1.本发明涉及机器测试技术领域,具体涉及一种船舶轴系状态监测与故障智能诊断系统。
背景技术:
2.船舶轴系是船舶动力装置中的重要组成部分,承担着将主机发出的功率传递给螺旋桨,再将螺旋桨产生的轴向推力传递给船体实现推船航行的目的,船舶轴系是从主机输出端法兰起至尾轴为止,连接主机和螺旋桨,对于直接传动的推进系统,包括传递功率的传动轴及其轴承等零部件,主要有:推力轴和推力轴承、中间轴和中间轴承、尾轴和尾轴承以及其他附件等;对于间接传动的推进系统,除有上述传动轴和轴承外,还有离合器、弹性联轴器和减速齿轮箱等部件。
3.然而目前的船舶轴系在使用过程中,绝大多数依赖人工周期维保的方式对船舶轴系进行维护,无法做到对运行过程中的船舶轴系进行实时监测及故障诊断,这导致船舶轴系问题无法及时发现,造成船舶轴系进一步的损伤后才被用户察觉,以至于船舶轴系损毁或高昂的维修费用,且也因此造成船舶轴系的使用寿命非自然消耗。
技术实现要素:
4.解决的技术问题针对现有技术所存在的上述缺点,本发明提供了一种船舶轴系状态监测与故障智能诊断系统,解决了上述背景技术中提出的技术问题。
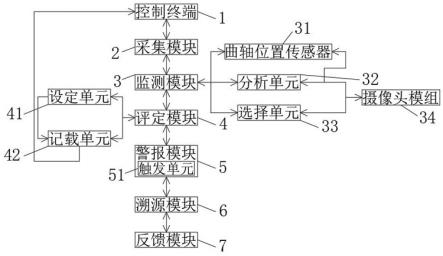
5.技术方案为实现以上目的,本发明通过以下技术方案予以实现:一种船舶轴系状态监测与故障智能诊断系统,包括:控制终端,是系统的主控端,用于发出控制命令;采集模块,用于采集船舶轴系的基础参数;监测模块,用于监测船舶轴系运行及非运行使用环境下的状态;评定模块,用于评定船舶轴系组成部件当前状态是否正常;报警模块,用于发出音频警报提示船舶轴系管理人员船舶轴系运行异常;溯源模块,用于获取评定模块运行评定结果为异常图像数据对应摄像头模组,参考该摄像头模组安装位置确定异常图像数据对应异常船舶轴系组成部件;反馈模块,用于接收溯源模块运行结果获取到的异常船舶轴系组成部件并向控制终端发送;其中,监测模块下级的曲轴位置传感器运行同步通过溯源模块对异常船舶轴系组成部件进行确定。
6.更进一步地,所述采集模块中采集的船舶轴系基础参数包括:船舶轴系组成部件生命周期、船舶轴系规格参数,船舶轴系配置船体自重及荷载负重、船舶轴系整体跨度、船
舶轴系运行功率。
7.更进一步地,所述监测模块下级设置有子模块,包括:曲轴位置传感器,用于监测船舶轴系的实时转速;分析单元,用于获取采集模块运行采集的船舶轴系基础参数,参考船舶轴系基础参数分析摄像头模组可安装位置;选择单元,用于获取分析单元运行分析到的摄像头模组的可安装位置,参考船舶轴系基础参数中船舶轴系整体跨度参数数据选择摄像头模组可安装位置进行安装;摄像头模组,用于捕捉船舶轴系组成部件的安装位置的视频数据。
8.更进一步地,所述曲轴位置传感器跟随船舶轴系的启动同步触发运行,曲轴位置传感器运行实时捕捉船舶轴系中所传动轴的实时转速,并通过设定周期的方式向控制终端周期制反馈捕捉到的传动轴实时转速。
9.更进一步地,所述摄像头模组的视频录制帧数速率与船舶轴系的传动轴转速相适配,所述摄像头模组在船舶轴系非运行状态捕捉船舶轴系的传动轴及其他组成部件的初始状态图像数据,并在初始图像数据中设置比对点位,将摄像头模组中捕捉到的视频数据画面帧中,比对点位当前所处位置与初始图像数据中设置的比对点位所处位置,进行基于画面帧图像数据为参照的位置比对。
10.更进一步地,所述评定模块下级设置有子模块,包括:设定单元,用于设定比对点位的比对安全阈值;记载单元,用于记载比对点位差值;其中,所述设定单元在摄像头模组对初始比对点位及当前比对点位进行比对后,判定比对结果是否处于比对安全阈值内,在判定结果为否时触发报警模块运行。
11.更进一步地,所述记载单元实时记载比对点位差值,在累积记载比对点位差值数据≥10k时向控制终端发送。
12.更进一步地,所述报警模块内部设置有子模块,包括:触发单元,用于获取船舶轴系控制权限控制船舶轴系停止运行;其中,所述触发单元根据触发逻辑触发运行,触发逻辑为:报警模块运行后三十秒内船舶轴系管理人员未在控制终端对船舶轴系进行控制操作。
13.更进一步地,所述采集模块中船舶轴系基础参数中船舶轴系整体跨度的轴系负荷限制条件通过如下公式进行计算,公式为:;式中:为轴系上允许最小荷载;轴系左跨自重;轴系右跨自重;为该轴系两跨上外载荷之和。
14.更进一步地,所述控制终端通过介质电性连接有采集模块及监测模块,所述监测模块下级通过介质电性连接有曲轴位置传感器、分析单元及选择单元,所述分析单元及选择单元通过介质电性连接有摄像头模组,所述监测模块通过介质电性连接有评定模块,所
述评定模块下级通过介质电性连接有设定单元及记载单元,所述记载单元通过介质电性连接有控制终端,所述评定模块通过介质电性连接有报警模块,所述报警模块内部通过介质电性连接有触发单元,所述报警模块通过介质电性连接有溯源模块及反馈模块。
15.有益效果采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:1、本发明提供一种船舶轴系状态监测与故障智能诊断系统,该系统运行时能够有效地对船舶轴系进行具体的参数分析,采用配置轴系转速监测及船舶轴系组成部件图像数据监控的方式来捕捉船舶轴系使用过程中的实时状态,以此来实现船舶轴系的故障检测及诊断,其诊断结果精准,且能够进一步的通过图像数据的采集源头来判定船舶轴系组成部件的故障点,以便于工作人员对于船舶轴系维修工作的开展。
16.2、本发明通过对船舶轴系故障点位的定位,能够有效的提升船舶轴系故障点位确定的时效,从而达到快速解决船舶轴系故障的目的,并且配置了警报功能,在防止船舶轴系故障进一步加剧的同时还能够提示工作人员,确保工作人员及时知晓船舶轴系的实时状况。
17.3、本发明能够的船舶轴系的组成部件中传动轴系的转速进行实时的监控,并通过反馈的方式提供至用户,以便于用户跟更加了解船舶轴系的使用情况,作出一定程度的船舶轴系故障预测以及针对性的维护作业规划,确保船舶轴系在应用过程中能够更加稳定的运行。
附图说明
18.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1为一种船舶轴系状态监测与故障智能诊断系统的结构示意图;图中的标号分别代表:1、控制终端;2、采集模块;3、监测模块;31、曲轴位置传感器;32、分析单元;33、选择单元;34、摄像头模组;4、评定模块;41、设定单元;42、记载单元;5、警报模块;51、触发单元;6、溯源模块;7、反馈模块。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.下面结合实施例对本发明作进一步的描述。
22.实施例1本实施例的一种船舶轴系状态监测与故障智能诊断系统,如图1所示,包括:控制终端1,是系统的主控端,用于发出控制命令;采集模块2,用于采集船舶轴系的基础参数;
监测模块3,用于监测船舶轴系运行及非运行使用环境下的状态;评定模块4,用于评定船舶轴系组成部件当前状态是否正常;报警模块5,用于发出音频警报提示船舶轴系管理人员船舶轴系运行异常;溯源模块6,用于获取评定模块4运行评定结果为异常图像数据对应摄像头模组34,参考该摄像头模组34安装位置确定异常图像数据对应异常船舶轴系组成部件;反馈模块7,用于接收溯源模块6运行结果获取到的异常船舶轴系组成部件并向控制终端1发送;其中,监测模块3下级的曲轴位置传感器31运行同步通过溯源模块6对异常船舶轴系组成部件进行确定。
23.在本实施例中,控制终端1控制采集模块2采集船舶轴系的基础参数,监测模块3实时监测船舶轴系运行及非运行使用环境下的状态,通过评定模块4评定船舶轴系组成部件当前状态是否正常,当评定模块4评定结果为否时,报警模块5启动发出音频警报提示船舶轴系管理人员船舶轴系运行异常,溯源模块6后置运行获取评定模块4运行评定结果为异常图像数据对应摄像头模组34,参考该摄像头模组34安装位置确定异常图像数据对应异常船舶轴系组成部件,最后反馈模块7接收溯源模块6运行结果获取到的异常船舶轴系组成部件并向控制终端1发送。
24.实施例2在具体实施层面,在实施例1的基础上,本实施例参照图1所示对实施例1中一种船舶轴系状态监测与故障智能诊断系统做进一步具体说明:采集模块2中采集的船舶轴系基础参数包括:船舶轴系组成部件生命周期、船舶轴系规格参数,船舶轴系配置船体自重及荷载负重、船舶轴系整体跨度、船舶轴系运行功率。
25.如图1所示,监测模块3下级设置有子模块,包括:曲轴位置传感器31,用于监测船舶轴系的实时转速;分析单元32,用于获取采集模块2运行采集的船舶轴系基础参数,参考船舶轴系基础参数分析摄像头模组34可安装位置;选择单元33,用于获取分析单元32运行分析到的摄像头模组34的可安装位置,参考船舶轴系基础参数中船舶轴系整体跨度参数数据选择摄像头模组34可安装位置进行安装;摄像头模组34,用于捕捉船舶轴系组成部件的安装位置的视频数据。
26.在本实施例中,曲轴位置传感器31运行监测船舶轴系的实时转速,分析单元32获取采集模块2运行采集的船舶轴系基础参数,参考船舶轴系基础参数分析摄像头模组34可安装位置,选择单元33后置运行获取采集模块2运行采集的船舶轴系基础参数,参考船舶轴系基础参数分析摄像头模组34可安装位置,并通过摄像头模组34捕捉船舶轴系组成部件的安装位置的视频数据。
27.如图1所示,曲轴位置传感器31跟随船舶轴系的启动同步触发运行,曲轴位置传感器31运行实时捕捉船舶轴系中所传动轴的实时转速,并通过设定周期的方式向控制终端1周期制反馈捕捉到的传动轴实时转速。
28.如图1所示,摄像头模组34的视频录制帧数速率与船舶轴系的传动轴转速相适配,摄像头模组34在船舶轴系非运行状态捕捉船舶轴系的传动轴及其他组成部件的初始状态
图像数据,并在初始图像数据中设置比对点位,将摄像头模组34中捕捉到的视频数据画面帧中,比对点位当前所处位置与初始图像数据中设置的比对点位所处位置,进行基于画面帧图像数据为参照的位置比对。
29.通过上述的比对,能够准确的判定当前船舶轴系上组成部件是否出现异常,以此来为警报模块5提供运行数据支持。
30.实施例3在具体实施层面,在实施例1的基础上,本实施例参照图1所示对实施例1中一种船舶轴系状态监测与故障智能诊断系统做进一步具体说明:评定模块4下级设置有子模块,包括:设定单元41,用于设定比对点位的比对安全阈值;记载单元42,用于记载比对点位差值;其中,设定单元41在摄像头模组34对初始比对点位及当前比对点位进行比对后,判定比对结果是否处于比对安全阈值内,在判定结果为否时触发报警模块5运行。
31.通过评定模块4下级子模块的设置,可以为评定模块4提供准确的判断逻辑。
32.如图1所示,记载单元42实时记载比对点位差值,在累积记载比对点位差值数据≥10k时向控制终端1发送。
33.如图1所示,报警模块5内部设置有子模块,包括:触发单元51,用于获取船舶轴系控制权限控制船舶轴系停止运行;其中,触发单元51根据触发逻辑触发运行,触发逻辑为:报警模块5运行后三十秒内船舶轴系管理人员未在控制终端1对船舶轴系进行控制操作。
34.如此设置为系统运行控制船舶轴系带来了一定程度的制动效果,以便于为船舶轴系的运行更加智能,且具备一定程度的托管效果。
35.如图1所示,采集模块2中船舶轴系基础参数中船舶轴系整体跨度的轴系负荷限制条件通过如下公式进行计算,公式为:;式中:为轴系上允许最小荷载;轴系左跨自重;轴系右跨自重;为该轴系两跨上外载荷之和。
36.如图1所示,控制终端1通过介质电性连接有采集模块2及监测模块3,监测模块3下级通过介质电性连接有曲轴位置传感器31、分析单元32及选择单元33,分析单元32及选择单元33通过介质电性连接有摄像头模组34,监测模块3通过介质电性连接有评定模块4,评定模块4下级通过介质电性连接有设定单元41及记载单元42,记载单元42通过介质电性连接有控制终端1,评定模块4通过介质电性连接有报警模块5,报警模块5内部通过介质电性连接有触发单元51,报警模块5通过介质电性连接有溯源模块6及反馈模块7。
37.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施
例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。