1.本发明涉及相控阵天线技术领域,特别是一种相控阵天线自跟踪系统及数字自跟踪环路的在线切换方法。
背景技术:
2.数字波束形成的相控阵天线技术是当前天线研究的热点前沿领域,它采用先进的数字波束形成技术对阵列信号进行处理,可以获得优良的波束性能,方便地得到超分辨和低副瓣的性能,实现波束扫描、自校准、自适应波束形成与对全空域动态目标的波束自跟踪等。
3.与传统抛物面天线不同,在采用数字信号处理技术的相控阵天线的应用中,为提高系统的可靠性,数字波束形成单元(dbf)需要按照热备份的方式工作,即数字波束形成单元(dbf)分为a、b两套,并采用a套在线工作,b套加电但处于备份机状态的工作方式。当在线工作的a套单元出现故障时,备份的b套可在系统不停机的情况下无缝在线热切换到在线工作状态,以满足系统连续工作的需要。在有自跟踪功能需要的数字波束形成的相控阵天线中,对应于数字波束形成单元(dbf)的主、备的工作方式,相控阵天线的自跟踪系统同样需要按主、备的方式分为a、b两套,并按照热备份的方式工作。因此,为保证相控阵天线不丢失空间目标,天线在进行自跟踪系统的主、备在线热切换时,不能中断相控阵天线对目标的自跟踪状态,且需要满足相控阵天线对空间目标自跟踪的连续性,避免在主、备切换时因出现信号抖动而导致系统的各种异常情况。
技术实现要素:
4.针对数字波束形成的相控阵天线设备的主、备切换时无法保持天线对空间目标自跟踪的连续性的问题,本发明提供一种相控阵天线自跟踪系统及数字自跟踪环路的在线切换方法,通过对数字自跟踪环路中瞬时自跟踪速度量,瞬时角抖动量等状态的提取,简单可靠、耗费硬件资源小。
5.本发明公开了一种相控阵天线自跟踪系统,其包括依次连接的数字波束形成单元,自跟踪接收机,自跟踪环路单元和主、备跟踪环路切换控制单元;所述数字波束形成单元用于将相控阵天线阵面接收的波束指向信号转换为合、差波束信号;所述自跟踪接收机用于将合、差波束信号转换为方位自跟踪误差电压和俯仰自跟踪误差电压;所述自跟踪环路单元用于对方位自跟踪误差电压和俯仰自跟踪误差电压处理,分别形成主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量;其中,所述自跟踪环路单元包括主用a套自跟踪环路单元和备用b套自跟踪环路单元;所述主、备跟踪环路切换控制单元用于根据所述主用a套自跟踪环路单元的波束
指向、状态变量和所述备用b套自跟踪环路单元的波束指向、状态变量,完成所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元两者之间的在线热切换;其中,波束指向包括波束的方位角指向和俯仰角指向;状态变量包括方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量、俯仰角瞬时角度状态变量。
6.进一步地,所述相控阵天线自跟踪系统还包括分别与所述数字波束形成单元和所述主、备跟踪环路切换控制单元连接的波控计算机;所述波控计算机用于将主、备跟踪环路切换控制单元输出的波束指向送入数字波束形成单元,以形成数字波束。
7.进一步地,所述数字波束形成单元包括主用a套数字波束形成单元和备用b套数字波束形成单元;所述自跟踪接收机包括主用a套跟踪接收机和备用b套跟踪接收机;其中,所述主用a套数字波束形成单元依次与所述主用a套跟踪接收机和所述主用a套自跟踪环路单元相连接;所述备用b套数字波束形成单元依次与备用b套跟踪接收机和备用b套自跟踪环路单元相连接;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元分别通过所述主、备跟踪环路切换控制单元与所述波控计算机相连接;所述波控计算机与所述备用b套数字波束形成单元连接。
8.进一步地,所述主用a套跟踪接收机输出的自跟踪误差电压和所述备用b套跟踪接收机输出的自跟踪误差电压均包括俯仰自跟踪误差电压和方位自跟踪误差电压;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元均包括相同的方位自跟踪环路和俯仰自跟踪环路;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元均输出方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量与俯仰角瞬时角度状态变量;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元输出的波束指向均包括波束指向的方位角指向和波束指向的俯仰角指向。
9.本发明还公开了一种基于相控阵天线自跟踪系统的数字自跟踪环路的在线切换方法,所述数字自跟踪环路的在线切换方法包括:数字波束形成单元将相控阵天线阵面接收的波束指向信号转换为合、差波束信号;自跟踪接收机将合、差波束信号转换为方位自跟踪误差电压和俯仰自跟踪误差电压;自跟踪环路单元对方位自跟踪误差电压和俯仰自跟踪误差电压处理,分别形成主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量;其中,自跟踪环路单元包括主用a套自跟踪环路单元和备用b套自跟踪环路单元;主、备跟踪环路切换控制单元根据主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量,完成主用a套自跟踪环路单元和备用b套自跟踪环路单元两者之间的在线热切换;其中,波束指向包括波束的方位角指向和俯仰角指向;状态变量包括方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量、俯仰角瞬时角度状态变量。
10.进一步地,主用a套自跟踪环路单元接收主用a套跟踪接收机输出的方位自跟踪误
差电压和俯仰自跟踪误差电压;备用b套自跟踪环路单元接收备用b套跟踪接收机输出的方位自跟踪误差电压;在主用a套自跟踪环路单元或备用b套自跟踪环路单元中,获取其对应的当前时刻的方位自跟踪环路的状态变量和波束指向的过程为:当前时刻的方位角速度状态变量=前一时刻的方位角速度状态变量 *当前时刻的方位自跟踪误差电压;当前时刻的方位角瞬时角度状态变量=*当前时刻的方位自跟踪误差电压 当前时刻的方位角速度状态变量;当前时刻的波束的方位角指向=前一时刻的波束的方位角指向 *当前时刻的方位角瞬时角度状态变量;在主用a套自跟踪环路单元或备用b套自跟踪环路单元中,获取其对应的当前时刻的俯仰自跟踪环路的状态变量和波束指向的过程为:当前时刻的俯仰角速度状态变量=前一时刻的俯仰角速度状态变量 *当前时刻的俯仰自跟踪误差电压;当前时刻的俯仰角瞬时角度状态变量=*当前时刻的俯仰自跟踪误差电压 当前时刻的俯仰角速度状态变量;当前时刻的波束的俯仰角指向=前一时刻的波束的俯仰角指向 *当前时刻的俯仰角瞬时角度状态变量;其中,和均为主用a套自跟踪环路单元或备用b套自跟踪环路单元中方位自跟踪环路或俯仰自跟踪环路的环路系数,为主用a套自跟踪环路单元或备用b套自跟踪环路单元中方位自跟踪环路或俯仰自跟踪环路的增益系数,*为乘号。
11.进一步地,主、备跟踪环路切换控制单元按照接收的主用a套自跟踪环路单元当前时刻的方位角速度状态变量,记为,当前时刻的方位角瞬时角度状态变量,记为、当前时刻的俯仰角速度状态变量,记为、当前时刻的俯仰角瞬时角度状态变量,记为,设置主用a套自跟踪环路单元的参数变量,以对主用a套自跟踪环路单元进行初始化;其中,主用a套自跟踪环路单元的参数变量包括:方位角速度参数变量,记为、方位角瞬时角度参数变量,记为、俯仰角速度参数变量,记为、俯仰角瞬时角度参数变量,记为。
12.进一步地,所述主、备跟踪环路切换控制单元根据接收的备用b套自跟踪环路单元传输的当前时刻的方位自跟踪环路的方位角速度状态变量,记为、当前时刻的方位角瞬时角度状态变量,记为、当前时刻的俯仰角速度状态变量,记为、当前时刻的俯仰角瞬时角度状态变量,记为,设置备用b套自跟踪环路单元的参数变量,以对备用b套自跟踪环路单元进行初始化;其中,备用b套自跟踪环路单元的参数变量包括:方位角速度参数变量,记为、方位角瞬时角度参数变量,记为、俯仰角速度参数变量,记为、俯仰角瞬时角度设置参数变量,记为。
13.进一步地,当主、备跟踪环路切换控制单元实现从主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换过程为:按照主用a套自跟踪环路单元的、、、,设置备用b套自跟踪环路单元的参数变量,即、;在设置备用b套自跟踪环路单元的参数变量之后,即完成自跟踪环路单元的复位,此时将备用b套自跟踪环路单元切换为主用a套自跟踪环路单元,完成闭环;同时将主用a套自跟踪环路单元切换为备用b套自跟踪环路单元,完成开环;将切换后的备用b套自跟踪环路单元输出的波束指向作为主、备跟踪环路切换控制单元的波束指向,完成主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换。
14.进一步地,所述主、备跟踪环路切换控制单元实现从备用b套自跟踪环路到主用a套自跟踪环路的切换过程与实现从主用a套自跟踪环路到备用b套自跟踪环路的切换过程类似。
15.由于采用了上述技术方案,本发明具有如下的优点:(1)提高了相控阵天线的性能。本发明通过主、备跟踪环路切换单元,完成主、备自跟踪环路的在线热切换,满足相控阵天线对空间目标自跟踪的连续性,避免在主、备切换时因出现信号抖动而导致系统的各种异常情况。解决了相控阵天线系统应用中的一个关键问题。
16.(2)实现简单、资源占用较少,降低系统设计成本。利用本发明不需要复杂电路,实现方法比较简单。本发明仅需要使用主、备跟踪环路切换单元,并且通过主、备切换算法实现主、备自跟踪环路热切换功能,便于自动化运行,降低了系统设计成本。
17.(3)本发明操作简便快捷,操作流程简单,便于系统设计。
附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
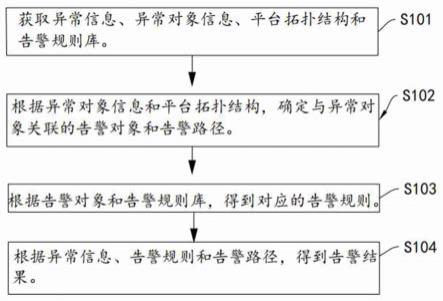
19.图1是本发明实施例的一种数字波束形成的相控阵天线的自跟踪系统的组成框图;图2是本发明实施例的一种数字波束形成的相控阵天线的自跟踪系统的方位自跟踪环路原理框图;图3是本发明实施例的一种数字波束形成的相控阵天线的自跟踪系统的俯仰自跟踪环路原理框图;图4是本发明实施例的一种数字波束形成的相控阵天线的主、备跟踪环路切换单元的信号流图;图5是本发明实施例的一种数字波束形成的相控阵天线的自跟踪系统的主、备切换流程图。
具体实施方式
20.结合附图和实施例对本发明作进一步说明,显然,所描述的实施例仅是本发明实施例一部分实施例,而不是全部的实施例。本领域普通技术人员所获得的所有其他实施例,都应当属于本发明实施例保护的范围。
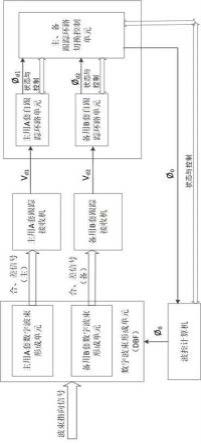
21.参阅图1,相控阵天线自跟踪系统由数字波束形成单元(dbf)、自跟踪接收机、自跟踪环路、主、备自跟踪环路切换控制和波控计算机五部分组成。首先,相控阵天线阵面接收的信号通过数字波束形成单元(dbf)形成合、差波束信号,然后将和差波束信号送自跟踪接收机。自跟踪接收机对合、差波束信号进行处理,并将处理后得到的方位自跟踪误差电压和俯仰自跟踪误差电压送自跟踪环路单元。自跟踪环路单元通过对方位自跟踪误差电压和俯仰自跟踪误差电压处理,形成波束指向。最后由波控计算机将波束指向ф0送波束形成单元(dbf)并完成波束形成。这里数字波束形成单元(dbf)、自跟踪接收机和自跟踪环路单元都有主、备两套,其主、备的切换受主、备跟踪环路切换控制单元控制。图中,主用a套跟踪接收机输出的自跟踪误差电压v
d1
和备用b套跟踪接收机输出的自跟踪误差电压v
d2
,分别包含方位自跟踪误差电压和俯仰自跟踪误差电压两部分;主用a套自跟踪环路单元输出的波束指向
ø
d1
和备用b套自跟踪环路单元输出的波束指向
ø
d2
,分别包含波束的方位角指向和俯仰角指向两部分。
22.参阅图2与图3,在主用a套自跟踪环路单元或备用b套自跟踪环路单元中,自跟踪环路单元包含方位自跟踪环路和俯仰自跟踪环路两部分。其中,在主用a套自跟踪环路单元中:方位自跟踪环路接收自跟踪接收机送来的方位自跟踪误差电压,经过计算产生自跟踪波束指向的方位角指向,其算法如下:
其中:g1和g2为方位自跟踪环路的环路系数,为环路的增益系数,n为离散时间,为当前时刻的方位自跟踪环路的自跟踪角速度状态变量,为当前时刻的方位自跟踪环路的瞬时角度状态变量;俯仰自跟踪环路接收自跟踪接收机送来的俯仰自跟踪误差电压,经过计算产生自跟踪波束指向的俯仰角指向,其算法如下:其中:g1和g2为俯仰自跟踪环路的环路系数,为环路的增益系数,n为离散时间,为当前时刻的俯仰自跟踪环路的自跟踪角速度状态变量,为当前时刻的俯仰自跟踪环路的瞬时角度状态变量;按照本实施例中上述6个计算公式类推,可以计算得出备用b套自跟踪环路单元中当前时刻的方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量与俯仰角瞬时角度状态变量、波束指向的方位角指向、波束指向的俯仰角指向。
23.参阅图4与图5,主、备跟踪环路切换单元接收主用a套自跟踪环路单元送来的当前时刻的方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量与俯仰角瞬时角度状态变量,并可以通过主、备跟踪环路切换单元送给主用a套自跟踪环路单元的当前时刻的方位角速度设置变量、方位角瞬时角度设置变量、俯仰角速度设置变量与俯仰角瞬时角度设置变量对主用a套自跟踪环路单元进行初始化。同样主、备跟踪环路切换单元接收备用b套自跟踪
环路单元送来的当前时刻的方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量与俯仰角瞬时角度状态变量,并可以通过主、备跟踪环路切换单元送给备用b套自跟踪环路单元当前时刻的方位角速度设置变量、方位角瞬时角度设置变量、俯仰角速度设置变量与俯仰角瞬时角度设置变量对备用b套自跟踪环路单元进行初始化。
24.在主用a套自跟踪环路单元切换到备用b套自跟踪环路单元开始后,首先将a套方位自跟踪环路当前时刻的方位角速度变量与方位角瞬时角度变量送到b套方位自跟踪环路当前时刻的方位角速度变量与方位角瞬时角度变量,再时将b套方位自跟踪环路参数复位后闭环,同时将a套方位自跟踪环路开环。同时将a套俯仰自跟踪环路当前时刻的俯仰角速度变量与俯仰角瞬时角度变量送到b套俯仰自跟踪环路当前时刻的俯仰角速度变量与俯仰角瞬时角度变量,再时将b套俯仰自跟踪环路参数复位后闭环,同时将a套俯仰自跟踪环路开环。最后将主、备切换控制模块中的备用b套自跟踪环路单元的输出
ø
d2
送到
ø0,完成主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换。
25.备用b套自跟踪环路单元到主用a套自跟踪环路单元的切换过程与上述主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换过程类似。
26.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。