1.本技术涉及自动化技术领域,尤其涉及一种松不脱螺钉及支持松不脱螺钉自动化装配的方法。
背景技术:
2.松不脱螺钉广泛应用于机械加工行业,对于非固定场景的松不脱螺钉,采用的松不脱螺钉大都需要采用工具来进行拧紧或者拆卸操作,松不脱螺钉的装配依靠人工装配,松不脱螺钉外壳的准确定位与识别无法实现,自动化装配难以通过机械设备自动化装配,目前人工装配成本高、效率低、质量不稳定,甚至存在某些特定危险场景不适合人工操作。
技术实现要素:
3.本发明要解决的技术问题在于提供这样的可能性,设计了一种可用于视觉测量的带有编码点和/或定位圆的松不脱螺钉外壳,实现松不脱螺钉识别和/或定位,使得松不脱螺钉可以实现自动化的识别、定位与装配,提高机械操作的精度与效率。
4.本发明的第一目的提供了一种松不脱螺钉,松不脱螺钉包括:定位模块,定位模块包括设置在松不脱螺钉表面的若干个环形边界轮廓形成的定位圆;和/或,识别模块,识别模块包括设置在松不脱螺钉的外壳顶部环形区域的若干个编码点构成的编码带。
5.在本发明的一实施例中,编码点在顶部环形区域等间隔分布,编码点的间隔按照编码点的数量进行设定,优选地编码点可以沿着环形区域形成的探测圆圆周均匀分布。
6.在本发明的一实施例中,松不脱螺钉的若干个编码点对应用于识别松不脱螺钉的编码数值。
7.本发明的第二发明提供了一种支持松不脱螺钉自动化装配的方法,松不脱螺钉上安装前述的定位模块和/或识别模块,包括下述步骤:
8.获取松不脱螺钉外壳的原始图像,原始图像包括定位圆图像和/或编码点图像;
9.对定位圆图像和/或编码点图像进行第一预处理和/或第二预处理实现自动化定位和/或自动化识别,以支持松不脱螺钉自动化装配。
10.在本发明的一实施例中,对定位圆图像进行第一预处理包括:
11.获取定位圆图像中的定位圆圆心的像素坐标,
12.根据像素坐标计算预设坐标系中的三维坐标;实现松不脱螺钉的自动定位。
13.在本发明的一实施例中,对编码点图像进行第二预处理包括:
14.对原始图像进行预处理,增强原始图像的对比度,获取预处理图像;
15.提取预处理图像的轮廓信息;
16.对轮廓信息进行椭圆拟合,获取椭圆中心的像素坐标、长短轴像素尺寸进行聚类,获取编码点聚类和/或定位圆聚类。
17.在本发明的一实施例中,获取编码点聚类和/或定位圆聚类之后包括:
18.对编码点聚类的轮廓点及中心点进行透视变换得到编码点正投影聚类,根据编码
点正投影聚类获取编码带中心点的中心像素坐标;
19.对预处理图像进行透视变换得到正投影图像,根据正投影图像的圆心坐标及中心像素坐标设置若干个编码点;
20.选定起始编码点,优选地,只需要以任意一点作为起始点进行查找,得到一组二进制编码值,再对其循环左移一位,得到8组二进制编码序列,其中对应的十进制值最小的即为编码值,不需要再对其余7个探测点轮流作为起始位进行8位二进制编码的生成;
21.以起始编码点为起点依次比较若干个编码点的第一灰度值与全局平均灰度的数值,获取比较结果;
22.根据比较结果,生成该编码点序列对应的二进制编码;
23.根据预设规则对二进制编码进行移位处理,得到最小十进制编码值即为该编码靶标对应的编码数值,实现松不脱螺钉的自动识别。
24.在本发明的一实施例中,以起始编码点为起点依次比较若干个编码点的第一灰度值与全局平均灰度的数值,获取比较结果包括:
25.获取正投影图像中所有像素点的全局平均灰度;
26.以起始编码点为起点,依次分别检测探测编码点并获取第一灰度值;判断第一灰度值是否小于平均灰度;
27.若是,标记编码点的编码位为0;
28.若否则,标记编码点的编码位为1。
29.在本发明的一实施例中,根据预设规则对二进制编码进行移位处理,得到最小十进制编码值即为该编码靶标对应的编码数值包括:将比较结果生成的每一个编码序列按照循环左移一位的预设移位规则进行移位处理,获取移位处理后的编码数值,保存各个编码点对应的编码数值的对应的十进制数值的最小值为即为该编码靶标对应的编码数值。
30.与现有技术相比,本发明至少具备的有益技术效果:
31.本发明通过在松不脱螺钉外壳设置包括定位圆的定位模块和/或编码点的识别模块,基于定位模块获取定位圆图像坐标点实现高精度定位;基于设置若干个编码点的编码带来实现编码数值与松不脱螺钉的映射关系,精准识别松不脱螺钉;通过本技术的技术方案使得松不脱螺钉可以实现自动化的识别、定位与装配,提高机械操作的精度与效率,有助于实现高精度机械装配、拆卸、维修等领域的自动化。
附图说明
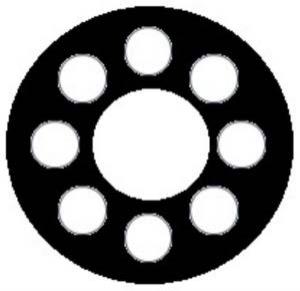
32.图1a和图1b分别示出了带有编码及定位圆的松不脱螺钉外壳图;
33.图2示出了松不脱螺钉外壳顶部的定位圆示意图;
34.图3示出了松不脱螺钉外壳顶部的编码点示意图;
35.图4a和图4b分别示出了带有编码及定位圆的松不脱螺钉外壳图像预处理靶标图像;
36.图5a和图5b分别示出了带有编码及定位圆的松不脱螺钉外壳图像预处理图像的椭圆轮廓;
37.图6示出了椭圆轮廓拟合示意图;
38.图7示出了松不脱螺钉外壳图像预处理图像的正投影的靶标图像;
39.图8示出了确定靶标编码中心示意图;
40.图9示出了探测圆探测点示意图。
41.1—编码点椭圆轮廓;2—定位圆椭圆轮廓
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.需要说明的是,术语“和/或”被用作表明两个词语或表达被一起采用或单独采用的功能词,例如a和/或b包含单独a、单独b以及a与b一起。
44.本技术实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
45.为能进一步了解本发明的发明内容、特点及功效,以下实施例,并配合附图详细说明如下:
46.参照图1a和图1b、图2和图3,一种松不脱螺钉外壳包括定位模块,其中定位模块包括设置在松不脱螺钉表面的若干个环形边界轮廓形成的定位圆;和/或,识别模块,其中识别模块包括设置在松不脱螺钉的外壳顶部环形区域的若干个编码点构成的编码带。
47.在一实施例中,利用松不脱螺钉外壳的外形特征设置定位模块和/或识别模块,设置一种带有若干个编码点形成编码带的松不脱螺钉外壳和/或一种带有定位标志定位圆的松不脱螺钉外壳。
48.在一实施例中,定位模块在松不脱螺钉外壳通过表面加工黑白环形带的形式,以其黑白边界轮廓作为定位圆。
49.在一实施例中,识别模块在松不脱螺钉外壳通过将其顶部环形区域作为编码带并加工为黑色,编码带上设置有点式分布式编码点。
50.在一实施例中,编码点在顶部环形区域等间隔分布,具体地编码带形成的探测圆的圆周可以按照一定的间距或者角度等均匀地划分出若干个编码点。
51.在一实施例中,可以将编码带以45
°
均匀分出8个编码点,编码点用于提供编码数值信息,表示十位二进制编码,每个编码点可以是黑色或白色,将黑色编码点的编码位设置为二进制编码”0”,由于编码带为黑色,所以黑色编码点在编码带中不显示轮廓,将白色编码点的编码位设置为二进制编码“1”,用于松不脱螺钉的识别
52.在一实施例中,定位圆通过在松不脱螺钉外壳顶部加工黑白环形带的形式实现,以其边界轮廓作为定位圆,通过定位圆实现提供位置信息,用于松不脱螺钉的定位。
53.在一实施例中,松不脱螺钉的若干个编码点对应用于识别松不脱螺钉的编码数值,若干个编码点对应的编码位生成编码序列,根据编码序列筛选合适的编码数值,该编码数值用于识别松不脱螺钉。
54.参照图4a和图4b所示,获取松不脱螺钉外壳的原始图像,原始图像包括定位圆图像和/或编码点图像。首先通过相机获取包含若干个编码点的编码带和/或定位圆的松不脱
螺钉外壳图像。
55.在一实施例中,对定位圆图像进行第一预处理实现松不脱螺钉的自动化定位,以支持自动化装配。
56.在一实施例中,进行第一预处理包括获取定位圆图像中的定位圆圆心的像素坐标,根据像素坐标计算预设坐标系中的三维坐标;实现松不脱螺钉的自动定位。
57.其中,获取定位圆图像中的定位圆圆心的像素坐标可以基于图像处理方法获取。
58.在一实施例中,预设坐标系中的三维坐标可以利用定位圆圆心的像素坐标通过摄影测量、双目立体测量等方法计算在测量坐标系或世界坐标系中的三维坐标,实现松不脱螺钉的定位
59.参照图4a和图4b所示,获取松不脱螺钉外壳的原始图像,原始图像包括定位圆图像和/或编码点图像。首先通过相机获取包含若干个编码点的编码带和/或定位圆的松不脱螺钉外壳图像。
60.参照图5至9所示对编码点图像进行第二预处理实现松不脱螺钉的自动化识别,以支持自动化装配。
61.在一实施例中,对编码点图像进行第二预处理包括对包括定位圆图像和/或编码点图像的原始图像进行降噪滤波等预处理,增强原始图像的对比度,以增强定位圆和/或编码点边缘轮廓的对比度,获取预处理图像标记image1;对预处理图像image1进行边缘检测,提取预处理图像image1的轮廓信息;对轮廓信息进行椭圆拟合,获取椭圆中心的像素坐标、长短轴像素尺寸,对图像中的椭圆根据长短轴尺寸、中心间距进行聚类,得到编码点聚类cluster_code1和/或定位圆聚类cluster_location1。
62.其中,椭圆拟合时的轮廓信息可以为定位圆和/或编码点对应的边缘轮廓。
63.具体地,椭圆的计算公式如下:
[0064][0065]
其中(x0,y0)为在图片的像素坐标系下的椭圆中心坐标,a为椭圆长半轴,b为椭圆的短半轴,θ为椭圆长轴与x轴正半轴的夹角,下式为:
[0066][0067][0068][0069][0070][0071]
可将椭圆公式转化为:
[0072]
ax2 bxy cy2 dx ey f=0
[0073]
则椭圆中心坐标可表示为:
[0074][0075]
在一实施例中,获取编码点聚类和/或定位圆聚类之后包括:对编码点聚类的轮廓点及中心点进行透视变换得到编码点正投影聚类,根据编码点正投影聚类获取编码带中心点的中心像素坐标;对预处理图像进行透视变换得到正投影图像,根据正投影图像的圆心坐标及中心像素坐标设置若干个编码点;选定起始编码点;以起始编码点为起点依次比较若干个编码点的第一灰度值与全局平均灰度的数值,获取比较结果;根据比较结果,生成若干个编码点作为起始编码点对应的若干个编码序列;选择满足预设条件的编码序列对应的编码数值,实现松不脱螺钉的自动识别。
[0076]
具体地,获取椭圆拟合时后编码点聚类和/或定位圆聚类之后进一步包括计算定位圆聚类中椭圆的外接矩形四个顶点的像素坐标,根据四个顶点像素坐标值按照预设公式计算,将投影椭圆变换成正投影圆形的透视变换矩阵m;对图像image1进行透视变换得到预处理图像的正投影的靶标图像标记为正投影图像image2,对编码点聚类cluster_code1的轮廓点与中心点进行透视变换得到编码点正投影聚类cluster_code2;
[0077]
将image1乘以透视变换矩阵m,得到正投影图像image2:
[0078]
image2=image1
·m[0079]
将编码点聚类cluster_code1乘以透视变换矩阵m,得到编码点正投影聚类。cluster_code2:cluster_code2=cluster_code1
·m[0080]
在一实施例中,根据编码点正投影聚类获取编码带中心点的中心像素坐标;根据正投影图像的圆心坐标及中心像素坐标设置若干个编码点。
[0081]
具体地,计算编码点正投影聚类中任意两个编码点连线的中垂线,并计算中垂线的两两交点,计算所有交点的像素坐标均值即为编码带中心点的像素坐标;计算所有编码点正投影圆圆心与编码带中心的像素欧氏距离的均值,以此为半径r,以编码带中心点为圆心o,在正投影图像image2中确定一个探测圆,任选一个编码点的中心点作为编码点1,以编码点1为起始点绕圆心o遍历360
°
,每隔45
°
在探测圆上取一个编码点,依次记为编码点2、编码点3、编码点4、编码点5、编码点6、编码点7、编码点8,共取到8个编码点,该8个编码点沿探测圆圆周等间隔均匀分布。
[0082]
在一实施例中,依次比较编码点的第一灰度值与全局平均灰度的数值,获取比较结果;根据比较结果,生成编码点的编码数值;根据编码数值,实现松不脱螺钉的自动识别。
[0083]
在一实施例中,获取正投影图像中所有像素点的全局平均灰度;以起始编码点为起点,依次分别检测探测编码点并获取第一灰度值;判断第一灰度值是否小于平均灰度;若是,标记编码点的编码位为0;
[0084]
若否则,标记编码点的编码位为1,根据每一个探测编码点的灰度比较值的结果,获取对应探测编码点的编码位数值为“0”或”1”,并保存各个编码位数值,最终生成若干位的二进制编码序列。
[0085]
具体地,计算image2中所有像素点的全局平均灰度,随意选取一个编码点为起始
位,顺时针读取可以产生1个8位二进制数编码,并依次分别检测8个探测点,如果探测点第一灰度值小于平均灰度则记该编码位为0,如果第一灰度值大于等于平均灰度则记该编码位为1,只需要以任意一点作为起始点进行查找,编码点2、编码点3、编码点4、编码点5、编码点6、编码点7、编码点8的第一灰度值比较后,生成8组对应的二进制编码序列,得到一组二进制编码值,再对其循环左移一位,得到8组二进制编码序列,其中对应的十进制值最小的即为编码值,不需要再对其余7个探测点轮流作为起始位进行8位二进制编码的生成。
[0086]
选定起始编码点,以起始编码点为起点依次比较若干个编码点的第一灰度值与全局平均灰度的数值,获取比较结果;根据比较结果,生成该编码点序列对应的二进制编码;根据预设规则对二进制编码进行移位处理,得到最小十进制编码值即为该编码靶标对应的编码数值实现松不脱螺钉的自动识别。
[0087]
在一实施例中,对于起始编码点按探测圆圆周的编码点进行比较的方向不做限定,可以沿着逆时针或顺时针进行比较标记。
[0088]
在一实施例中,生成编码点的编码数值包括:将比较结果对应生成的每一个编码序列按照预设移位规则进行移位处理,获取移位处理后的编码数值,保存各个编码点对应的编码数值的对应的十进制数值的最小值为编码数值。
[0089]
具体地,预设移位规则可以为将该八位二进制编码依次循环左移1位,并计算其对应的十进制编码值,依次比较所有编码序列移位后形成的所有十进制编码数值,找到所有十进制编码数值的最小值即为该螺钉的编码值,从而实现了松不脱螺钉的识别。
[0090]
在一实施例中,将松不脱螺钉外壳顶部环形区域作为编码带并加工为黑色,将编码带以45
°
均匀分出8个编码点,表示八位二进制编码,每个编码点可以是黑色或白色,将黑色编码点设置为二进制编码“0”,将编码带设置黑色,使得黑色编码点在编码带中不显示轮廓,将白色编码点设置为二进制编码“1”,随意选取一个编码点为起始位,顺时针读取可以产生1个8位二进制数编码,再对其循环左移一位,得到8组二进制编码序列,编码点所对应的编码数值为这8个二进制数中的最小值,根据编码数值的最小值,实现松不脱螺钉的自动识别。
[0091]
具体地,8位二进制数值的确定只需要以任意一点作为起始点进行查找,编码点2、编码点3、编码点4、编码点5、编码点6、编码点7、编码点8的第一灰度值比较后,生成8组对应的二进制编码序列,得到一组二进制编码值,再对其循环左移一位,得到8组二进制编码序列,其中对应的十进制值最小的即为编码值,不需要再对其余7个探测点轮流作为起始位进行8位二进制编码的生成,即可确定得到最小十进制编码值即为该编码靶标对应的编码数值,从而实现松不脱螺钉的自动识别。
[0092]
基于较为复杂的安装应用场景,对松不脱螺钉的自动化安装需要同时设置定位模块和识别模块,编码点图像进行第二预处理实现松不脱螺钉的自动化识别后,如果需要进一步地定位,此时对定位圆图像进行第一预处理实现松不脱螺钉的自动化定位,以支持自动化装配;其实现步骤与前述相同,在此不做赘述。
[0093]
根据上述说明书的揭示和教导,以上所述仅是对本发明的较佳实施例而已,本发明所属领域的技术人员还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为
了方便说明,并不对本发明构成任何限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
