1.本实用新型属于焊接技术领域,特别是涉及一种自动焊接机器人定位工装。
背景技术:
2.现有技术中,实现将两块板材焊接在一起的设备通常包括两个工位,即组对工位及焊接工位。具体在焊接过程中,一般先在组对工位对定位后的两块板材进行焊接,而现有的自动焊接机器人在使用时存在不方便对焊接的两块板材进行定位组装。
技术实现要素:
3.本实用新型的目的在于提供一种自动焊接机器人定位工装,通过在伸缩支架的两端分别设置有一用于夹持加工件的夹持件,实现在焊接过程中对两个加工件进行定位组装,解决了现有提出的问题。
4.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
5.本实用新型为一种自动焊接机器人定位工装,包括一伸缩支架,所述伸缩支架的两端分别设置有一用于夹持加工件的夹持件;所述夹持件包括一矩形板,所述矩形板的两端分别设置有用于夹持加工件的夹持结构;所述夹持结构包括设置在矩形板端部两侧的两个凸出设置的安装耳,两所述安装耳的相对内侧壁分别设置有一对微型伸缩气缸,两所述微型伸缩气缸的端部设置有活动板,所述活动板的上表面设置有用于夹持加工件的夹棒。
6.进一步地,所述夹棒包括金属制的夹棒本体、以及设置在夹棒本体外侧的橡胶层。
7.进一步地,所述伸缩支架包括一基块,所述基块的两端分别连接有一伸缩气缸,所述伸缩气缸的端部连接有基板,所述矩形板安装在所述基板上;所述基板上开设有一矩形孔,所述矩形孔内设置导轨,所述导轨上配合设置电动滑块,所述矩形板安装在所述电动滑块上。
8.进一步地,所述伸缩气缸的伸缩方向与所述导轨的长度方向相同或相反;所述微型伸缩气缸的伸缩方向与所述导轨的长度方向相同或相反;所述伸缩气缸的伸缩方向垂直或平行于海平面;所述基块的一侧连接有一电动升降柱,所述电动升降柱的伸缩方向垂直所述伸缩气缸的伸缩方向;所述加工件的截面呈“c”型、u型、v型、l型、z型或弧形等其他形状。
9.本实用新型具有以下有益效果:
10.本实用新型通过在伸缩支架的两端分别设置有一用于夹持加工件的夹持件,实现在焊接过程中对两个加工件进行定位组装,同时该装置结构简单,操作方便。
11.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
12.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,
对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
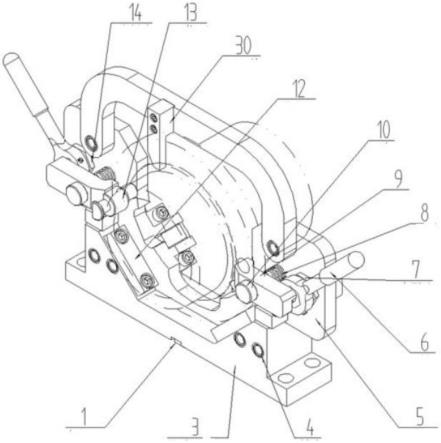
13.图1为本实用新型定位工装结构示意图;
14.图2为本实用新型伸缩支架和夹持件组合结构示意图;
15.图3为图2中a处局部放大图。
具体实施方式
16.如图1-3;一种自动焊接机器人定位工装,包括一伸缩支架1,伸缩支架1的两端分别设置有一用于夹持截面呈半圆形的加工件4的夹持件;夹持件包括一矩形板20,矩形板20的两端分别设置有用于夹持加工件4的夹持结构;夹持结构包括设置在矩形板20端部两侧的两个凸出设置的安装耳 2,两安装耳2的相对内侧壁13分别设置有一对微型伸缩气缸21,两微型伸缩气缸21的端部设置有活动板22,活动板22的上表面设置有用于夹持加工件4的夹棒23。
17.使用时,先将两个加工件4分别安装在两夹持件上;夹持时先控制微型伸缩气缸21收缩,将加工件4放入后,控制微型伸缩气缸21探出从而利用夹棒23对加工件4进行夹持;控制伸缩支架1收缩将两个加工件4的焊接侧对齐,然后再通过设置在该定位工装两侧的焊接机器人进行自动焊接即可。
18.夹棒23包括金属制的夹棒本体、以及设置在夹棒本体外侧的橡胶层;通过橡胶层的设置,避免夹持过程中夹棒本体对加工件4内外侧壁造成摩擦损坏。
19.伸缩支架1包括一基块11,基块11的两端分别连接有一伸缩气缸12,伸缩气缸12的端部连接有基板13,矩形板20安装在基板13上。
20.基板13上开设有一矩形孔14,矩形孔14内设置导轨15,导轨15上配合设置电动滑块,矩形板20安装在电动滑块上;通过电动滑块的设置,实现在焊接过程中微调加工件4的位置进行对齐。
21.伸缩气缸12的伸缩方向与导轨15的长度方向相同或相反;微型伸缩气缸21的伸缩方向与导轨15的长度方向相同或相反;伸缩气缸12的伸缩方向垂直于海平面;基块11的一侧连接有一电动升降柱3,电动升降柱3 的伸缩方向垂直伸缩气缸12的伸缩方向。
22.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
23.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
技术特征:
1.一种自动焊接机器人定位工装,其特征在于:包括一伸缩支架(1),所述伸缩支架(1)的两端分别设置有一用于夹持加工件(4)的夹持件;所述夹持件包括一矩形板(20),所述矩形板(20)的两端分别设置有用于夹持加工件(4)的夹持结构;所述夹持结构包括设置在矩形板(20)端部两侧的两个凸出设置的安装耳(2),两所述安装耳(2)的相对内侧壁分别设置有一对微型伸缩气缸(21),两所述微型伸缩气缸(21)的端部设置有活动板(22),所述活动板(22)的上表面设置有用于夹持加工件(4)的夹棒(23)。2.根据权利要求1所述的一种自动焊接机器人定位工装,其特征在于,所述夹棒(23)包括金属制的夹棒本体、以及设置在夹棒本体外侧的橡胶层。3.根据权利要求1所述的一种自动焊接机器人定位工装,其特征在于,所述伸缩支架(1)包括一基块(11),所述基块(11)的两端分别连接有一伸缩气缸(12),所述伸缩气缸(12)的端部连接有基板(13),所述矩形板(20)安装在所述基板(13)上。4.根据权利要求3所述的一种自动焊接机器人定位工装,其特征在于,所述基板(13)上开设有一矩形孔(14),所述矩形孔(14)内设置导轨(15),所述导轨(15)上配合设置电动滑块,所述矩形板(20)安装在所述电动滑块上。5.根据权利要求4所述的一种自动焊接机器人定位工装,其特征在于,所述伸缩气缸(12)的伸缩方向与所述导轨(15)的长度方向相同或相反。6.根据权利要求4所述的一种自动焊接机器人定位工装,其特征在于,所述微型伸缩气缸(21)的伸缩方向与所述导轨(15)的长度方向相同或相反。7.根据权利要求3所述的一种自动焊接机器人定位工装,其特征在于,所述伸缩气缸(12)的伸缩方向垂直或平行于海平面。8.根据权利要求3所述的一种自动焊接机器人定位工装,其特征在于,所述基块(11)的一侧连接有一电动升降柱(3),所述电动升降柱(3)的伸缩方向垂直所述伸缩气缸(12)的伸缩方向。9.根据权利要求1所述的一种自动焊接机器人定位工装,其特征在于,所述加工件(4)的截面呈“c”型或“u”型或“v”型。
技术总结
本实用新型公开了一种自动焊接机器人定位工装,涉及焊接技术领域,本实用新型包括一伸缩支架,伸缩支架的两端分别设置有一用于夹持加工件的夹持件;夹持件包括一矩形板,矩形板的两端分别设置有用于夹持加工件的夹持结构;夹持结构包括设置在矩形板端部两侧的两个凸出设置的安装耳,两安装耳的相对内侧壁分别设置有一对微型伸缩气缸,两微型伸缩气缸的端部设置有活动板,活动板的上表面设置有用于夹持加工件的夹棒。本实用新型通过在伸缩支架的两端分别设置有一用于夹持加工件的夹持件,实现在焊接过程中对两个加工件进行定位组装。现在焊接过程中对两个加工件进行定位组装。现在焊接过程中对两个加工件进行定位组装。
技术研发人员:谢之凤
受保护的技术使用者:合肥中控智科机器人有限公司
技术研发日:2022.06.20
技术公布日:2023/1/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。