1.本发明涉及餐厨垃圾处理技术领域,特别是涉及一种餐厨垃圾全资源化自动布料装置及其布料方法。
背景技术:
2.餐厨垃圾是人类生活饮食过程中产生的剩余物,主要由剩菜剩饭以及菜帮菜叶组成,含水率高达90%以上。现有的方法均需通过热处理将水分降低至60%以下才能进一步处理,其能源消耗高,对环境不友好。
3.目前已有的餐厨垃圾处理处置方法包括填埋、随生活垃圾焚烧、发酵等方法。填埋占用土地资源;因生活垃圾中含水率较高,焚烧过程不稳定安全隐患高;厌氧发酵过程产生的沼液、沼渣难于处理,好氧发酵资源化率低。
4.因此,市场上急需一种餐厨垃圾全资源化自动布料装置及其布料方法,用于解决上述问题。
技术实现要素:
5.本发明的目的是提供一种餐厨垃圾全资源化自动布料装置及其布料方法,用于解决上述现有技术中存在的技术问题,将餐厨垃圾作为蚯蚓的养料,处理过程简单,并且节约占地面积,在能够有效的处理餐厨垃圾的基础上,还能够提高蚯蚓的养殖效率。
6.为实现上述目的,本发明提供了如下方案:
7.本发明公开了一种餐厨垃圾全资源化自动布料装置,包括餐厨垃圾存储装置和蚯蚓养殖床,所述餐厨垃圾存储装置位于所述蚯蚓养殖床的上方;
8.所述餐厨垃圾存储装置的下端设有餐厨垃圾出口,所述餐厨垃圾出口处设有电动开关门,所述餐厨垃圾存储装置的下端设有若干个接收器;
9.所述蚯蚓养殖床的下端设有行走驱动装置,所述行走驱动装置用于带动所述蚯蚓养殖床移动,所述蚯蚓养殖床的上端设有若干个发射器,所述蚯蚓养殖床上设有滤网,所述滤网上用于养殖蚯蚓,所述滤网的下方设有废水储存槽。
10.优选的,所述行走驱动装置为皮带输送机,所述蚯蚓养殖床放置在所述皮带输送机上。
11.优选的,所述废水储存槽的侧壁上设有排水口。
12.优选的,所述蚯蚓养殖床的上表面设有养殖凹槽,所述养殖凹槽的方向与所述行走驱动装置的移动方向相同,所述餐厨垃圾存储装置的下端设有垃圾排出凸起,所述餐厨垃圾出口设置于所述垃圾排出凸起的下表面。
13.优选的,所述发射器为雷达发射器,所述接收器为雷达接收器。
14.本发明还公开了一种餐厨垃圾全资源化自动布料装置的布料方法,包括以下步骤:
15.s1、将生活中的餐厨垃圾倒入到餐厨垃圾存储装置;
16.s2、当行走驱动装置带动蚯蚓养殖床移动到餐厨垃圾存储装置的下方时,接收器接收到发射器发出的信号,控制电动开关门打开,餐厨垃圾掉落到蚯蚓养殖床上;
17.s3、当行走驱动装置带动蚯蚓养殖床离开到餐厨垃圾存储装置的下方时,接收器接收到发射器发出的信号,控制电动开关门关闭;
18.s4、位于滤网上的餐厨垃圾中的水会穿过滤网落入到废水储存槽中,当蚯蚓养殖床走完预计路程后,将废水储存槽中的废水排出;
19.s5、将蚯蚓养殖床输送至蚯蚓养殖室中。
20.优选的,步骤s1中的餐厨垃圾的含水率为80%-95%。
21.优选的,所述蚯蚓养殖床位于所述餐厨垃圾存储装置下方的时间为20-30s。
22.本发明相对于现有技术取得了以下技术效果:
23.本发明将餐厨垃圾存储装置中的餐厨垃圾倒入到蚯蚓养殖床上,作为蚯蚓的食物以及养料。能够有效的解决餐厨垃圾的处理问题,并且还能够提高蚯蚓的养殖效率,实现废物利用的技术效果。此外,整体结构较为简单,制造成本低,人工劳动强度较低。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
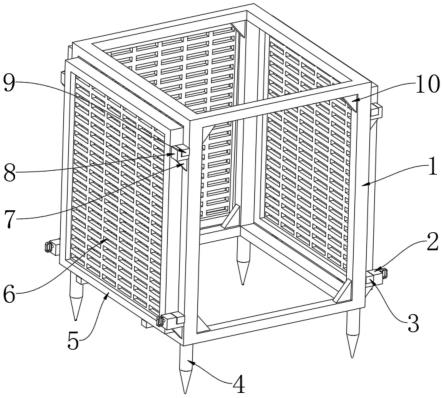
25.图1为本发明实施例餐厨垃圾全资源化自动布料装置的结构示意图;
26.图2为本发明实施例餐厨垃圾全资源化自动布料装置中蚯蚓养殖床的结构示意图;
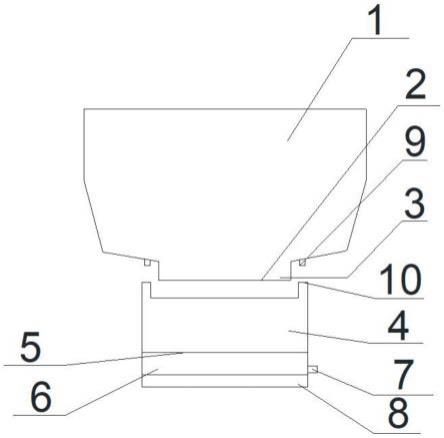
27.图3为本发明实施例餐厨垃圾全资源化自动布料装置中餐厨垃圾存储装置的局部示意图;
28.图中:1-餐厨垃圾存储装置;2-电动开关门;3-垃圾排出凸起;4-蚯蚓养殖床;5-滤网;6-废水储存槽;7-排水口;8-行走驱动装置;9-接收器;10-发射器。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.本发明的目的是提供一种餐厨垃圾全资源化自动布料装置及其布料方法,用于解决上述现有技术中存在的技术问题,将餐厨垃圾作为蚯蚓的养料,处理过程简单,并且节约占地面积,在能够有效的处理餐厨垃圾的基础上,还能够提高蚯蚓的养殖效率。
31.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
32.如图1-图3所示,本实施例提供了一种餐厨垃圾全资源化自动布料装置,包括餐厨垃圾存储装置1和蚯蚓养殖床4,餐厨垃圾存储装置1为一用于盛放餐厨垃圾的容器,餐厨垃
圾存储装置1位于蚯蚓养殖床4的上方;
33.餐厨垃圾存储装置1的下端设有餐厨垃圾出口,餐厨垃圾出口处设有电动开关门2,在此需要说明的是,电动开关门2为现有技术,与现有的电动平移门结构相同,即包括门扇、导轨、滑轮、驱动装置以及传动装置等,其中门扇上固定有滑轮,滑轮能够在导轨上滑动,驱动装置中的电机通过传动装置中的齿轮、齿条实现与门扇传动连接,利用驱动装置中的电机可以驱动门扇沿着导轨滑动,从而实现电动开关门2的开关作用,餐厨垃圾存储装置1的下端设有若干个接收器9;
34.蚯蚓养殖床4的下端设有行走驱动装置8,行走驱动装置8用于带动蚯蚓养殖床4移动,蚯蚓养殖床4的上端设有若干个发射器10,蚯蚓养殖床4上设有滤网5,滤网5上用于养殖蚯蚓,滤网5的下方设有废水储存槽6。
35.此外,还需要设置一个控制器,且行走驱动装置8、电动开关门2、发射器10和接收器9均与控制器电连接,控制器可以为plc控制器或其他类型的电控装置均可。
36.在实际使用时,先将日常的餐厨垃圾倒入到餐厨垃圾存储装置1之中,当餐厨垃圾存储装置1中的餐厨垃圾到达一定量时,利用控制器控制行走驱动装置8运行,使其带动蚯蚓养殖床4向餐厨垃圾存储装置1的方向移动。当蚯蚓养殖床4移动到餐厨垃圾存储装置1的下方时,发射器10发射的信号被接收器9接收,并将信号传输给控制器,通过控制器控制电动开关门2打开,餐厨垃圾存储装置1中的餐厨垃圾会通过餐厨垃圾出口掉落到蚯蚓养殖床4上。在滤网5的过滤作用下,会使得废水穿过滤网5,并掉落到废水储存槽6内进行暂时储存,而没有从滤网5上掉落下去的食物就作为蚯蚓的养料。当蚯蚓养殖床4要从餐厨垃圾存储装置1的下方离开时,接收器9接收到发射器10的信号,并将信号传输给控制器,然后通过控制器控制电动开关门2关闭即可,最后将蚯蚓养殖床4输送到指定位置即可。
37.于本实施例中,行走驱动装置8为皮带输送机,此外还可以使用其他类型的输送机,如滚筒输送机等,只要能够带动蚯蚓养殖床4移动均可。在实际使用时,只需将蚯蚓养殖床4放置在皮带输送机上即可,通过蚯蚓养殖床4与皮带输送机之间的摩擦力即可带动其移动。
38.于本实施例中,废水储存槽6的侧壁上设有排水口7,进一步的,还可以在排水口7处安装一个塞子或开关。在移动蚯蚓养殖床4的过程中关闭排水口7,来对废水进行短暂的储存;当需要将废水储存槽6中内的废水排出时,只需打开塞子或开关即可将废水排出。
39.于本实施例中,如图1所示,蚯蚓养殖床4的上表面设有养殖凹槽,养殖凹槽的长度方向与行走驱动装置8的移动方向相同,餐厨垃圾存储装置1的下端设有垃圾排出凸起3,餐厨垃圾出口设置于垃圾排出凸起3的下表面。垃圾排出凸起3的宽度要小于餐厨垃圾存储装置1上部分的宽度,且垃圾排出凸起3的宽度与养殖凹槽的宽度相匹配。当蚯蚓养殖床4经过餐厨垃圾存储装置1的下方时,垃圾排出凸起3会在养殖凹槽内并能够相对移动,在此需要注意垃圾排出凸起3和养殖凹槽之间具有一定间隙,并非直接接触。这样设置的目的是可以对蚯蚓养殖床4一个定位的作用,防止其移动方向发生偏移。
40.于本实施例中,发射器10为现有的雷达发射器,同理的,接收器9为现有的雷达接收器。当然,本领域技术人员还可以将其替换为其他类型发射器10和接收器9均可,只要能够用于感应位置并发出或接收信号均可。
41.进一步的,参考图1-图3,蚯蚓养殖床4和餐厨垃圾存储装置1的俯视图均为矩形结
构。发射器10为四个,分别固定于蚯蚓养殖床4的上端四角处;同理的,接收器9也为四个,且分别固定于餐厨垃圾存储装置1的下端四角处。在实际运行中,蚯蚓养殖床4会从餐厨垃圾存储装置1的后端移动到其前端。当蚯蚓养殖床4的前端两个发射器10到达餐厨垃圾存储装置1的后端两个接收器9的位置附近时,接收器9接收到发射器10的信号,并传输给控制器,控制器此时控制电动开关门2打开。随着蚯蚓养殖床4的移动,当位于蚯蚓养殖床4后端的两个发射器10到达餐厨垃圾存储装置1的前端两个接收器9的位置附近时,接收器9接收到发射器10的信号,并传输给控制器,控制器此时控制电动开关门2关闭即可。
42.实施例二、
43.本实施例还公开了一种餐厨垃圾全资源化自动布料装置的布料方法,包括实施例一中公开的技术特征,区别之处在于,还包括以下步骤:
44.s1、将生活中的餐厨垃圾倒入到餐厨垃圾存储装置1,餐厨垃圾存储装置1为一多边形容器,上端开口,便于餐厨垃圾的倒入;
45.s2、当行走驱动装置8带动蚯蚓养殖床4移动到餐厨垃圾存储装置1的下方时,接收器9接收到发射器10发出的信号,控制电动开关门2打开,餐厨垃圾掉落到蚯蚓养殖床4上;
46.s3、一小段时间后,当行走驱动装置8(即皮带输送机)带动蚯蚓养殖床4离开到餐厨垃圾存储装置1的下方时,接收器9接收到发射器10发出的信号,控制电动开关门2关闭;
47.s4、位于滤网5上的餐厨垃圾中的水会穿过滤网5落入到废水储存槽6中,当蚯蚓养殖床4走完预计路程后,将废水储存槽6中的废水通过排水口7排出;
48.s5、将蚯蚓养殖床4输送至蚯蚓养殖室中,进行集中养殖。
49.于本实施例中,步骤s1中的餐厨垃圾多为剩饭剩菜,如菜帮和菜叶等。餐厨垃圾的含水率为80%-95%,对于不同餐厨垃圾,其含水率也会有所不同,因此并不仅仅局限于本实施例中的数值范围。
50.于本实施例中,蚯蚓养殖床4位于餐厨垃圾存储装置1下方的时间为20-30s。也就是当蚯蚓养殖床4的前端两个发射器10到达餐厨垃圾存储装置1的后端两个接收器9的位置附近时到蚯蚓养殖床4的后端两个发射器10到达餐厨垃圾存储装置1的前端两个接收器9的位置附近时之间的时间段为20-30s。此过程中,蚯蚓养殖床4可以根据需要在餐厨垃圾存储装置1的下方停留一段时间,也可以一直保持缓慢的移动均可。
51.本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。