1.本发明涉及铁路隧道工程领域,具体涉及一种高铁隧道异物侵限和周界侵入自动化监测方法及系统。
背景技术:
2.随着我国高速铁路的迅速发展,以及高铁对线型的特殊要求,隧道工程数量也大大增多,与之而来的就是如何保证高铁隧道运营安全的问题。高铁隧道在建设以及运营的过程中,由于受到诸如地质、地形、气候条件和设计、施工、运营等各种因素的影响导致的隧道开裂、错台、大变形甚至掉块现象时有发生,影响高铁行车安全。运营期间各类人员违规侵入隧道线位内等问题也是隧道结构安全和高铁行车安全的重大威胁。如不能及时对上述异常情况进行感测、报警,有可能造成极大的经济损失和不良的社会影响,隧道异物侵限和周界侵入多发生在隧道运营期间,主要有异物侵限和周界侵入和人员侵入,其中异物侵限包括掉块、设备掉落、违规邻近施工,周界侵入主要指人员非法侵入。目前的隧道异物侵限和周界侵入主要依靠天窗期间铁路人员的巡检来发现,有条件的依靠相关的视频监控设备进行监控,但这几种方式人工成本高,监测效率低,在时间上具有滞后性,急需一种自动化监测方法及系统。
技术实现要素:
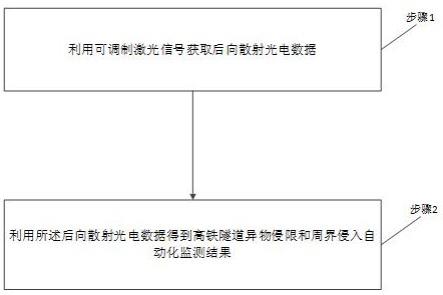
3.针对现有技术的不足,本发明提供了一种高铁隧道异物侵限和周界侵入自动化监测方法,包括:
4.利用可调制激光信号获取后向散射光电数据;
5.利用所述后向散射光电数据得到高铁隧道异物侵限和周界侵入自动化监测结果。
6.优选的,所述利用可调制激光信号获取后向散射光电数据包括:
7.利用可调制激光信号基于光放大器得到可调制激光放大信号;
8.利用所述可调制激光放大信号基于环形器发射至高铁隧道光纤后,得到后向散射光信号;
9.利用所述后向散射光信号进行光电转换得到后向散射光电数据。
10.优选的,所述利用后向散射光电数据得到高铁隧道异物侵限和周界侵入自动化监测结果包括:
11.利用所述后向散射光电数据进行解析得到后向散射光电解析数据;
12.利用所述后向散射光电解析数据得到高铁隧道异物侵限和周界侵入自动化监测结果。
13.进一步的,所述利用后向散射光电数据进行解析得到后向散射光电解析数据包括:
14.利用所述后向散射光电数据基于瑞利散射原理计算后向散射光振幅值;
15.利用所述后向散射光振幅值计算后向散射光功率值;
16.利用所述后向散射光功率的峰值计算后向散射光强度值;
17.利用所述后向散射光振幅值、后向散射光功率值与后向散射光强度值作为后向散射光电解析数据。
18.进一步的,所述利用后向散射光电数据基于瑞利散射原理计算后向散射光振幅值的计算式如下:
[0019][0020]
其中,f为准单色脉冲光的频率,w为脉冲宽度,ai(aj)为入射光在第i个散射中心产生的散射脉冲光的振幅,τi为单个脉冲周期内第i个散射脉冲光的时间延迟,n是整个传感光纤的散射中心个数,α是光纤衰减常数,c是真空中光速,nf是光纤的折射率,ei是第i 个散射点的入射光,ri是第i个散射点的反射率,αs是瑞利散射损耗系数。
[0021]
进一步的,所述利用后向散射光振幅值计算后向散射光功率值的计算式如下:
[0022]
p(t)=|e(t)|2=e(t)*e
(t)
=p1(t) p2(t)
[0023]
其中,p(t)为后向散射光功率值,p1(t)为各散射中心的后向散射光强值,p2(t)为同一个脉冲宽度内不同部分后向散射光干涉值。
[0024]
进一步的,所述利用后向散射光功率的峰值计算后向散射光强度值的计算式如下:
[0025][0026]
其中,s为后向散射系数,αs为瑞利散射因子,c为真空中光速,n0为纤芯折射率,τ为光脉冲宽度,α为光纤损耗系数,z为散射点到入射端的距离。
[0027]
进一步的,所述利用后向散射光电解析数据得到高铁隧道异物侵限和周界侵入自动化监测结果包括:
[0028]
利用高铁隧道初始光电数据获取高铁隧道异物侵限和周界侵入自动化监测的标准阈值;
[0029]
当所述后向散射光电解析数据的后向散射光振幅值低于标准阈值,后向散射光信号频率低于标准阈值,后向散射光振动时间较短时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道内存在混凝土掉落,利用所述后向散射光振幅值对应的后向散射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置;
[0030]
当所述后向散射光电解析数据的后向散射光振幅值高于标准阈值,后向散射光信号频率低于标准阈值,后向散射光振动时间较长时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道上方存在挖掘机施工作业,利用所述后向散射光振幅值对应的后向散射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置;
[0031]
当所述后向散射光电解析数据的后向散射光振幅值高于标准阈值,后向散射光信号频率高于标准阈值,后向散射光振动时间较长时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道上方存在钻孔施工作业,利用所述后向散射光振幅值对应的后向散射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置。
[0032]
进一步的,所述利用高铁隧道初始光电数据获取高铁隧道异物侵限和周界侵入自
动化监测的标准阈值包括:
[0033]
采集高铁隧道基础施工完成后模拟意外状况的光纤振动数据;
[0034]
利用所述高铁隧道基础施工完成后模拟意外状况的光纤振动数据作为高铁隧道初始光电数据基于短时傅里叶变换得到高铁隧道异物侵限和周界侵入自动化监测的标准阈值;
[0035]
其中,所述光纤振动数据为模拟意外状况的光纤振动数据与模拟意外状况对应的光纤振动噪声数据。
[0036]
基于同一发明构思,本发明还提供了一种高铁隧道异物侵限和周界侵入自动化监测系统,包括预先设置于高铁隧道拱顶外侧混凝土保护层外与中央排水沟侧壁预留沟槽中的分布式振动感测光缆、感测模块、传输模块、处理模块与监测模块,所述感测模块为可调制激光器、信号放大器、光环形器、分布式振动光纤解调器,所述传输模块为光电转换器,所述处理模块为中央处理器,监测模块为输出报警器,所述分布式振动感测光缆的输出端与感测模块的输入端连接,所述感测模块的输出端与处理模块的输入端通过传输模块连接,所述处理模块的输出端与监测模块的输入端连接,所述感测模块的可调制激光器的输出端与光环形器的输入端通过信号放大器连接,所述光环形器的输出端与分布式振动光纤解调器的输入端连接,所述分布式振动光纤解调器的输出端作为感测模块的输出端。
[0037]
与最接近的现有技术相比,本发明具有的有益效果:
[0038]
利用隧道异物侵限和周界侵入点输入脉冲与接收到信号的时间延迟来判断干扰点的位置,实现了隧道运营期异物侵限和周界侵入长距离分布式监测。分布式振动感测光缆封装后便于施工期间的安装,激光器、调制解调器仪和计算机则保证了光脉冲的可控和监测处理数据工作的自动化,运营期监测成本较人工测量大大降低。
附图说明
[0039]
图1是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的流程图;
[0040]
图2是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的光路原理图;
[0041]
图3是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的入侵检测原理图;
[0042]
图4是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的光纤瑞利散射模型图;
[0043]
图5是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的钻机打孔现场分布图;
[0044]
图6是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的钻机打孔事件瀑布图;
[0045]
图7是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的钻机打孔事件方差图;
[0046]
图8是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的钻机位置和背景噪声时域波形对比图和短时傅里叶对比图;
[0047]
图9是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的挖掘机铲土事件相位瀑布图;
[0048]
图10是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的挖掘机铲土事件相位方差图;
[0049]
图11是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的挖掘机挖土位置和背景噪声时域波形对比图和短时傅里叶对比图;
[0050]
图12是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的有无铲土动作波形幅度和频率局部放大对比图;
[0051]
图13是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的工程车辆行驶相位瀑布图;
[0052]
图14是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的工程车辆行驶相位方差图;
[0053]
图15是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的车辆行驶位置和背景噪声时域波形对比图和短时傅里叶对比图;
[0054]
图16是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的落石事件(隔排水沟)相位瀑布图;
[0055]
图17是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的落石事件(隔排水沟)相位方差图;
[0056]
图18是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的落石冲击信号的时域波形和短时谱图;
[0057]
图19是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的事件沿光纤皮长定位图;
[0058]
图20是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的事件距离光缆垂直距离估计图;
[0059]
图21是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的垂直定位估计偏差图;
[0060]
图22是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的隧道内混凝土掉落信号图;
[0061]
图23是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的隧道上方挖掘机施工信号图;
[0062]
图24是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测方法的隧道上方钻孔施工信号;
[0063]
图25是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测系统模块连接图;
[0064]
图26是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测系统的现场连接示意图;
[0065]
图27是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测系统的现场截断面示意图;
[0066]
图28是本发明提供的一种高铁隧道异物侵限和周界侵入自动化监测系统的现场
施工示意图。
具体实施方式
[0067]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0068]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0069]
实施例1:
[0070]
本发明提供了一种高铁隧道异物侵限和周界侵入自动化监测方法,如图1所示,包括:
[0071]
步骤1:利用可调制激光信号获取后向散射光电数据;
[0072]
步骤2:利用所述后向散射光电数据得到高铁隧道异物侵限和周界侵入自动化监测结果。
[0073]
步骤1具体包括:
[0074]
1-1:利用可调制激光信号基于光放大器得到可调制激光放大信号;
[0075]
1-2:利用所述可调制激光放大信号基于环形器发射至高铁隧道光纤后,得到后向散射光信号;
[0076]
1-3:利用所述后向散射光信号进行光电转换得到后向散射光电数据。
[0077]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,振动感测系统光路原理图,如图2所示,可调制激光器(laser)经光放大器(edfa)后,通过光环形器2端连接振动探测器,振动探测器返回的信号通过环形器2端进入3端,后端连接光电探测器(pd)。
[0078]
步骤2具体包括:
[0079]
2-1:利用所述后向散射光电数据进行解析得到后向散射光电解析数据;
[0080]
2-2:利用所述后向散射光电解析数据得到高铁隧道异物侵限和周界侵入自动化监测结果。
[0081]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,瑞利散射原理,如图 3所示,光脉冲调制器将激光器所发出的连续光调制成脉冲光,经edfa放大后通过耦合器注入到传感光纤中,光纤本身的折射率不均匀使得在其中传播的光波发生瑞利散射,后向瑞利散射光经光纤再次返回到耦合器,并经过光探测器进行光电转换传输到电脑上做进一步的处理,当光纤沿线上某一位置点处发生入侵(振动),那么该位置处的光纤折射率和光纤长度将发生变化,进而导致该处的后向瑞利散射光的相位受到调制。
[0082]
步骤2-1具体包括:
[0083]
2-1-1:利用所述后向散射光电数据基于瑞利散射原理计算后向散射光振幅值;
[0084]
2-1-2:利用所述后向散射光振幅值计算后向散射光功率值;
[0085]
2-1-3:利用所述后向散射光功率的峰值计算后向散射光强度值;
[0086]
2-1-4:利用所述后向散射光振幅值、后向散射光功率值与后向散射光强度值作为后向散射光电解析数据。
[0087]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,所述后向散射
数据基于后向散射离散模型进行分析和模拟,根据光纤离散模型,可将光纤看成是一系列的反射镜所组成,如图4所示,所述光纤作为反射镜可以看作是在一个特定长度l的光纤内随机分布的散射体后向散射的矢量和,l内的后向散射光的电场具有随机的相位和幅度,因而散射的矢量和将会随机的落在一个复平面内;
[0088]
为了得到这些散射体的反射率和相位统计特性,假设在l长度内的光纤存在m个独立的瑞利散射单元,且每个散射单元的偏振方向一致,所述m个独立散射单元的场矢量如下式:
[0089][0090]
其中,所述rk和φk分别是第k段光纤内的m个后向散射单元的幅度和相位,所述ai和ωi是
△
l内第i个后向散射点的幅度和相位,所述rk、φk、ai、ωi都是随机变量。为了简化分析过程,假设ai、ωi都是独立的,并对于所有的i分布都是一样的,并且ωi是均匀分布在 (-π,π)上;
[0091]
散射单元的反射率r和相位φ的概率密度函数如下式:
[0092][0093][0094]
其中,σ2近似等于10-7
/2,r、φ分别服从瑞利分布和均匀分布。
[0095]
步骤2-1-1的计算式如下:
[0096][0097]
其中,f为准单色脉冲光的频率,w为脉冲宽度,ai(aj)为入射光在第i个散射中心产生的散射脉冲光的振幅,τi为单个脉冲周期内第i个散射脉冲光的时间延迟,n是整个传感光纤的散射中心个数,α是光纤衰减常数,c是真空中光速,nf是光纤的折射率,ei是第i 个散射点的入射光,ri是第i个散射点的反射率,αs是瑞利散射损耗系数。
[0098]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,当[t-τi]/w≤1时,框函数否则框函数为0。其中,ai=e
iri
αs,ei是第i个散射点的入射光,ri是第i个散射点的反射率,αs是瑞利散射损耗系数。在暂不考虑外部振动的情况下,时间延迟τi与第i个散射中心位置zi的关系τi=2nfzi/c;
[0099]
所述后向瑞利散射光的光功率的如下式:
[0100]
p(t)=|e(t)2|=e(t)*e
(t)
=p1(t) p2(t)
[0101]
其中,所述p1(t)为光纤各个散射中心所产生的后向散射光在接收端所探测到的光强,表述为常规otdr的瑞利散射光强曲线,所述p2(t)则代表了同一个脉冲宽度内不同部分之间干涉的结果;
[0102]
所述后向瑞利散射光的光功率的展开公式如下:
[0103][0104][0105]
通过p1(t)的表达式可以看出,其不包含相位信息,因此对相位变化不敏感;而p2(t)部分表示了光纤上不同部分之间干涉的结果,它则包含了相位信息,是φ-otdr检测所需要的部分。通过在某点施加挤压或振动,可在φ
ij
的基础上叠加一个变化的相位,从而使得p2(t)部分包含外界振动相位信息。其中,φ
ij
表示脉冲宽度内光纤上两个散射点zi和zj之间的相位差,其值为φ
ij
=4πvn
vzij
/c,z
ij
=z
i-zj。最后对前后两次探测的结果相减即可得到振动的位置信息。
[0106]
步骤2-1-2的计算式如下:
[0107]
p(t)=|e(t)|2=e(t)*e
(t)
=p1(t) p2(t)
[0108]
其中,p(t)为后向散射光功率值,p1(t)为各散射中心的后向散射光强值,p2(t)为同一个脉冲宽度内不同部分后向散射光干涉值。
[0109]
步骤2-1-3的计算式如下:
[0110][0111]
其中,s为后向散射系数,αs为瑞利散射因子,c为真空中光速,n0为纤芯折射率,τ为光脉冲宽度,α为光纤损耗系数,z为散射点到入射端的距离。
[0112]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,其中散射点到入射端的距离z由光脉冲发射与返回到接收端的时间差及光在光纤中的传播速度如下式:
[0113][0114]
步骤2-2包括:
[0115]
2-2-1:利用高铁隧道初始光电数据获取高铁隧道异物侵限和周界侵入自动化监测的标准阈值;
[0116]
2-2-2:当所述后向散射光电解析数据的后向散射光振幅值低于标准阈值,后向散射光信号频率低于标准阈值,后向散射光振动时间较短时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道内存在混凝土掉落,利用所述后向散射光振幅值对应的后向散射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置;
[0117]
2-2-3:当所述后向散射光电解析数据的后向散射光振幅值高于标准阈值,后向散射光信号频率低于标准阈值,后向散射光振动时间较长时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道上方存在挖掘机施工作业,利用所述后向散射光振幅值对应的后向散射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置;
[0118]
2-2-4:当所述后向散射光电解析数据的后向散射光振幅值高于标准阈值,后向散射光信号频率高于标准阈值,后向散射光振动时间较长时,高铁隧道异物侵限和周界侵入自动化监测结果为隧道上方存在钻孔施工作业,利用所述后向散射光振幅值对应的后向散
射光电解析数据接收延迟获取高铁隧道异物侵限和周界侵入位置。
[0119]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,接收端测得的光纤中 z1、z2两个散射点的光功率分别为p(z1)和p(z2),那么这两点间的平均衰减系数如下式:
[0120][0121]
后向散射光功率的变化,也即后向散射光产生的干涉波纹的变化,对前后两次的后向散射光功率曲线相减即可实现振动定位根据两点间的平均衰减系数确定高铁隧道异物侵限和周界侵入位置。
[0122]
步骤2-2-1具体包括:
[0123]
2-2-1-1:采集高铁隧道基础施工完成后模拟意外状况的光纤振动数据;
[0124]
2-2-1-2:利用所述高铁隧道基础施工完成后模拟意外状况的光纤振动数据作为高铁隧道初始光电数据基于短时傅里叶变换得到高铁隧道异物侵限和周界侵入自动化监测的标准阈值;
[0125]
其中,所述光纤振动数据为模拟意外状况的光纤振动数据与模拟意外状况对应的光纤振动噪声数据。
[0126]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,所述高铁隧道基础施工完成后模拟意外状况包括钻机打孔、挖掘机铲土(工程车辆行驶)、隧道内落石;
[0127]
钻机打孔实验中,钻孔机沿光缆径向根据到采集设备距离不同,分为远、中、近三组(距离最近点光缆埋设最浅,~2m,随径向距离增加,土层逐渐加厚)。其中,每组又按距离光纤垂向距离0m、3m、6m、9m、15m依次重复打孔操作(最远点只在0m处进行了实验),每个垂向距离处,共进行5次打孔操作,打孔深度约50cm,这5个孔的排列如图5所示,以距离光缆垂向距离3m的钻机打孔数据为例,继相位解调后作瀑布图,如图6所示,横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值的绝对值越大,相位强度越大;为更清晰地显示钻机打孔事件,对相位数据做短时方差(0.1s)。结果如图7所示,横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值越大,相位强度越大。事件影响范围约在370-445米位置,持续时间约为一分半钟,取钻机打孔和背景噪声两个位置,分别进行时域波形(左一列)和短时傅里叶(右一列)对比。在短时傅里叶变换过程中,窗函数选用汉明窗,窗宽设为256(约为重复频率的1/4)。如图8所示,在时域波形图上能够明显分辨出钻机打孔事件;在短时谱上,可以看出背景噪声主要集中在10hz 以下,钻机打孔事件的频率范围大约在60hz以下;
[0128]
挖掘机铲土实验中,挖掘机沿光缆径向根据到采集设备距离不同,分为远、中、近三组 (距离最近点光缆埋设最浅,~2m,随径向距离增加,土层逐渐加厚)。挖掘机铲土实验现场如图9-图12所示。其中,每组又按距离光纤垂向距离0m、3m、6m、9m、15m依次重复挖掘操作(最远点只在0m处进行了实验),每个垂向距离处,共进行5次挖掘操作,挖掘深度约50cm,以距离光缆垂向距离3m的挖掘机铲土数据为例,继相位解调后作瀑布图,如图 9所示。横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值的绝对值越大,相位强度越大,对相位数据做短时方差(0.1s)并作图,如图10所示,横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值越大,相位强度越大。可见,挖掘机挖土事件
效果清晰,能够分辨出五次挖土动作。事件影响范围约在350-420米位置,五次挖土动作持续时间约为两分半钟,取挖掘机铲土和背景噪声两个位置,分别进行时域波形(左一列)和短时傅里叶(右一列)对比。在短时傅里叶变换中,窗函数选用汉明窗,窗宽设为256(约为重复频率的1/4)。如图11所示,在时域波形图上能够明显分辨出挖掘机铲土事件的五次动作;在短时谱图上,可以看出背景噪声主要集中在10hz以下,挖掘机铲土事件的频率范围大约在40hz以下,分别取挖掘机铲土动作(368米处,45-55秒时间段)和无铲土动作(368米处,20-30秒时间段)的相位数据进行波形幅度(左一列)和频率 (右一列)的对比。如图12所示,波形图上可见,铲土动作的波形幅度主要在40弧度以内,无铲土动作发动机的波形幅度主要在5弧度以内,对比明显;短时谱图上可见,铲土动作的频率主要集中在40hz以下,无铲土动作时发动机的频率主要集中在25hz左右,对比明显。据此,可以考虑将发动机的主频率值作为特征进行后续车辆类型的识别,所述挖掘机铲土实验中还包括相似工程车辆行驶情况,本项试验中,所用工程车辆为铲车,该铲车在光缆覆土厚度为~2m的区域,在距离光纤垂向距离0m、3m、6m、9m、15m处来回行驶,每个垂向距离处来回匀速行驶5次,以距离光缆垂向距离0m的工程车辆行驶数据为例,继相位解调后并作瀑布图,如图13所示。横轴为距离(米),纵轴为时间(分钟),颜色表示相位强度,色度条对应颜色值的绝对值越大,相位强度越大,对相位数据做短时方差(0.1s)并作图,如图14所示,10分钟内的工程车辆的五个来回行驶事件清晰可见。横轴为距离(米),纵轴为时间(分钟),颜色表示相位强度,色度条对应颜色值越大,相位强度越大。行驶事件的影响范围大致在156-270米位置处,取工程车辆行驶和背景噪声两个位置,分别进行时域波形(左一列)和短时傅里叶(右一列)对比。在短时傅里叶变换过程中,窗函数选用汉明窗,窗宽设为256(约为重复频率的1/4)。如图15所示,在时域波形图上能够明显分辨出工程车辆行驶事件;在短时傅里叶图上,可以看出背景噪声主要集中在10hz以下,工程车辆行驶事件的频率范围大约在50hz以下;
[0129]
隧道内落石实验中,隧道内部由于排水沟还未完成最后工序,因此光缆还未能按设计方案置入排水沟内测,本次实验所用光缆平行于排水沟铺设在地表,光缆未使用其他方法增加与地面的耦合。实验中所用落石重~0.5kg,由实验人员在隧道施工平台(距离地面~7m)使石头自由落体,并按光缆与排水沟的位置关系,分别在有光缆侧(西侧)以及无光缆侧(东侧)各进行了5次落石实验,当实验在排水沟西侧,距光缆2.5m处,隔排水沟,高度为7m,落石事件(隔排水沟)相位解调后并作瀑布图,如图16所示。横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值的绝对值越大,相位强度越大,对相位数据做短时方差(0.1s)并作图,如图17所示,两次落石事件(隔排水沟)清晰可见。横轴为距离(米),纵轴为时间(秒),颜色表示相位强度,色度条对应颜色值越大,相位强度越大。落石事件影响范围约在180-240米位置,对第一次落石事件(黄色方框圈出部分)进行局部放大,落石冲击信号的时域波形图及短时谱图,如图17所示。由于落石是一个瞬时冲击,所以包含较多的高频分量,在落地时介质吸收了高频部分,导致高频部分快速衰减;
[0130]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,对环境噪声、钻机打孔、挖掘机挖土(工程车辆行驶)、隧道内落石等实验数据在时域和频域上的分析作为依据,在实际应用情况中分别将时域上的强度信息和频域上的主频率信息按照从弱到强划分为0~5 共6个等级,具体见下表1、表2:
[0131][0132][0133]
表1
[0134][0135]
表2
[0136]
根据上述表1和表2的等级划分情况,得到5个事件,即环境噪声、钻机打孔、挖掘机挖土、工程车辆行驶及隧道内落石在时频域上的特征信息,如表3所示:
[0137]
事件编号事件名称时域特征-强度频域特征-主频率
①
环境噪声00
②
钻机打孔15
③
挖掘机挖土34
④
工程车辆行驶53
⑤
隧道内落石13
[0138]
综上,结合时频域上的特征信息,发现隔事件组在特征上存在差别,因而可以被识别。
[0139]
当事件发生时,信号局部强度变大,通过寻找局部强度最大位置,确定事件位置,如图 19所示,最终可得光缆皮长定位精度正负4米;当事件原理光缆时,局部振动强度下降,通过分析局部振动强度变化情况,可以判定事件距离光缆的距离,如图20所示。垂直距离定位精度为正负3米,如图21所示。
[0140]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测方法,所述隧道内混凝土掉落信号,如图22所示;隧道上方挖掘机施工信号,如图23所示;隧道上方钻孔施工信号,如图24所示。
[0141]
实施例2:
[0142]
本发明提供了一种高铁隧道异物侵限和周界侵入自动化监测系统,如图25所示,包括预先设置于高铁隧道拱顶外侧混凝土保护层外与中央排水沟侧壁预留沟槽中的分布式振动感测光缆、感测模块、传输模块、处理模块与监测模块,所述感测模块为可调制激光器、信号放大器、光环形器、分布式振动光纤解调器,所述传输模块为光电转换器,所述处理模块为中央处理器,监测模块为输出报警器,所述分布式振动感测光缆的输出端与感测模块的输入端连接,所述感测模块的输出端与处理模块的输入端通过传输模块连接,所述处理模块的输出端与监测模块的输入端连接,所述感测模块的可调制激光器的输出端与光环形器的输入端通过信号放大器连接,所述光环形器的输出端与分布式振动光纤解调器的输入端连接,所述分布式振动光纤解调器的输出端作为感测模块的输出端。
[0143]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测系统,所述安装工作步骤,如图26所示,包括:
[0144]
s1沿隧道纵向安装分布式振动感测光缆;
[0145]
s2振动感测光缆连接至光探测器及超窄线宽激光器;
[0146]
s3激光探测器连接至分布式振动解调仪;
[0147]
s4激光器和分布式振动解调仪连接至计算机;
[0148]
s5超窄线宽激光器发射光脉冲并通过计算机采集信号;
[0149]
s6计算机通过测量输入脉冲与接收到信号的时间延迟来判断异物侵限和周界侵入点的位置。
[0150]
本实施例中,一种高铁隧道异物侵限和周界侵入自动化监测系统,如图27所示,高速铁路隧道实际安装,实施段落里程为dk46 092~dk53 300,共7.208km,dk50 430处有由隧道直通地面的疏散竖井,疏散竖井内设有设备用房,所述安装工作过程包括:
[0151]
(i)沿隧道纵向安装分布式振动感测光缆:隧道异物侵限和周界侵入感测模块实时感测隧道内人员走动、列车振动、设备掉落、衬砌掉块、隧道覆土异常扰动、洪水冲刷异常振动等并予以识别。如图28所示,在中央排水沟侧壁预留沟槽内和拱顶外侧混凝土保护层外分别沿隧道纵向通长布置一条振动感测光缆,布设安装范围为dk46 092~dk53 300,布设长度共 7208m。
[0152]
(ii)振动感测光缆连接至光探测器及超窄线宽激光器:将分布式振动感测光缆引入 dk50 430处疏散竖井中,一端分别连接至光探测器和超窄线宽激光器。
[0153]
(iii)激光探测器连接至分布式振动解调仪:在疏散竖井内设备专用机房放置分布式振动解调仪、计算机、激光探测器和激光器,其中激光探测器连接至分布式振动解调仪。
[0154]
(iv)激光器和分布式振动解调仪连接至计算机:激光器和分布式振动解调仪通过无线网卡连接至计算机。
[0155]
(v)超窄线宽激光器发射光脉冲并通过计算机采集信号:计算机控制激光器向布设在隧道中的分布式振动感测光缆中注入光脉冲,经过光的传输返回到激光探测器并传输
到分布式振动解调仪中。
[0156]
(
ⅵ
)计算机通过测量输入脉冲与接收到信号的时间延迟来判断异物侵限和周界侵入点的位置。
[0157]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0158]
本发明是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和 /或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和 /或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0159]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0160]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0161]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。