位计测量的汽包水位测量值进行比较修正。
30.在此步骤中,双色水位计是利用光学原理,使水显示绿色,蒸汽显示红色来表示水位的;它具有显示清晰、直观,当与汽包水位视觉系统配套使用时,还可以实现远距离传送
水位图像,将将开关量或模拟量信号和汽包双色水位计测量的汽包水位测量值进行比较修正,得到正确的汽包水位测量值,并对其进行自动调节和保护,防止汽包水位过高或过低导致锅炉损坏。
31.参考图3,本发明还提供一种汽包水位图像识别装置,包括:获取模块:通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述第一图像信息进行预处理,得到预处理后的第二图像信息;处理模块:根据所述第二图像信息得到汽包水位刻度所在的位置图像;分类模块:利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的若干水位图像;训练模块:采用深度学习多分类模型识别若干所述水位图像,组成模型训练集,所述训练集包含m组训练样本,表示为:,定义其所述训练集的损失函数为:,其中h
w,b
为输出值,w为权值参数,b为偏置,x
(i)
为第i组训练样本的输入,y
(i)
为第i组训练样本的期望输出,h
w,b
(x
(i)
)-y
(i)
为神经网络训练后的预测结果,并将所述训练集导入至轻量级模型mobilenetv2进行训练,得到水位识别模型,并通过视觉系统输出水位识别模型的若干所述水位图像转换成开关量或模拟量信号至机组控制系统;修正模块:将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件。
32.参照图4,本技术实施例中还提供一种计算机设备,该计算机设备可以是服务器,其内部结构可以如图4所示。该计算机设备包括通过系统总线连接的处理器、存储器、网络接口和非易失性存储介质。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的数据库用于存储水位测量值等数据。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种汽包水位图像识别方法。
33.本领域技术人员可以理解,图4中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定。
34.本技术一实施例还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现一种汽包水位图像识别方法的步骤,具体为:s1:通过具有视觉系统的智能工业摄像机获取汽包水位的第一图像信息,将所述第一图像信息进行预处理,得到预处理后的第二图像信息;s2:根据所述第二图像信息得到汽包水位刻度所在的位置图像;s3:利用视觉系统将所述汽包水位刻度所在的位置图像分为不同状态的若干水位图像;
s4:采用深度学习多分类模型识别若干所述水位图像,组成模型训练集,所述训练集包含m组训练样本,表示为:,定义其所述训练集的损失函数为:,其中h
w,b
为输出值,w为权值参数,b为偏置,x
(i)
为第i组训练样本的输入,y
(i)
为第i组训练样本的期望输出,h
w,b
(x
(i)
)-y
(i)
为神经网络训练后的预测结果,并将所述训练集导入至轻量级模型mobilenetv2进行训练,得到水位识别模型,并通过视觉系统输出水位识别模型的若干所述水位图像转换成开关量或模拟量信号至机组控制系统;s5:将获得的开关量或模拟量信号通过集成在所述智能工业摄像机上的标准通讯协议接口以及可扩展的i/o信号通道与控制系统通讯连接或硬接线连接,将所述开关量或模拟量信号的汽包水位测量值进行比较修正,得到正确的汽包水位值和汽包水位动作条件。
35.综上所述,本技术将汽包水位视觉系统中的工业摄像机拍摄到的锅炉汽包水位图像,通过视觉系统将不同状态下7种水位图像转换成开关量或模拟量信号,将该组信号接入机组控制系统,用该组信号和其它测量方式的锅炉汽包水位测量值进行比较修正,得到更为真实的锅炉汽包水位值以及更为可靠的汽锅炉包水位动作条件。这种方案可以更加满足锅炉汽包水位监视、自动调节、保护的不同功能系统要求。
36.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的和实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可以包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram通过多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双速据率sdram(ssrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
37.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、装置、物品或者方法不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种过程、装置、物品或者方法所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、装置、物品或者方法中还存在另外的相同要素。
38.以上所述仅为本技术的优选实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。
39.尽管已经示出和描述了本技术的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本技术的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。