1.本实用新型属于船舶行业中的照明用电设备技术领域,具体涉及一种船用激光探照灯的控制电路。
背景技术:
2.随着船舶照明技术的发展,激光探照灯被逐步应用在了海上执法、海上搜救以及远距离照明等方面。激光灯容易配光,发光面更接近于理想光源,具有体积小、重量轻、照射距离远、光功率密度高、便于维护等优点。传统的激光探照灯在使用过程中针对水平方向和竖直方向都需要进行调节,由于采用开关量控制,控制线繁多,在与控制室的交互过程中,存在电磁干扰,极易导致控制失效。为了减少接线的繁杂性,提高控制的有效性,本技术人作了有益的设计。通过自动控制,通信交互的方式来调节灯体的探照方向,下面介绍的技术方案就是在这种背景下产生的。
技术实现要素:
3.本实用新型的目的在于提供一种结构简单合理,控制稳定性高的船用激光探照灯控制电路。
4.本实用新型的目的是这样来达到的,一种船用激光探照灯的控制电路,所述的船用激光探照灯包括灯体和支承灯体的云台,所述的云台由步进电机驱动而使灯体在水平方向及垂直方向上转动,所述的控制电路包括mcu电路以及用于将mcu电路的电压控制信号转换成步进电机所需要的脉冲信号和方向信号的步进电机输出驱动电路,特点是:所述的控制电路还包括外部通信电路及遥控输入电路,所述的外部通信电路分别与频闪控制单元、云台方向控制单元、调焦控制单元以及mcu电路通信连接,将频闪控制单元、云台方向控制单元及调焦控制单元发出的控制命令交互给mcu电路,所述的遥控输入电路与mcu电路电连接,并具有连接遥控器的遥控接口,用于将遥控器的遥控信号传递给mcu电路以实现对灯体的外部无线遥控。
5.在本实用新型的一个具体的实施例中,所述的步进电机输出驱动电路包括电阻r5、r6、r7、r8、光耦u2以及三极管q1,所述的光耦u2采用el3h7,光耦u2的1脚连接电阻r5的一端,光耦u2的2脚为所述的mcu电路的连接端,光耦u2的4脚连接电阻r6的一端和电阻r7的一端,电阻r7的另一端连接三极管q1的基极,三极管q1的集电极连接电阻r8的一端并构成步进电机连接端,电阻r5的另一端接 3.3v直流电源,三极管q1的发射极和电阻r6的另一端共同接 24v直流电源,光耦u2的3脚和电阻r8的另一端共同接地,所述的步进电机输出驱动电路有四路,分别向步进电机传递水平方向上的方向信号和脉冲信号以及垂直方向上的方向信号和脉冲信号。
6.在本实用新型的另一个具体的实施例中,所述的外部通信电路包括通信芯片u3、电容c7、稳压二极管dz1、dz2以及电阻r9,所述的通信芯片u3采用sp3485,通信芯片u3的2脚和3脚连接,并共同连接所述的mcu电路,通信芯片u3的1脚和4脚分别连接mcu电路,通信芯
片u3的6脚与电阻r9的一端以及稳压二极管dz2的负极连接,通信芯片u3的7脚与电阻r9的另一端以及稳压二极管dz1的负极连接,通信芯片u3的8脚与电容c7的一端共同接 3.3v直流电源,通信芯片u3的5脚、稳压二极管dz1的正极以及稳压二极管dz2的正极共同接地,所述的外部通信电路有两路,其中一路中的通信芯片u3的6脚、7脚与频闪控制单元、云台方向控制单元通信连接,另一路中的通信芯片u3的6脚和7脚与调焦控制单元通信连接。
7.在本实用新型的又一个具体的实施例中,还包括限位传感器电路,所述的限位传感器电路包括电阻r10、r11以及光耦u4,所述的光耦u4采用el3h7,光耦u4的1脚连接电阻r10的一端,光耦u4的2脚接至云台的限位开关,光耦u4的4脚连接电阻r11的一端并共同连接至所述的mcu电路,电阻r10的另一端接 5v直流电源,电阻r11的另一端接 3.3v直流电源,所述的限位传感器电路具有四路,分别对应云台的左、右、上、下四个极限位置信号,将该四个极限位置信号传递至mcu电路。
8.在本实用新型的再一个具体的实施例中,所述的遥控输入电路包括光耦u5、电阻r12、r13、r14以及二极管d1,所述的光耦u5采用el3h7,光耦u5的1脚连接电阻r12的一端和电阻r13的一端,电阻r12的另一端接二极管d1的负极,二极管d1的正极接遥控器的控制按键,获取遥控信号,光耦u5的4脚接电阻r14的一端,并共同连接至所述的mcu电路,电阻r14的另一端接 3.3v直流电源,光耦u5的2脚、3脚以及电阻r13的另一端共同接地,所述的遥控输入电路具有九路,分别对应以下九种针对探照灯运行的遥控信号:照明开、信号开、云台向上、云台向下、云台向左、云台向右、光源向前调焦、光源向后调焦及光源频闪。
9.在本实用新型的还有一个具体的实施例中,还包括遥控电源控制电路,所述的遥控电源控制电路包括电阻r15、r16、r17、r18、三极管q2以及光耦u6,所述的光耦u6采用el3h7,光耦u6的1脚连接电阻r15的一端,电阻r15的另一端与直流电源3.3v连接。光耦u6的2脚连接所述的mcu电路,光耦u6的4脚与电阻r16的一端及电阻r17的一端连接,电阻r17的另一端接三极管q2的基极,三极管q2的集电极与电阻r18的一端连接并共同连接至遥控器,三极管q2的发射极与电阻r16的另一端共同接 24v直流电源,光耦u6的3脚与电阻r18的另一端共同接地。
10.在本实用新型的进而一个具体的实施例中,还包括第一电源电路和第二电源电路,所述的第一电源电路用于将 24v直流电源转换成 5v直流电源为限位传感器电路进行供电,所述的第二电源电路用于将 24v直流电源转换成 3.3v直流电源,为所述的mcu电路、步进电机输出驱动电路、外部通信电路、限位传感器电路、遥控输入电路以及遥控电源控制电路进行供电。
11.在本实用新型的更而一个具体的实施例中,还包括第三电源电路,所述的第三电源电路包括光耦u8、电阻r22、r23、r24、二极管d3、三极管q3以及继电器k,所述的光耦u8采用el3h7,光耦u8的1脚连接电阻r22的一端,光耦u8的2脚接所述的mcu电路,光耦u3的3脚连接电阻r23的一端和电阻r24的一端,电阻r24的另一端接三极管q3的基极,三极管q3的集电极连接二极管d3的负极以及继电器k线圈的一端,电阻r22的另一端接 3.3v直流电源,光耦u8的4脚及三极管q3的发射极共同接 5v直流电源,继电器k的com端接 24v直流电源,继电器k的常闭触点悬空,常开触点与所述的步进电机输出驱动电路和遥控电源控制电路连接。
12.本实用新型由于采用了上述结构,通过自动控制,通信交互的方式来调节灯体的探照方向,与现有技术相比,具有的有益效果是:电连接结构简单,简化了控制线的接线;在
与控制室的交互过程中,不受电磁干扰影响,提高了控制的有效性及稳定性;通过配设遥控器接口,可实现灯体除自动控制外的外部无线遥控控制。
附图说明
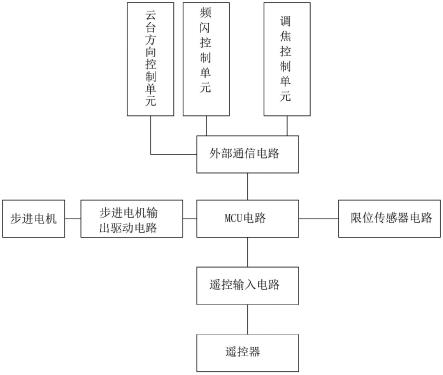
13.图1为本实用新型的原理框图。
14.图2为本实用新型所述的mcu电路的电连接示意图。
15.图3为本实用新型所述的步进电机输出驱动电路的电连接示意图。
16.图4为本实用新型所述的外部通信电路的电连接示意图。
17.图5为本实用新型所述的限位传感器电路的电连接示意图。
18.图6为本实用新型所述的遥控输入电路的电连接示意图。
19.图7为本实用新型所述的遥控电源控制电路的电连接示意图。
20.图8为本实用新型所述的第一电源电路的电连接示意图。
21.图9为本实用新型所述的第二电源电路的电连接示意图。
22.图10为本实用新型所述的第三电源电路的电连接示意图。
具体实施方式
23.下面结合附图对本实用新型的具体实施方式详细描述,但对实施例的描述不是对技术方案的限制,任何依据本实用新型构思作形式而非实质的变化都应当视为本实用新型的保护范围。
24.在下面描述中凡是涉及上、下、左、右、前和后的方向性(或者称方位性)的概念均是针对正在被描述的图所处的位置状态而言的,目的在于方便公众理解,因而不能将其理解为对本实用新型提供的技术方案的特别限定。
25.请参阅图1,本实用新型涉及一种船用激光探照灯的控制电路,是对现有激光探照灯的控制方式作了改进,不影响激光探照灯自身结构,所述的船用激光探照灯包括灯体和支承灯体的云台,所述的云台由步进电机驱动而使灯体在水平方向及垂直方向上转动,水平方向上为左右转向,垂直方向上为上下转向。所述的控制电路包括mcu电路、步进电机输出驱动电路、外部通信电路、限位传感器电路及遥控输入电路,所述的步进电机输出驱动电路、外部通信电路、限位传感器电路及遥控输入电路分别与mcu电路连接,所述的外部通信电路外接激光探照灯的频闪控制单元、云台方向控制单元及调焦控制单元。所述的mcu电路用于提供步进电机的脉冲信号和方向信号,所述的步进电机输出驱动电路用于将mcu电路的电压控制信号转换成步进电机所需要的脉冲信号和方向信号。外部通信电路与频闪控制单元、云台方向控制单元及调焦控制单元进行通信,将频闪控制单元、云台方向控制单元和调焦控制单元给出的控制命令交互给mcu电路。所述的频闪控制单元、云台方向控制单元和调焦控制单元为现有激光探照灯控制系统中的常规配置,此处不再展开描述。限位传感器电路用于采集云台在水平方向和竖直方向的极限位置信号,而后发送给mcu电路。mcu电路处理通信数据和限位信号,由此来保证云台的转动可靠。所述的遥控输入电路具有连接遥控器的遥控接口,用于将遥控器的遥控信号传递给mcu电路,以实现灯体除自动控制外的外部遥控控制。应用时,设有该控制电路的控制板可在灯源配电箱内。
26.请参阅图2,所述的mcu电路包括单片机u1、电阻r1~r4、晶振y1、电容c1~c6、发光
二极管led1以及复位开关sw1,其中,电阻r2、电容c2、c3以及晶振y1构成晶振电路,电容c5、电阻r4及复位开关sw1构成复位电路。所述的单片机u1采用gd32f303re,为本控制电路的核心。
27.请参阅图3,所述的步进电机输出驱动电路有四路,分别向步进电机传递水平方向上的方向信号和脉冲信号以及垂直方向上的方向信号和脉冲信号。所述的步进电机输出驱动电路包括电阻r5、r6、r7、r8、光耦u2以及三极管q1,其中,所述的光耦u2采用el3h7,构成电气隔离电路,具有一定抗干扰作用,所述的三极管q1为驱动三极管。光耦u2的2脚为所述的mcu电路的连接端,四路步进电机输出驱动电路中的光耦u2的2脚分别接所述单片机u1的2、62、61、59脚。三极管q1的集电极连接电阻r8的一端并构成步进电机连接端,图上dx(水平方向信号)、px(水平脉冲信号)、dy(垂直方向信号)、py(垂直脉冲信号)分别对应四路步进电机输出驱动电路的输出。
28.请参阅图4,所述的外部通信电路包括通信芯片u3、电容c7、稳压二极管dz1、dz2以及电阻r9,所述的通信芯片u3采用sp3485,稳压二极管dz1、dz2通过吸收外部干扰信号来保证通信的稳定。外部通信电路具有两路,分别用于实现频闪控制单元、云台方向控制单元与mcu电路之间,以及调焦控制单元与mcu电路之间的通信。在一路外部通信电路中,通信芯片u3的1脚连接所述的单片机u1的43脚,通信芯片u3的2脚和3脚连接,并共同连接单片机u1的45脚,通信芯片u3的4脚连接所述的单片机u1的42脚,通信芯片u3的6、7脚与频闪控制单元及云台方向控制单元通信连接,此处,频闪控制单元及云台方向控制单元并联连接,两者共用一个通信接口;在另一路外部通信电路中,通信芯片u3的1脚连接所述的单片机u1的30脚,通信芯片u3的2脚和3脚连接,并共同连接单片机u1的27脚,通信芯片u3的4脚连接所述的单片机u1的29脚,通信芯片u3的6、7脚与调焦控制单元通信连接。
29.请参阅图5,所述的限位传感器电路具有四路,分别对应云台的左、右、上、下四个极限位置,将云台转动至该四个极限位置后对应的检测信号转换成单片机u1可识别的逻辑信号并传递至mcu电路。所述的限位传感器电路包括电阻r10、r11以及光耦u4,所述的光耦u4采用el3h7,用于电气隔离。在具体应用时,四个限位传感器电路中的光耦u4的2脚共同通过一云台插口连接云台的限位开关,获取相应的极限信号,图上的ll、lr、lu、ld分别为左、右、上、下四个极限位置信号,此信号使单片机u1停止输出步进电机运转脉冲,从而制停云台转动。四个光耦u2的4脚分别接单片机u1的51、53、54、52脚。
30.请参阅图6,所述的遥控输入电路包括光耦u5、电阻r12、r13、r14以及二极管d1,所述的光耦u5采用el3h7,同样是为了电气隔离。在本实施例中,为对应遥控器上不同的功能按钮,所述遥控输入电路具有九路,分别对应以下九种针对探照灯运行的遥控操作:照明开、信号开、云台向上、云台向下、云台向左、云台向右、光源向前调焦、光源向后调焦及光源频闪。该九路遥控输入电路中二极管d1的正极共同连接至一遥控器插座,遥控器可直接插设在该遥控器插座上,实现与遥控输入电路的电连接。九路遥控输入电路中的光耦u5的4脚分别接所述单片机u1的39、38、37、25、24、11、10、9、8脚。
31.请参阅图7,所述的遥控输入电路还配备有遥控电源控制电路,所述的遥控电源控制电路包括电阻r15、r16、r17、r18、三极管q2以及光耦u6,所述的光耦u6采用el3h7。光耦u6的2脚连接所述的单片机u1的40脚,三极管q2的集电极与电阻r18的一端连接并共同连接至遥控器。mcu电路上电后,通过对控制室发送过来的数据进行解析,来确定是用外部遥控控
制还是控制室摇杆控制来实现云台的转向,当需要外部遥控控制时,该遥控电源控制电路根据单片机u1的指令来执行对遥控输入电路的上电。
32.请参阅图8和图9,本实用新型还包括第一电源电路和第二电源电路,所述的第一电源电路包括二极管d2、稳压二极管dz3、电容c8、c9、电阻r19、r20、发光二极管led2及稳压芯片v1,所述的稳压芯片v1为7805,该第一电源电路将 24v直流电源转换成 5v直流电源为限位传感器电路进行供电。所述的第二电源电路包括电源模块u7、电容c10、c11、c12、电感l1、电阻r21以及发光二极管led3,所述的电源模块u7采用wrb2403-1wr2,
33.电感l1和电容c10用于输入滤波,电容c11和电容c12用于输出滤波。该第二电源电路用于将 24v直流电源转换成 3.3v直流电源,为所述的mcu电路、步进电机输出驱动电路、外部通信电路、限位传感器电路、遥控输入电路以及遥控电源控制电路进行供电。
34.请参阅图10,本实用新型还包括第三电源电路,所述的第三电源电路包括光耦u8、电阻r22、r23、r24、二极管d3、三极管q3以及继电器k,所述的光耦u8采用el3h7,用于电气隔离及抗干扰。光耦u8的2脚接所述的单片机u1的58脚,继电器k的com端接 24v直流电源,继电器k的常闭触点悬空,常开触点与所述的步进电机输出驱动电路和遥控电源控制电路连接。当单片机u1输出高电平时,三极管q3输出高电平使继电器k1线圈导通,继电器k1的com端从常闭触点切换至常开触点,输出 24v直流电源驱动外部交流接触器工作,使控制电路上电运行。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。