为每个车道生成链路的装置和方法
1.相关申请的交叉引用
2.本技术要求于2021年7月8日向韩国知识产权局提交的韩国专利申请第10-2021-0089975号的优先权的权益,其全部内容通过引用结合于此。
技术领域
3.本公开涉及用于为每个车道生成链路的装置和方法,并且更具体地,涉及用于当存在多个出口车道时为每个车道生成链路的装置和方法。
背景技术:
4.在通过探测车辆收集道路的交通信息的方法中,车辆在一个方向上行驶的路段可定义为道路链路(road link),并且穿过道路链路的车辆的平均速度可定义为交通速度。道路链路可大致分为根据车道划分的车道特定链路和未划分的一般链路。当通过探测车辆收集用于一般链路的速度时,无论在区段中进入多个出口车道的车辆的出口如何,都计算对应区段的平均速度。同时,当通过探测车辆收集每个车道的链路的速度时,可以计算根据在区段中进入多个出口车道的车辆的出口车道的平均速度,从而提高计算速度的可靠性。
5.在相同的条件下,在道路的所有区段中生成每个车道的常规链路(例如,生成从交叉口或交换(ic)到下个交叉口或ic的每个车道的链路)。因此,由于每个交叉口的道路形状不同,因此每个车道的链路不反映对应交叉口的形状。因此,需要开发解决上述问题的技术。
技术实现要素:
6.已经做出本公开以解决现有技术中出现的上述问题,同时保持由现有技术实现的优点。
7.本公开的一方面提供了一种用于当存在多个出口车道时为每个车道生成链路的装置和方法。
8.本公开的另一方面提供了一种用于为每个车道生成链路的装置和方法,该装置和方法能够提高每个车道的速度的准确度和可靠性。
9.本公开的又一个方面提供了用于为每个车道生成链路的装置和方法,该装置和方法能够解决当用于每个车道的常规链路比实际车辆队列短时不能适当地反映每个车道的速度的问题。
10.本公开的又一个方面提供了用于为每个车道生成链路的装置和方法,该装置和方法能够通过提高在道路上收集的车辆速度的准确度和可靠性来提高目的地的预期到达时间的质量。
11.本公开的又一个方面提供了用于为每个车道生成链路的装置和方法,该装置和方法能够共同并且自动地为每个车道生成反映道路形状的链路。
12.通过本公开构思要解决的技术问题不限于上述问题,并且本公开所属领域的技术
人员从以下描述中将清楚地理解本文中未提及的任何其他技术问题。
13.根据本公开的一方面,用于为每个车道生成链路的装置可包括:信息获取设备,从探测车辆获取关于探测车辆的速度的信息;以及处理器,基于探测车辆在出口方向上的速度差,确定用于沿着车道生成划分链路的区段。
14.根据实施方式,信息获取设备可以获取探测车辆的标识(id),并且处理器可以基于探测车辆的id对探测车辆的出口方向进行分类。
15.根据实施方式,处理器可基于探测车辆在出口方向上的速度差是否超过预设阈值来确定用于根据车道生成划分链路的区段。
16.根据实施方式,处理器可考虑所获取的关于探测车辆的速度的信息的数量是否超过预设阈值数来确定用于为每个车道生成链路的车道区段。
17.根据实施方式,处理器可以基于探测车辆的速度是否小于预设阈值速度来确定用于为每条车道生成链路的车道区段。
18.根据实施方式,处理器可基于探测车辆在相对于每个候选链路区段的出口方向上的速度差,确定基于进入多个出口车道的点在与前进到出口车道的方向相反的方向上顺次连接的一个或多个候选链路区段中,包括在用于根据车道生成划分链路的区段中的区段。
19.根据实施方式,处理器可从一个或多个候选链路区段中,过滤所获取的关于探测车辆在出口方向上的速度的信息的数量不超过预设阈值数的候选链路区段。
20.根据实施方式,处理器可从一个或多个候选链路区段中,过滤探测车辆在所有出口方向上的平均速度大于或等于预设阈值速度的候选链路区段。
21.根据实施方式,处理器可基于一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值是否超过预设阈值,确定包括在用于生成沿着车道的划分链路的区段中的区段。
22.根据实施方式,处理器可以允许在用于生成沿着车道的划分链路的区段中包括候选链路区段,在该候选链路区段中,在从多个出口车道前进的点起顺次连接的一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值超过预定阈值。
23.根据本公开的另一方面,一种为每个车道生成链路的方法包括:由信息获取设备从探测车辆获取关于探测车辆的速度的信息;以及由处理器基于探测车辆在出口方向上的速度差确定用于沿着车道生成划分链路的区段。
24.根据实施方式,该方法可进一步包括:由信息获取设备获取探测车辆的id;以及由处理器基于探测车辆的id对探测车辆的出口方向进行分类。
25.根据实施方式,由处理器确定区段可包括:由处理器基于探测车辆在出口方向上的速度差值是否超过预设阈值确定用于根据车道生成划分链路的区段。
26.根据实施方式,由处理器确定区段可以包括由处理器考虑所获取的关于探测车辆的速度的信息的数量是否超过预设阈值数来确定用于为每个车道生成链路的车道区段。
27.根据实施方式,由处理器确定区段可包括:由处理器基于探测车辆的速度是否小于预设阈值速度来确定用于为每个车道生成链路的车道区段。
28.根据实施方式,由处理器确定区段可包括:由处理器基于相对于每个候选链路区段探测车辆在出口方向上的速度差值,基于进入多个出口车道的点,在与前进到出口车道的方向相反的方向上顺次连接的一个或多个候选链路区段中,确定包括在用于根据车道生
成划分链路的区段中的区段。
29.根据实施方式,由处理器确定区段可包括:由处理器从一个或多个候选链路区段中,过滤所获取的关于探测车辆在出口方向上的速度的信息的数量不超过预设阈值数的候选链路区段。
30.根据实施方式,由处理器确定区段可包括:由处理器从一个或多个候选链路区段中,过滤探测车辆在所有出口方向上的平均速度大于或等于预设阈值速度的候选链路区段。
31.根据实施方式,由处理器确定区段可包括:由处理器基于一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值是否超过预设阈值来确定包括在用于沿着车道生成划分链路的区段中的区段。
32.根据实施方式,由处理器确定区段可以包括:由处理器允许在用于沿着车道生成划分链路的区段中包括候选链路区段,在该候选链路区段中,在从多个出口车道前进的点起顺次连接的一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值超过预设阈值。
附图说明
33.从以下结合附图的详细描述中,本公开的上述和其他目的、特征以及优点将变得更加显而易见:
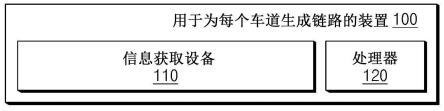
34.图1是示出根据本公开的实施方式的用于为每个车道生成链路的装置的框图;
35.图2是示出根据本公开的实施方式的在与前进至出口车道的方向相反的方向上顺次连接的一个或多个候选链路区段的示图;
36.图3是示出了根据本公开的实施方式的用于为每个车道生成链路的装置确定沿着车道生成划分的链路的区段的实例的示图;
37.图4是示出根据本公开的实施方式的用于为每个车道生成链路的装置确定沿着车道生成划分的链路的区段的另一个实例的示图;
38.图5是示出通过根据本公开的实施方式的用于为每个车道生成链路的装置确定沿着车道生成划分的链路的区段的过程的流程图;以及
39.图6是示出根据本公开的实施方式的为每个车道生成链路的方法的流程图。
具体实施方式
40.在下文中,将参照示例性附图详细描述本公开的一些实施方式。另外,在各附图的组件中附加附图标记时,在其他附图中显示相同或等同的组件的情况下,也标注相同的附图标记。此外,在描述本公开的实施方式时,当确定相关的已知配置或功能干扰本公开的实施方式的理解时,将省略相关的已知配置或功能的详细描述。
41.在描述根据本公开的实施方式的组件时,可以使用诸如第一、第二、a、b、(a)、(b)等的术语。这些术语仅旨在将组件与其他组件区分开,并且这些术语不限制组件的性质、顺序或次序。除非另有限定,否则本文使用的所有术语(包括技术和科学术语)具有与本公开所属领域的普通技术人员通常理解的含义相同的含义。将进一步理解,术语(诸如在通常使用的词典中定义的那些)应被解释为具有与它们在相关领域的上下文中的含义一致的含
义,并且将不以理想化或过于正式的意义来解释,除非本文中明确如此限定。
42.在下文中,将参照图1至图6详细地描述本公开的实施方式。
43.图1是示出根据本公开的实施方式的用于为每个车道生成链路的装置的框图。
44.参照图1,用于为每个车道生成链路的装置100可包括信息获取设备110和处理器120。
45.例如,用于为每个车道生成链路的装置100可设置在使用节点和链路收集或管理交通信息的服务器中,或者可实现为与服务器分离的独立装置。
46.信息获取设备110可从探测车辆获取关于探测车辆的速度的信息。
47.例如,信息获取设备110可以获取探测车辆的id。
48.例如,信息获取设备110可通过无线通信与在道路上行驶的探测车辆通信,并可实时地或以特定时间段从探测车辆接收包括探测车辆的速度的信息。
49.例如,信息获取设备110可以通过无线lan(wlan)、无线保真(wi-fi)、wi-fi直连、数字生活网络联盟(dlna)、无线宽带(wibro)、全球微波互联接入(wimax)、高速下行链路分组接入(hsdpa)、高速上行链路分组接入(hsupa)、长期演进(lte)、高级长期演进(lte-a)等从探测车辆接收包括探测车辆的速度的信息。
50.例如,信息获取设备110通过无线或有线通信连接到处理器120,并且可将从探测车辆获得的探测车辆的速度和id中的至少一个直接或间接地发送到处理器120。
51.处理器120可以电连接到信息获取设备110等,并且可以电控制每个组件。处理器120可以是执行软件命令的电路,从而执行稍后描述的各种数据的处理和计算。
52.处理器120可基于根据出口方向的探测车辆的速度差确定沿车道生成划分链路的区段。
53.作为实例,处理器120可基于探测车辆的id对探测车辆的出口方向进行分类。
54.例如,处理器120可根据在两个以上不同方向具有出口车道的交叉口处的探测车辆的id识别探测车辆沿着其前进的出口车道,计算在相同出口方向上前进到出口车道中的探测车辆的平均速度,并且基于根据出口方向的探测车辆的平均速度的差值确定沿着车道生成划分链路的区段。
55.例如,处理器120可基于探测车辆在出口方向上的速度差值是否超过预设阈值,来确定沿着车道生成划分链路的区段。
56.例如,处理器120可确定任意区段中探测车辆在出口方向上的平均速度的差值是否超过预设阈值,并且可确定探测车辆的平均速度的差值超过阈值的任意区段作为沿车道生成划分链路的区段。
57.例如,处理器120可考虑所获得的关于探测车辆的速度的信息的数量是否超过预设阈值数,来确定用于为每个车道生成链路的车道区段。
58.例如,处理器120可确定在任意区段中获取的关于探测车辆的速度的信息的数量是否超过预设阈值数。
59.例如,当在任意区段中获取的关于探测车辆的速度的信息的数量未超过预设阈值数时,因为该信息可能不具有速度的代表性和可靠性,处理器120可通过仅使用当获取的关于探测车辆的速度的信息的数量超过预设阈值数时的数据,来确定将要为每个车道生成链路的车道区段。
60.例如,处理器120可基于探测车辆的速度是否小于预设阈值速度,来确定用于为每个车道生成链路的车道区段。
61.例如,处理器120可确定任意区段中的探测车辆在出口方向上的平均速度是否小于预设阈值速度。
62.例如,当探测车辆在任意区段中的所有出口方向上的平均速度不小于预设阈值速度时,因为对应区段不是拥挤区段,对应区段中的速度差值可能是由于出口方向上的区别之外的原因。在这种情况下,处理器120可仅使用与探测车辆在至少一个出口方向上的平均速度小于预设阈值速度的任意区段对应的数据,使得处理器120确定为每个车道生成链路的车道区段。
63.例如,处理器120可基于探测车辆在相对于每个候选链路区段的出口方向上的速度差值,来确定包括在基于多个出口车道前进的点在与出口方向相反的方向上顺次连接的至少一个候选链路区段中沿着车道生成划分链路的区段中的区段。
64.例如,基于多个出口车道前进的点在与出口方向相反的方向上顺次连接的至少一个候选链路区段,可以包括与预设的现有链路相对应的区段,并且可以包括预设的特定数量的已连接的链路区段。
65.基于多个出口前进的点,进入出口车道的链路可以被定义为“来自链路”。
66.用于在与前进到“来自链路”的方向相反的方向连接的道路区段和用于在多个出口车道的方向延伸的道路区段的链路,可以被定义为队列链路。
67.例如,基于多个出口车道前进的点,在与前进至出口车道的方向相反的方向上顺次连接的至少一个候选链路区段可以包括与来自链路和队列链路相对应的区段。
68.例如,处理器120可实时或者以特定周期计算针对至少一个候选链路区段在出口方向上获得的探测车辆的平均速度。
69.例如,处理器120可在至少一个候选链路区段中,过滤在出口方向上获取的关于探测车辆的速度的信息的数量不超过预设阈值数的候选链路区段。
70.例如,处理器120可在至少一个候选链路区段中,过滤在出口方向上获取的关于探测车辆的速度的信息的数量小于5的候选链路区段。
71.在这种情况下,5的数量是用于说明目的的任意设置的数量,并且实际上可被设置为另一数量。
72.例如,因为当至少一个候选链路区段中在出口方向上获取的关于探测车辆的速度的信息的条数未超过预设阈值数时,速度可能不具有代表性和可靠性,所以处理器120可仅使用至少一个候选链路区段中在出口方向上获取的关于探测车辆的速度的信息的条数超过预设阈值数的候选链路区段的数据。
73.例如,处理器120可在至少一个候选链路区段中,过滤探测车辆在所有出口方向上的平均速度等于或大于预设阈值速度的候选链路区段。
74.例如,处理器120可在至少一个候选链路区段中,过滤探测车辆在所有出口方向上的平均速度为60km/h以上的候选链路区段。
75.在这种情况下,例如,60km/h的速度是任意设置的速度,并且实际上可被设置为其他速度。
76.例如,当探测车辆在至少一个候选链路区段中的所有出口方向上的平均速度等于
或大于预设阈值速度时,该区段不是拥挤区段。因为该区段不是拥挤区段,所以对应区段中的速度差值可能是由于出口方向上的区别之外的原因。处理器120可仅使用至少一个候选链路区段中的探测车辆在至少一个出口方向上的平均速度小于预设阈值速度的候选链路区段的数据。
77.例如,处理器120可基于至少一个候选链路区段中的探测车辆在出口方向上的平均速度的差值是否超过预设阈值速度,来确定包括生成沿着车道的划分链路的区段的区段。
78.例如,处理器120可在至少一个候选链路区段中,过滤在出口方向上获取的关于探测车辆的速度的信息的条数小于5的候选链路区段。在对至少一个候选链路区段中的探测车辆在所有出口方向上的平均速度等于或大于预设阈值速度的候选链路区段进行过滤之后,处理器120可基于其余候选链路区段的探测车辆在出口方向上的平均速度的差值是否超过预设阈值,确定包括在沿着车道生成划分链路的区段中的区段。
79.例如,处理器120可基于至少一个候选链路区段中的探测车辆在出口方向上的平均速度的差值是否超过10km/h,来确定包括在沿着车道生成划分链路的区段中的区段。
80.在这种情况下,例如,10km/h的速度是任意设置的速度,并且实际上可被设置为其他值。
81.例如,处理器120可将连接至少一个候选链路区段中探测车辆在出口方向上的平均速度的差值超过预设阈值的候选链路区段的区段,确定为沿着车道生成划分链路的区段。
82.例如,处理器120可允许在从多个出口车道前进的点起顺次连接的至少一个候选链路区段中探测车辆在出口方向上的平均速度超过预设阈值的候选链路区段包括在沿车道生成划分链路的区段中。
83.例如,处理器120可确定从多个出口车道前进的点起顺次连接的至少一个候选链路区段中的探测车辆在出口方向上的平均速度的差值是否超过预设阈值。然后,处理器120可将从多个出口车道前进的点到至少一个候选链路区段中探测车辆在出口方向上的平均速度的差值不超过预设阈值的先前候选链路区段的区段,设置为沿着车道生成划分链路的区段。
84.此外,处理器120可确定从多个出口车道前进的点起顺次连接的至少一个候选链路区段中探测车辆在出口方向上的平均速度的差值是否超过预设阈值。当直至最后候选链路区段的所有候选链路区段中在出口方向上的探测车辆的平均速度的差值超过预设阈值时,处理器120可将从多个出口车道前进的点到最后候选链路区段的区段设置为沿着车道生成划分链路的区段。
85.例如,处理器120可基于根据确定的车道生成划分链路的区段,来生成沿着车道划分的链路。
86.例如,处理器120可针对生成根据确定的车道划分链路的链路,生成沿着车道划分的链路,并在不是生成沿着车道划分的链路的区段的区段中生成未根据车道划分的一般链路。
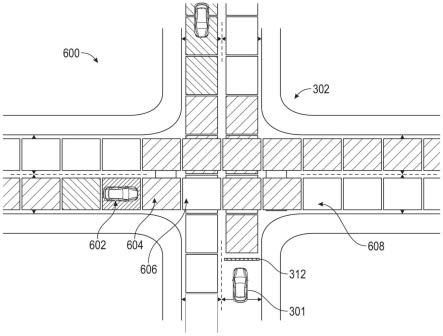
87.图2是示出根据本公开的实施方式的在与前进至出口车道的方向相反的方向上顺次连接的一个或多个候选链路区段的示图。
88.参考图2,可假设道路基于出口点200连接至两个出口车道。
89.对应于两个出口车道的链路可以被定义为至链路1 201和至链路2 202。
90.前进到两个出口车道的链路可以被定义为来自链路203。
91.在朝向出口点的行进方向上顺次连接至来自链路203的链路,可依次定义为队列链路1 204、队列链路2 205、队列链路3 206、队列链路4 207和队列链路5 208。
92.举例说明了5个队列链路,但是可以定义除5个之外的许多队列链路。
93.基于对应于来自链路203、队列链路1 204、队列链路2 205、队列链路3 206、队列链路4 207和队列链路5 208的区段的探测车辆在出口方向上的平均速度的差值是否超过预设阈值,用于为每个车道生成链路的装置100可以确定沿车道生成划分链路的区段。
94.例如,用于为每个车道生成链路的装置100可以确定针对对应于来自链路203、队列链路1 204、队列链路2 205、队列链路3 206、队列链路4 207和队列链路5 208的区段的探测车辆在出口方向上的平均速度的差值是否超过预设阈值。
95.按照来自链路203、队列链路1 204、队列链路2 205、队列链路3 206、队列链路4 207和队列链路5 208的顺序,随着距离出口点的距离增加,探测车辆在出口方向上的平均速度的差值可减小。
96.例如,用于为每个车道生成链路的装置100可以针对对应于来自链路203、队列链路1 204、队列链路2 205、队列链路3 206、队列链路4 207和队列链路5 208的区段,确定探测车辆在出口方向上的平均速度的差值是否超过预设阈值。此外,用于为每个车道生成链路的装置100可将直至与探测车辆在从出口点起的第一出口方向上的平均速度之间的差值不超过预设阈值的链路的紧挨着的前一链路对应的区段的区段,确定为生成沿着车道划分的链路的区段。
97.图3是示出了根据本公开的实施方式的用于为每个车道生成链路的装置确定生成沿着车道划分的链路的区段的实例的示图。
98.例如,用于为每个车道生成链路的装置100可以从探测车辆获得在道路上沿acheon ic到gayang bridge junction的方向上行进的探测车辆的速度。
99.出口车道可以从seongsu bridge的北端点划分。前进出口车道的来自链路可具有唯一编号2046547,并且长度可为133m。
100.在songsu bridge的北端点分割的出口车道可以包括对应于具有唯一编号2053738的至链路的主道路和对应于具有唯一编号2053898的至链路的出口车道。
101.从出口点到133m的区段可以被定义为来自链路。
102.从出口点到连接到来自链路的311m的区段可以被定义为队列链路1。
103.从出口点到连接到队列链路1的646m的区段可被定义为队列链路2。
104.从出口点到连接到队列链路2的1455m的区段可以被定义为队列链路3。
105.从出口点到连接到队列链路3的1604m的区段可以被定义为队列链路4。
106.从出口点到连接到队列链路4的1652m区段可被定义为队列链路5。
107.从出口点到连接到队列链路5的1905m的区段可以被定义为队列链路6。
108.从出口点到连接到队列链路6的2030m的区段可以被定义为队列链路7。
109.从出口点到连接到队列链路7的2461m的区段可以被定义为队列链路8。
110.从出口点到连接到队列链路8的4081m的区段可以被定义为队列链路9。
111.从出口点到连接到队列链路9的4398m的区段可以被定义为队列链路10。
112.例如,用于为每个车道生成链路的装置100可以在2020年2月25日8:45获取探测车辆的速度。
113.前进到获得的来自链路的主道路的探测车辆的平均速度可以是43.38km/h,前进到出口车道的探测车辆的平均速度可以是25.24km/h,并且速度差可以是18.23km/h。
114.前进到队列链路1的主道路的探测车辆的平均速度可以是48.31km/h,前进到出口车道的探测车辆的平均速度可以是12.90km/h,并且速度差可以是35.40km/h。
115.前进到队列链路2的主道路的探测车辆的平均速度可以是57.68km/h,前进到出口车道的探测车辆的平均速度可以是41.33km/h,并且速度差可以是16.35km/h。
116.前进到队列链路3的主道路的探测车辆的平均速度可以是48.45km/h,前进到出口车道的探测车辆的平均速度可以是33.55km/h,并且速度差可以是14.91km/h。
117.前进到队列链路4的主道路的探测车辆的平均速度可以是48.24km/h,前进到出口车道的探测车辆的平均速度可以是23.61km/h,并且速度差可以是24.64km/h。
118.关于前进到队列链路5的主道路的探测车辆的平均速度的信息被过滤,并且前进到出口车道的探测车辆的平均速度可以是40.50km/h。
119.关于前进到队列链路6的主道路的探测车辆的平均速度的信息可以被过滤,并且前进到出口车道的探测车辆的平均速度可以是58.63km/h。
120.前进到队列链路7的主道路的探测车辆的平均速度可以是53.99km/h,前进到出口车道的探测车辆的平均速度可以是52.29km/h,并且速度差可以是1.70km/h。
121.前进到队列链路8的主道路的探测车辆的平均速度可以是45.05km/h,前进到出口车道的探测车辆的平均速度可以是35.70km/h,并且速度差可以是9.35km/h。
122.前进到队列链路9的主道路的探测车辆的平均速度可以是25.93km/h,前进到出口车道的探测车辆的平均速度可以是22.58km/h,并且速度差可以是3.35km/h。
123.前进到队列链路10的主道路的探测车辆的平均速度可以是10.78km/h,前进到出口车道的探测车辆的平均速度可以是10.20km/h,并且速度差可以是0.58km/h。
124.例如,用于为每个车道生成链路的装置100可包括对应于以下情况的链路,在该情况中,从出口点起顺次,根据所述每小时的数据采样,探测车辆在至少一个出口方向上的平均速度在出口方向上小于60km/h,所获得的关于所述探测车辆在所述出口方向上的速度的信息的条数是5以上,并且在用于生成沿车道划分的链路的集合中,探测车辆在所述出口方向上的平均速度的差值为10km/h以上。
125.包括在集合中的链路的数量是0的数据采样的数量可以是3162。包括在集合中的链路的数量是1的数据采样的数量可以是127。包括在集合中的链路的数量是2的数据采样的数量可以是97。包括在集合中的链路的数量是3的数据采样的数量可以是57。包括在集合中的链路的数量是4的数据采样的数量可以是11。包括在集合中的链路的数量是5的数据采样的数量可以是2。
126.在这种情况下,存在具有集合中包括的最多5个链路的数据采样,使得5个链路从出口点连接至1604m的区段可被确定为生成沿车道划分的链路的区段。
127.图4是示出了根据本公开的实施方式的用于为每个车道生成链路的装置确定生成沿着车道划分的链路的区段的另一实例的示图。
128.例如,用于为每个车道生成链路的装置100可以获得沿从gae-hwa ic到gang-il ic的方向在道路上行驶的探测车辆的速度。
129.可以在olympic bridge(奥林匹克大桥)的南端分割出口车道。前进到出口车道的来自链路可以具有唯一编号3808936,并且长度可以是268m。
130.在olympic bridge的南端分割的出口车道可以包括与具有唯一编号3808935的至链路对应的主道路和与具有唯一编号4028900的至链路对应的出口车道。
131.从出口点到268m的区段可以被定义为来自链路。
132.从出口点到连接到来自链路的440m的区段可以被定义为队列链路1。
133.从出口点到连接到队列链路1的559m的区段可以被定义为队列链路2。
134.从出口点到连接到队列链路2的783m的区段可以被定义为队列链路3。
135.从出口点到连接到队列链路3的872m的区段可以被定义为队列链路4。
136.从出口点到连接到队列链路4的926m的区段可以被定义为队列链路5。
137.从出口点到连接到队列链路5的1224m的区段可以被定义为队列链路6。
138.从出口点到连接到队列链路6的1750m的区段可以被定义为队列链路7。
139.从出口点到连接到队列链路7的2292m的区段可以被定义为队列链路8。
140.从出口点到连接到队列链路8的2670m的区段可以被定义为队列链路9。
141.从出口点到连接到队列链路9的3063m区段可以被定义为队列链路10。
142.例如,用于为每个车道生成链路的装置100可以在2020年2月24日10:50获取探测车辆的速度。
143.前进到获得的来自链路的主道路的探测车辆的平均速度可以是56.52km/h,前进到出口车道的探测车辆的平均速度可以是39.90km/h,并且速度差可以是16.62km/h。
144.前进到队列链路1的主道路的探测车辆的平均速度可以是54.07km/h,前进到出口车道的探测车辆的平均速度可以是41.85km/h,并且速度差可以是12.22km/h。
145.前进到队列链路2的主道路的探测车辆的平均速度可以是57.98km/h,前进到出口车道的探测车辆的平均速度可以是54.05km/h,并且速度差可以是3.93km/h。
146.关于前进到队列链路3的主道路的探测车辆的平均速度的信息可以被过滤,并且前进到出口车道的探测车辆的平均速度可以是55.98km/h。
147.关于前进到队列链路4的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
148.前进到队列链路5的主道路的探测车辆的平均速度可以是57.14km/h,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
149.关于前进到队列链路6的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
150.关于前进到队列链路7的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
151.关于前进到队列链路8的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
152.关于前进到队列链路9的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
153.关于前进到队列链路10的主道路的探测车辆的平均速度的信息可以被过滤,并且关于前进到出口车道的探测车辆的平均速度的信息可以被过滤。
154.例如,用于为每个车道生成链路的装置100可包括对应于以下情况的链路,在该情况中,从出口点起顺次,根据所述每小时的数据采样,探测车辆在至少一个出口方向上的平均速度在出口方向上小于60km/h,所获得的关于所述探测车辆在所述出口方向上的速度的信息的条数是5以上,并且在用于生成沿车道划分的链路的集合中,所述探测车辆在所述出口方向上的平均速度的差值为10km/h以上。
155.包括在集合中的链路的数量是0的数据采样的数量可以是3442。包括在集合中的链路的数量是1的数据采样的数量可以是11。包括在集合中的链路的数量是2的数据采样的数量可以是4。包括在集合中的链路的数量是3的数据采样的数量可以是0(零)。包括在集合中的链路的数量是4的数据采样的数量可以是0(零)。包括在集合中的链路的数量是5的数据采样的数量可以是0(零)。
156.在这种情况下,存在具有集合中包括的最多2个链路的数据采样,使得2个链路从出口点连接到440m的区段可被确定为生成沿车道划分的链路的区间。
157.图5是示出通过根据本公开的实施方式的用于为每个车道生成链路的装置确定生成沿着车道划分的链路的区间的过程的流程图。
158.参考图5,在s501中,用于为每个车道生成链路的装置100可以选择来自链路(from link)。
159.例如,用于为每个车道生成链路的装置100可以选择从出口点到出口车道的链路作为来自链路。
160.例如,用于为每个车道生成链路的装置100可以选择来自链路作为初始确认链路。
161.在s502中,用于为每个车道生成链路的装置100可以在s501中选择来自链路之后选择后链路范围。
162.例如,用于为每个车道生成链路的装置100可选择沿与在出口点方向上行进的方向相反的方向通过预设数量链路的范围中的链路并且前进到来自链路,作为后链路。
163.在选择后链路范围s502之后,在s503中,用于为每个车道生成链路的装置100可为每个链路实时生成探测车辆在出口方向上的速度。
164.例如,用于为每个车道生成链路的装置100可从探测车辆获得关于探测车辆的速度的信息,并且为每个链路实时计算探测车辆在出口方向上的平均速度。
165.在s503中为每个链路实时生成探测车辆在出口方向上的速度之后,在s504中,用于为每个车道生成链路的装置100可以确定相对于检查链路是否出现每个出口车道的速度差值。
166.例如,用于为每个车道生成链路的装置100可以确定针对检查链路的每个出口车道的速度差值是否超过预设阈值。
167.在s504中确定是否针对检查链路出现每个出口车道的速度差值之后,在s507中,当确定针对检查链路没有出现每个出口车道的速度差时,用于为每个车道生成链路的装置100可以为每个车道生成到紧接在检查链路之前的链路的链路。
168.例如,用于为每个车道生成链路的装置100可将从出口点到紧挨在检查链路之前的链路的区段确定为为每个车道生成链路的区段,并且可为所确定的区段为每个车道生成
链路。
169.在s504中确定是否针对检查链路出现每个出口车道的速度差值之后,当在s505中确定针对检查链路出现每个出口车道的速度差值时,用于生成每个车道的链路的装置100可以确定检查链路是否是后链路中的最后链路。
170.例如,用于为每个车道生成链路的装置100可确定检查链路是否是在后链路中与朝向出口车道的方向相反的方向上的最后链路。
171.在s505中确定检查链路是否是后链路中的与朝向出口车道的方向相反的方向上的最后链路之后,在s508中,当确定检查链路是后链路中的与朝向出口车道的方向相反的方向上的最后链路时,用于为每个车道生成链路的装置100可以为每个车道生成到最后链路的链路。
172.例如,用于为每个车道生成链路的装置100可将从出口点到最后链路的区段确定为为每个车道生成链路的区段,并且可针对所确定的区段为每个车道生成链路。
173.在s505中确定检查链路是否是后链路中的最后链路之后,在s506中,当确定检查链路不是后链路中的最后链路时,用于为每个车道产生链路的装置100可将检查链路移动到下一个后链路。
174.作为实例,当确定检查链路不是后链路中的最后链路时,用于为每个车道生成链路的装置100可以选择现有的检查链路和在与朝向出口车道的方向相反的方向上链路的后链路作为新的检查链路。
175.在s506中移动到下一个后链路之后,用于为每个车道生成链路的装置100可返回至s504以确定相对于检查链路是否出现用于每个出口车道的速度差值。
176.图6是示出根据本公开的实施方式的为每个车道生成链路的方法的流程图。
177.参考图6,为每个车道生成链路的方法可包括在s610中从探测车辆获取关于探测车辆的速度的信息,并且在s620中基于探测车辆在出口方向上的速度差值确定用于沿着车道生成划分链路的区间。
178.在s610中从探测车辆获取关于探测车辆的速度的信息可以由信息获取设备110执行。
179.例如,为每个车道生成链路的方法可以进一步包括由信息获取设备110获取探测车辆的id。
180.例如,为每个车道生成链路的方法可进一步包括由处理器120基于探测车辆的id对探测车辆的出口方向进行分类。
181.在s620中,基于探测车辆在出口方向上的速度差值确定用于沿着车道生成划分链路的区段可由处理器120执行。
182.例如,在s620中确定用于沿着车道生成划分链路的区段可以包括:由处理器120基于探测车辆在出口方向上的速度差值是否超过预设阈值来确定用于根据车道生成划分链路的区段。
183.例如,在s620中确定用于生成划分链路的区段可以包括:由处理器120考虑所获取的关于探测车辆的速度的信息的数量是否超过预设阈值数,来确定用于为每个车道生成链路的车道区段。
184.例如,在s620中确定用于生成划分链路的区段可以包括由处理器120基于探测车
辆的速度是否小于预设阈值速度,来确定用于为每个车道生成链路的车道区段。
185.例如,在s620中确定用于生成划分链路的区段可以包括:基于探测车辆在相对于每个候选链路区段在出口方向上的速度差值,在基于进入多个出口车道的点与前进至出口车道的方向相反的方向上顺次连接的一个或多个候选链路区段中根据车道,由处理器120确定包括在用于生成划分链路的区段中的区段。
186.例如,由处理器确定包括在用于生成沿着车道的链路的区段中的区段可包括:由处理器120从一个或多个候选链路区段中,过滤所获取的关于探测车辆在出口方向上的速度的信息的数量不超过预设阈值数的候选链路区段。
187.例如,由处理器确定包括在用于生成沿着车道的链路的区段中的区段可包括由处理器120从一个或多个候选链路区段中,过滤探测车辆在所有出口方向上的平均速度大于或等于预设阈值速度的候选链路区段。
188.例如,由处理器确定包括在用于生成沿着车道的链路的区段中的区段可包括:由处理器120基于一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值是否超过预设阈值,来确定包括在用于生成沿着车道的划分链路的区段中的区段。
189.例如,由处理器确定包括在用于生成沿着车道的链路的区段中的区段可以包括:由处理器1200允许在用于生成沿着车道划分的链路的区段中包括候选链路区段,其中,在从多个出口车道前进的点起顺次连接的一个或多个候选链路区段中探测车辆在出口方向上的平均速度的差值超过预设阈值。
190.因此,结合本公开的实施方式描述的方法或算法的过程可由处理器执行的硬件、软件模块或其组合直接实现。软件模块可驻留在存储介质(即,存储器和/或存储装置)中,例如ram、快闪存储器、rom、eprom、eeprom、寄存器、硬盘、固态驱动器(ssd)、可分离磁盘或cd-rom。
191.示范性存储介质耦合到处理器,并且处理器可从存储介质读取信息并且可在存储介质中写入信息。在另一方法中,存储介质可与处理器集成。处理器和存储介质可存在于专用集成电路(asic)中。asic可驻留在用户终端中。在另一种方法中,处理器和存储介质可作为单独组件驻留在用户终端中。
192.下面将描述根据本公开的用于为每个车道生成链路的装置和方法的效果。
193.根据本公开的至少一个实施方式,可以提供一种用于当存在多个出口车道时为每个车道生成链路的装置和方法。
194.此外,根据本公开的至少一个实施方式,可以提供一种用于为各个车道生成链路的装置和方法,该装置和方法能够提高各个车道的速度的准确度和可靠性。
195.此外,根据本公开的至少一个实施方式,可以提供用于为每个车道生成链路的装置和方法,该装置和方法能够解决当用于每个车道的常规链路比实际车辆队列短时不能适当地反映每个车道的速度的问题。
196.此外,根据本公开的至少一个实施方式,可以提供用于为每个车道生成链路的装置和方法,该装置和方法能够通过提高在道路上收集的车辆速度的准确性和可靠性而提高目的地的预期到达时间的质量。
197.此外,根据本公开的至少一个实施方式,可以提供用于为每个车道生成链路的装置和方法,该装置和方法能够共同并且自动地为反映道路形状的每个车道生成链路。
198.此外,可以提供通过本公开直接或间接理解的各种效果。
199.尽管出于说明性的目的已描述了本公开的示例性实施方式,但本领域技术人员将认识到,在不背离本公开的范围和精神的情况下,各种修改、添加和替换是可行的。
200.因此,提供本公开中公开的示例性实施方式是为了描述起见,而不是限制本公开的技术概念,并且应当理解,这些示例性实施方式并不旨在限制本公开的技术概念的范围。本发明的保护范围应以所附权利要求的保护范围为准,等同范围内的所有技术构思均应以所附权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。