1.本实用新型实施例涉及机器人技术领域,具体涉及一种灵活性高的工业施工用机器人。
背景技术:
2.现有技术中,工业施工用机器人在使用时其灵活性有所欠缺,不方便做出灵活的动作,导致后期在使用时存在一定的局限性,降低了机器人的适用范围。
技术实现要素:
3.为此,本实用新型实施例提供一种灵活性高的工业施工用机器人,以解决现有技术中的问题。
4.为了实现上述目的,本实用新型的实施方式提供如下技术方案:
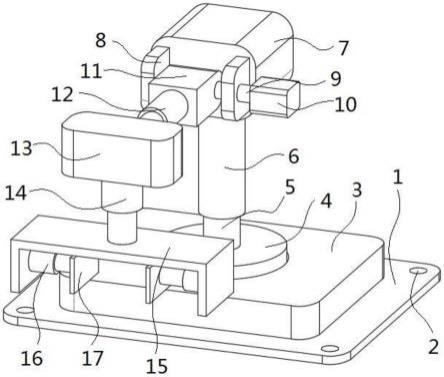
5.一种灵活性高的工业施工用机器人,包括底板、安装座和旋转电机,所述底板上表面周侧均设置有安装孔,所述安装座焊接在底板上表面,所述旋转电机装嵌在安装座上表面,所述旋转电机上表面通过螺栓安装有转动轴,所述转动轴上表面焊接有旋转杆,所述旋转杆上表面焊接有安装块,所述安装块一表面焊接有两个安装板,两个所述安装板相对设置,两个所述安装板之间装嵌有连轴,所述连轴与两个安装板之间转动配合。
6.进一步地,所述连轴一端贯穿安装板一表面,所述连轴一端通过螺栓安装有转动电机,所述连轴周侧面装嵌有连接块。
7.进一步地,所述连接块一表面通过螺栓安装有第一电动推杆,所述第一电动推杆一端焊接有承接块。
8.进一步地,所述承接块下表面通过螺栓安装有第二电动推杆,所述第二电动推杆一端焊接有安装框。
9.进一步地,所述安装框内部两相对表面均焊接有第三电动推杆,两个所述第三电动推杆一端均焊接有夹板。
10.本实用新型的实施方式具有如下优点:
11.1、本实用新型通过旋转电机、转动电机和第一电动推杆结构,提高机器人使用时的灵活性,在操作人员使用时能做出更多灵活的动作,方便后期的使用,提高机器人的适用范围。
12.2、本实用新型通过第二电动推杆和第三电动推杆结构,进一步提高装置的使用灵活性,提高机器人的可操作空间。
附图说明
13.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据提供的附图引伸获得其它的实施附图。
14.图1为本实用新型实施方式中一种灵活性高的工业施工用机器人的结构示意图;
15.图2为本实用新型实施方式中一种灵活性高的工业施工用机器人的后视结构示意图;
16.图3为本实用新型实施方式中一种灵活性高的工业施工用机器人的前视结构示意图;
17.图4为本实用新型实施方式中一种灵活性高的工业施工用机器人的右视结构示意图;
18.图5为本实用新型实施方式中一种灵活性高的工业施工用机器人的俯视结构示意图。
19.图中:1、底板;2、安装孔;3、安装座;4、旋转电机;5、转动轴;6、旋转杆;7、安装块;8、安装板;9、连轴;10、转动电机;11、连接块;12、第一电动推杆;13、承接块;14、第二电动推杆;15、安装框;16、第三电动推杆;17、夹板。
具体实施方式
20.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1-图5所示,本实用新型提供了一种灵活性高的工业施工用机器人,包括底板1、安装座3和旋转电机4,底板1上表面周侧均设置有安装孔2,安装座3焊接在底板1上表面,旋转电机4装嵌在安装座3上表面,旋转电机4上表面通过螺栓安装有转动轴5;
22.设置旋转电机4、转动电机10和第一电动推杆12的作用在于:现有技术中,工业施工用机器人在使用时其灵活性有所欠缺,不方便做出灵活的动作,导致后期在使用时存在一定的局限性,降低了机器人的适用范围,特设置旋转电机4、转动电机10和第一电动推杆12提高机器人使用时的灵活性,在操作人员使用时能做出更多灵活的动作,方便后期的使用,提高机器人的适用范围,为了更好地说明上述效果,对此具体论述如下:
23.转动轴5上表面焊接有旋转杆6,旋转杆6上表面焊接有安装块7,安装块7一表面焊接有两个安装板8,两个安装板8相对设置,两个安装板8之间装嵌有连轴9,连轴9与两个安装板8之间转动配合。
24.连轴9一端贯穿安装板8一表面,连轴9一端通过螺栓安装有转动电机10,连轴9周侧面装嵌有连接块11,连接块11一表面通过螺栓安装有第一电动推杆12,第一电动推杆12一端焊接有承接块13。
25.承接块13下表面通过螺栓安装有第二电动推杆14,第二电动推杆14一端焊接有安装框15,安装框15内部两相对表面均焊接有第三电动推杆16,进一步提高装置的使用灵活性,提高机器人的可操作空间,两个第三电动推杆16一端均焊接有夹板17。
26.如图1-图5所示,本实用新型提供了一种灵活性高的工业施工用机器人,优选地,旋转电机4、转动电机10的型号为ye2-100,第一电动推杆12、第二电动推杆14和第三电动推
杆16的型号为ip40x,其使用方法为:首先通过旋转电机4带动旋转杆6和安装块(7)转动,方便夹板17移动至合适位置,而后通过第一电动推杆12和第二电动推杆14将安装框15移动至合适位置,而后根据夹取物件的大小通过第三电动推杆16调整两个夹板17的位置,在夹取物件后可通过转动电机10调整其角度,提高机器人使用时的灵活性,在操作人员使用时能做出更多灵活的动作,方便后期的使用,提高机器人的适用范围,提高机器人的可操作空间。
27.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
技术特征:
1.一种灵活性高的工业施工用机器人,包括底板(1)、安装座(3)和旋转电机(4),其特征在于,所述底板(1)上表面周侧均设置有安装孔(2),所述安装座(3)焊接在底板(1)上表面,所述旋转电机(4)装嵌在安装座(3)上表面,所述旋转电机(4)上表面通过螺栓安装有转动轴(5),所述转动轴(5)上表面焊接有旋转杆(6),所述旋转杆(6)上表面焊接有安装块(7),所述安装块(7)一表面焊接有两个安装板(8),两个所述安装板(8)相对设置,两个所述安装板(8)之间装嵌有连轴(9),所述连轴(9)与两个安装板(8)之间转动配合。2.根据权利要求1所述的一种灵活性高的工业施工用机器人,其特征在于,所述连轴(9)一端贯穿安装板(8)一表面,所述连轴(9)一端通过螺栓安装有转动电机(10),所述连轴(9)周侧面装嵌有连接块(11)。3.根据权利要求2所述的一种灵活性高的工业施工用机器人,其特征在于,所述连接块(11)一表面通过螺栓安装有第一电动推杆(12),所述第一电动推杆(12)一端焊接有承接块(13)。4.根据权利要求3所述的一种灵活性高的工业施工用机器人,其特征在于,所述承接块(13)下表面通过螺栓安装有第二电动推杆(14),所述第二电动推杆(14)一端焊接有安装框(15)。5.根据权利要求4所述的一种灵活性高的工业施工用机器人,其特征在于,所述安装框(15)内部两相对表面均焊接有第三电动推杆(16),两个所述第三电动推杆(16)一端均焊接有夹板(17)。
技术总结
本实用新型实施例公开了一种灵活性高的工业施工用机器人,涉及机器人技术领域。本实用新型包括底板、安装座和旋转电机,底板上表面周侧均设置有安装孔,安装座焊接在底板上表面,旋转电机装嵌在安装座上表面,旋转电机上表面通过螺栓安装有转动轴,转动轴上表面焊接有旋转杆,旋转杆上表面焊接有安装块,安装块一表面焊接有两个安装板,两个安装板相对设置,两个安装板之间装嵌有连轴,连轴与两个安装板之间转动配合。本实用新型通过旋转电机、转动电机和第一电动推杆结构,提高机器人使用时的灵活性,在操作人员使用时能做出更多灵活的动作,方便后期的使用,提高机器人的适用范围。围。围。
技术研发人员:高永峰 刘兰芳
受保护的技术使用者:高永峰
技术研发日:2022.10.21
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。