技术特征:
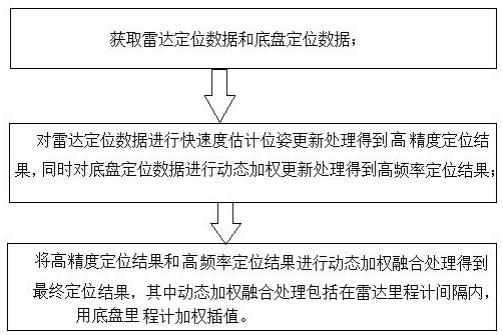
1.一种用于股道内列车车辆高精度检测定位的方法,其特征在于,包括:获取雷达定位数据和底盘定位数据;对雷达定位数据进行快速度估计位姿更新处理得到高精度定位结果,同时对底盘定位数据进行动态加权更新处理得到高频率定位结果;将高精度定位结果和高频率定位结果进行动态加权融合处理得到最终定位结果,其中动态加权融合处理包括:在雷达里程计间隔内,用底盘里程计加权插值;所述高精度表示精度范围≤
±
3cm,所述高频率表示频率至少为50hz。2.根据权利要求1所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,所述雷达定位数据和底盘定位数据的获取方法包括:使移动设备运行在待检机车与沟道之间进行数据采集:所述移动设备装有多个光学传感器、距离传感器、imu传感器和驱动编码器;所述光学传感器和距离传感器用于获取移动设备的雷达定位数据;所述imu传感器和驱动编码器用于获取移动设备的底盘定位数据。3.根据权利要求2所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,所述高精度定位结果获取方法包括:s1,对雷达定位数据进行基本滤波预处理得到预处理数据;s2,基于预处理数据维护雷达定位数据内的线面特征与移动设备之间的位姿变化估计出雷达位姿数据,同时对雷达位姿数据中当前视野内的线面特征与历史数据库中的线面特征进行匹配,进而更新雷达定位数据得到高精度定位结果;包括过程:以维护一张局部的实时三维特征地图的方式,基于线面匹配算法和帧间匹配算法实时更新雷达定位数据;其中,以单帧数据形式进行帧间匹配算法,寻找出两帧数据间的重合部分用来更新雷达定位数据。4.根据权利要求3所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,雷达位姿数据估计方法包括:以单帧点云数据形式对预处理数据进行线面特征提取得到面特征点集和线特征点集;其中当单帧点云数据内的面特征点数量小于阈值u时,舍弃本帧计算结果,并缓存当前帧数据用以和下一帧数据合并计算;比较两帧数据面特征点集和线特征点集的差异从而估计出雷达位姿数据。5.根据权利要求4所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,面特征点集和线特征点集的提取方法包括:从单帧点云数据中按数据编号取连续的点a、点b、点c、点d和点e;取点c计算点c与其他4个点构成空间向量和的长度l,;如果l小于阈值m,则认为点c属于面特征点集,阈值m根据曲面的曲率确定;当存在任一点f(x,y,z),点f-2在点f-3、点f-4、点f-1和点f形成的曲面t1上,点f 2在点f 3、点f 4、点f 1和点f形成的曲面t2上;计算两曲面的共面向量点乘结果k,若丨k丨小于阈值g,则认为点f属于线特征点集;阈值g根据两面夹角度数确定;
。6.根据权利要求5所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,高频率定位结果获取方法包括:基于底盘定位数据获取imu姿态数据,并以imu姿态数据作为高频率定位结果;在更新雷达定位数据时,基于雷达位姿数据与底盘姿态数据的差异,动态加权的更新到imu姿态数据和imu姿态数据置信度上;其中加权值的取值条件包括:雷达位姿数据与底盘姿态数据的差异和底盘姿态数据的置信度。7.根据权利要求6所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,动态加权的过程遵循逻辑:底盘姿态置信度与累计角度变化量成反比,当累计角度变化量达到设定阈值,根据imu姿态数据置信度动态更新底盘姿态数据的权值;imu姿态数据与底盘姿态数据的差异变化曲率与imu姿态数据置信度成反比。8.根据权利要求1所述的一种用于股道内列车车辆高精度检测定位的方法,其特征在于,最终定位结果获取方法包括:雷达里程计更新输出为高精度定位结果,底盘里程计更新输出为高频率定位结果;在雷达里程计更新后,加权地将雷达里程计与底盘里程计的定位结果差值,更新到最终定位结果上,在下一次雷达里程计数据更新前,底盘里程计持有最终定位结果的更新权,当雷达里程计再次更新时,再次加权更新雷达里程计与底盘里程计的定位结果差值到底盘里程计上。9.一种用于股道内列车车辆高精度检测定位的系统,其特征在于,用于实现权利要求1-8任一所述的用于股道内列车车辆高精度检测定位的方法,包括:采集模块,用于获取雷达定位数据和底盘定位数据;计算模块,用于对雷达定位数据进行快速度估计位姿更新处理得到高精度定位结果,同时对底盘定位数据进行动态加权更新处理得到高频率定位结果;融合模块,用于将高精度定位结果和高频率定位结果进行动态加权融合得到最终定位结果,其中动态加权融合过程包括:在雷达里程计间隔内,用底盘里程计加权插值。10.根据权利要求9所述的一种用于股道内列车车辆高精度检测定位的系统,其特征在于,所述采集模块包括:运行在待检机车与沟道之间进行数据采集的移动设备;所述移动设备装有多个光学传感器、距离传感器、imu传感器和驱动编码器;所述光学传感器和距离传感器用于获取移动设备的雷达定位数据;所述imu传感器和驱动编码器用于获取移动设备的底盘定位数据。
技术总结
本发明公开了一种用于股道内列车车辆高精度检测定位的方法及系统,涉及机车检测技术领域,获取雷达定位数据和底盘定位数据;对雷达定位数据进行快速度估计位姿更新处理得到高精度定位结果,同时对底盘定位数据进行动态加权更新处理得到高频率定位结果;本发明方法在雷达里程计间隔内,用底盘里程计加权插值,以提高定位数据频率,降低了雷达里程计数据的跳变,同时在雷达里程计更新后,消除了部分底盘里程计的累计误差;最终得到了一个在长距离环境下,高频高精度的最终定位结果。高频高精度的最终定位结果。高频高精度的最终定位结果。
技术研发人员:卜显利 邓雪 苏宇鑫 严春宏 纪文杰
受保护的技术使用者:成都运达科技股份有限公司
技术研发日:2022.11.24
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。