技术特征:
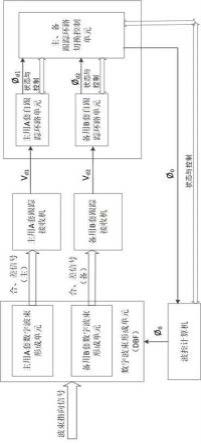
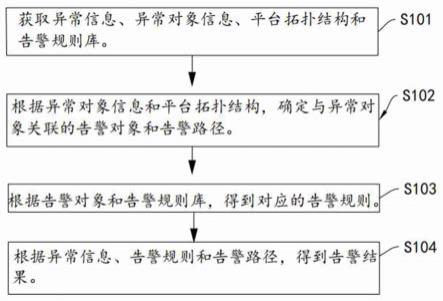
1.一种相控阵天线自跟踪系统,其特征在于,包括依次连接的数字波束形成单元,自跟踪接收机,自跟踪环路单元和主、备跟踪环路切换控制单元;所述数字波束形成单元用于将相控阵天线阵面接收的波束指向信号转换为合、差波束信号;所述自跟踪接收机用于将合、差波束信号转换为方位自跟踪误差电压和俯仰自跟踪误差电压;所述自跟踪环路单元用于对方位自跟踪误差电压和俯仰自跟踪误差电压处理,分别形成主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量;其中,所述自跟踪环路单元包括主用a套自跟踪环路单元和备用b套自跟踪环路单元;所述主、备跟踪环路切换控制单元用于根据所述主用a套自跟踪环路单元的波束指向、状态变量和所述备用b套自跟踪环路单元的波束指向、状态变量,完成所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元两者之间的在线热切换;其中,波束指向包括波束的方位角指向和俯仰角指向;状态变量包括方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量、俯仰角瞬时角度状态变量。2.根据权利要求1所述的相控阵天线自跟踪系统,其特征在于,所述相控阵天线自跟踪系统还包括分别与所述数字波束形成单元和所述主、备跟踪环路切换控制单元连接的波控计算机;所述波控计算机用于将主、备跟踪环路切换控制单元输出的波束指向送入数字波束形成单元,以形成数字波束。3.根据权利要求2所述的相控阵天线自跟踪系统,其特征在于,所述数字波束形成单元包括主用a套数字波束形成单元和备用b套数字波束形成单元;所述自跟踪接收机包括主用a套跟踪接收机和备用b套跟踪接收机;其中,所述主用a套数字波束形成单元依次与所述主用a套跟踪接收机和所述主用a套自跟踪环路单元相连接;所述备用b套数字波束形成单元依次与备用b套跟踪接收机和备用b套自跟踪环路单元相连接;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元分别通过所述主、备跟踪环路切换控制单元与所述波控计算机相连接;所述波控计算机与所述备用b套数字波束形成单元连接。4.根据权利要求3所述的相控阵天线自跟踪系统,其特征在于,所述主用a套跟踪接收机输出的自跟踪误差电压和所述备用b套跟踪接收机输出的自跟踪误差电压均包括俯仰自跟踪误差电压和方位自跟踪误差电压;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元均包括相同的方位自跟踪环路和俯仰自跟踪环路;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元均输出方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量与俯仰角瞬时角度状态变量;所述主用a套自跟踪环路单元和所述备用b套自跟踪环路单元输出的波束指向均包括波束指向的方位角指向和波束指向的俯仰角指向。5.一种基于权利要求1-4任一项所述的相控阵天线自跟踪系统的数字自跟踪环路的在线切换方法,其特征在于,所述数字自跟踪环路的在线切换方法包括:
数字波束形成单元将相控阵天线阵面接收的波束指向信号转换为合、差波束信号;自跟踪接收机将合、差波束信号转换为方位自跟踪误差电压和俯仰自跟踪误差电压;自跟踪环路单元对方位自跟踪误差电压和俯仰自跟踪误差电压处理,分别形成主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量;其中,自跟踪环路单元包括主用a套自跟踪环路单元和备用b套自跟踪环路单元;主、备跟踪环路切换控制单元根据主用a套自跟踪环路单元的波束指向、状态变量和备用b套自跟踪环路单元的波束指向、状态变量,完成主用a套自跟踪环路单元和备用b套自跟踪环路单元两者之间的在线热切换;其中,波束指向包括波束的方位角指向和俯仰角指向;状态变量包括方位角速度状态变量、方位角瞬时角度状态变量、俯仰角速度状态变量、俯仰角瞬时角度状态变量。6.根据权利要求5所述的数字自跟踪环路的在线切换方法,其特征在于,主用a套自跟踪环路单元接收主用a套跟踪接收机输出的方位自跟踪误差电压和俯仰自跟踪误差电压;备用b套自跟踪环路单元接收备用b套跟踪接收机输出的方位自跟踪误差电压;在主用a套自跟踪环路单元或备用b套自跟踪环路单元中,获取其对应的当前时刻的方位自跟踪环路的状态变量和波束指向的过程为:当前时刻的方位角速度状态变量=前一时刻的方位角速度状态变量 *当前时刻的方位自跟踪误差电压;当前时刻的方位角瞬时角度状态变量=*当前时刻的方位自跟踪误差电压 当前时刻的方位角速度状态变量;当前时刻的波束的方位角指向=前一时刻的波束的方位角指向 *当前时刻的方位角瞬时角度状态变量;在主用a套自跟踪环路单元或备用b套自跟踪环路单元中,获取其对应的当前时刻的俯仰自跟踪环路的状态变量和波束指向的过程为:当前时刻的俯仰角速度状态变量=前一时刻的俯仰角速度状态变量 *当前时刻的俯仰自跟踪误差电压;当前时刻的俯仰角瞬时角度状态变量=*当前时刻的俯仰自跟踪误差电压 当前时刻的俯仰角速度状态变量;当前时刻的波束的俯仰角指向=前一时刻的波束的俯仰角指向 *当前时刻的俯仰角瞬时角度状态变量;其中,和均为主用a套自跟踪环路单元或备用b套自跟踪环路单元中方位自跟踪环路或俯仰自跟踪环路的环路系数,为主用a套自跟踪环路单元或备用b套自跟踪环路单元中方位自跟踪环路或俯仰自跟踪环路的增益系数,*为乘号。7.根据权利要求6所述的数字自跟踪环路的在线切换方法,其特征在于,主、备跟踪环
路切换控制单元按照接收的主用a套自跟踪环路单元当前时刻的方位角速度状态变量,记为,当前时刻的方位角瞬时角度状态变量,记为、当前时刻的俯仰角速度状态变量,记为、当前时刻的俯仰角瞬时角度状态变量,记为,设置主用a套自跟踪环路单元的参数变量,以对主用a套自跟踪环路单元进行初始化;其中,主用a套自跟踪环路单元的参数变量包括:方位角速度参数变量,记为、方位角瞬时角度参数变量,记为、俯仰角速度参数变量,记为、俯仰角瞬时角度参数变量,记为。8.根据权利要求7所述的数字自跟踪环路的在线切换方法,其特征在于,所述主、备跟踪环路切换控制单元根据接收的备用b套自跟踪环路单元传输的当前时刻的方位自跟踪环路的方位角速度状态变量,记为、当前时刻的方位角瞬时角度状态变量,记为、当前时刻的俯仰角速度状态变量,记为、当前时刻的俯仰角瞬时角度状态变量,记为,设置备用b套自跟踪环路单元的参数变量,以对备用b套自跟踪环路单元进行初始化;其中,备用b套自跟踪环路单元的参数变量包括:方位角速度参数变量,记为、方位角瞬时角度参数变量,记为、俯仰角速度参数变量,记为、俯仰角瞬时角度设置参数变量,记为。9.根据权利要求8所述的数字自跟踪环路的在线切换方法,其特征在于,当主、备跟踪环路切换控制单元实现从主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换过程为:按照主用a套自跟踪环路单元的、、、,设置备用b套自跟踪环路单元的参数变量,即、;在设置备用b套自跟踪环路单元的参数变量之后,即完成自跟踪环路单元的复位,此时将备用b套自跟踪环路单元切换为主用a套自跟踪环路单元,完成闭环;同时将主用a套自跟踪环路单元切换为备用b套自跟踪环路单元,完成开环;将切换后的备用b套自跟踪环路单元输出的波束指向作为主、备跟踪环路切换控制单
元的波束指向,完成主用a套自跟踪环路单元到备用b套自跟踪环路单元的切换。10.根据权利要求9所述的数字自跟踪环路的在线切换方法,其特征在于,所述主、备跟踪环路切换控制单元实现从备用b套自跟踪环路到主用a套自跟踪环路的切换过程与实现从主用a套自跟踪环路到备用b套自跟踪环路的切换过程类似。
技术总结
本发明公开了一种相控阵天线自跟踪系统及数字自跟踪环路的在线切换方法,其方法包括数字波束形成单元将相控阵天线阵面接收的信号转换为合、差波束信号;自跟踪接收机将合、差波束信号转换为方位自跟踪误差电压和俯仰自跟踪误差电压;自跟踪环路单元对方位自跟踪误差电压和俯仰自跟踪误差电压处理,分别形成主用A套自跟踪环路单元的波束指向、状态变量和备用B套自跟踪环路单元的波束指向、状态变量;主、备跟踪环路切换控制单元完成主用A套自跟踪环路单元和备用B套自跟踪环路单元两者之间的在线热切换。本发明能够在主用A套自跟踪环路单元和备用B套自跟踪环路单元之间切换时,保持天线对空间目标自跟踪的连续性,简单可靠、耗费硬件资源小。耗费硬件资源小。耗费硬件资源小。
技术研发人员:王文政 杜丹 扈景召 官劲 胡阳
受保护的技术使用者:中国电子科技集团公司第十研究所
技术研发日:2022.11.29
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。