1.本实用新型涉及清洁设备技术领域,尤其涉及一种清洁效果好的清洁机器人。
背景技术:
2.扫地机、扫拖一体机、擦地机、洗地机、清洁机器人等清洁装置一般通过其底部的拖擦盘对地面进行擦拭,实现清洁目的。由于拖擦盘在清洁过程中会越拖越脏,当清洁机器人结束清洁工作或需要清洗拖擦盘或需要充电而返回基站的过程中,已经变脏的拖擦盘会与地面接触而将地面弄脏,可能需要用户手动清洁被弄脏的地面,不利于提高用户的使用体验。另外,当地面上覆盖有地毯时,若清洁机器人的拖擦盘对地毯进行拖擦反而会使地毯受污变脏,不利于提高用户的使用体验。
技术实现要素:
3.为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种清洁效果好的清洁机器人,清洁电机可以通过转轴带动拖擦盘升降,使拖擦盘可以适时升高,避免拖擦盘污染地毯或已经清洁的表面。
4.为了实现上述技术目的,本实用新型提供的一种清洁效果好的清洁机器人,包括拖擦件及用于驱动拖擦件水平旋转的驱动组件,拖擦件包括拖擦盘,驱动组件包括清洁电机及转轴,转轴竖置且由清洁电机驱动,所述转轴的输出端设有外螺纹段,拖擦盘的中心处设有内螺纹段,内螺纹段与外螺纹段配合且两者的螺纹齿之间具有间隙,以使清洁电机正转时带动拖擦盘下降至拖擦位置、清洁电机反转时带动拖擦盘上升至高于拖擦位置的抬升位置。
5.优选的,所述内螺纹段与外螺纹段之间的轴向间隙为0.1mm~0.2mm;和/或,所述内螺纹段与外螺纹段之间的单侧径向间隙为0.15mm~0.3mm。
6.优选的,所述外螺纹段的顶部设有用于限制拖擦盘上升行程的上限位部,外螺纹段的底部设有用于限制拖擦盘下降行程的下限位部。
7.优选的,所述上限位部包括设于外螺纹段上方的上挡筋,拖擦盘上升至与上挡筋抵触则到达抬升位置;或者,所述上限位部包括与外螺纹段顶端对应的上止动面,拖擦盘上升至内螺纹段的顶端与上止动面抵触则到达抬升位置。
8.优选的,所述下限位部包括设于外螺纹段下方的下挡筋,拖擦盘下降至与下挡筋抵触则到达拖擦位置;或者,所述下限位部包括与外螺纹段底端对应的下止动面,拖擦盘下降至内螺纹段的底端与下止动面抵触则到达拖擦位置。
9.优选的,所述转轴的输出端设有轴头,外螺纹段及上限位部设于轴头上。
10.优选的,所述轴头的底部设有限位件,下限位部设于限位件上。
11.优选的,所述限位件与轴头通过螺钉连接于转轴,限位件与轴头之间设有定位配合结构,螺钉穿经定位配合的限位件和轴头并拧紧于转轴;或者,所述限位件固定连接于转轴且将轴头固定于转轴的输出端。
12.优选的,所述拖擦盘的拖擦位置与抬升位置之间的高度差为2mm~15mm。
13.优选的,所述拖擦件间隔设有两个,转轴间隔设有两根且分别与两个拖擦件对应设置,清洁电机正转通过两根转轴驱动两个拖擦件相向转动,清洁电机反转通过两根转轴驱动两个拖擦件背向转动。
14.采用上述技术方案后,本实用新型具有如下优点:
15.1、本实用新型提供的清洁机器人,拖擦盘与转轴的下端之间通过内螺纹段与外螺纹段的配合连接在一起,内、外螺纹段的螺纹齿之间具有间隙,使内、外螺纹段可以相对转动。清洁电机正转时,转轴通过内、外螺纹段的配合带动拖擦盘下降至拖擦位置,使拖擦盘在清洁机器人移动时可以对待清洁面进行拖擦实现清洁目的。清洁电机反转时,转轴通过内、外螺纹段的配合带动拖擦盘上升至抬升位置,由于抬升位置高于拖擦位置,处于抬升位置的拖擦件不会与地毯等不宜拖擦的物品接触,避让物品因拖擦件的拖擦而受污变脏的情况,有利于提高用户的使用体验。清洁机器人返回基站过程中,处于抬升位置的拖擦件不会接触已经清洁的表面,避免造成二次污染导致需要用户手动清理的情况,有利于提高用户的使用体验。
16.2、合理设置内螺纹段与外螺纹段之间的轴向间隙与单侧径向间隙,使内、外螺纹段能顺利相对转动。若轴向间隙小于0.1mm或单侧径向间隙小于0.15mm,内、外螺纹段容易因间隙过小而相互卡死,不利于保证拖擦盘的顺利升降。若轴向间隙大于0.2mm或单侧径向间隙大于0.3mm,内、外螺纹段之间的间隙过大,转动的转轴不易通过内、外螺纹段的配合顺利带动拖擦盘升降。
17.3、利用上限位部和下限位部限制拖擦盘上升、下降时的移动行程,使拖擦盘只能在拖擦位置和抬升位置之间移动,有利于保证拖擦盘的结构稳定性。
18.4、上限位部具体可以设置为上挡筋,也可以设置为上止动面。下限位部具体可以设置为下挡筋,也可以设置为下止动面。合理设置上限位部与下限位部的具体结构,使其满足限制拖擦盘移动行程的结构要求。
19.5、外螺纹段及上限位部优选设于轴头上,下限位部优选设于轴头底部的限位件上,合理设置外螺纹段、上限位部及下限位部的设置位置,有利于合理减小转轴、轴头及限位件的成型难度。
20.6、通过定位配合结构使限位件与轴头在固定时保持定位配合,避免限位件和轴头在通过螺钉与转轴固定时发生错位的情况,保证外螺纹段与下限位部之间的相对位置状态。限位件也可以直接与转轴进行固定,此时,限位件将轴头固定于转轴的输出端,有利于合理简化结构。
21.7、合理设置拖擦盘的拖擦位置与抬升位置之间的高度差,使拖擦盘可以满足避让要求。若两者之间的高度差小于2mm,拖擦盘抬升的高度较小,不利于满足充分避让地毯、避免污染已清洁表面等要求。若两者之间的高度差大于15mm,拖擦盘自拖擦位置上升至抬升位置时的移动高度较大,机体底部需要预留出较多的空间供拖擦盘升降,机体的整体高度较大,不利于合理减小清洁机器人的外形尺寸。
22.8、拖擦件间隔分布两个,清洁电机正转时通过两根转轴驱动两个拖擦件相向转动,使处于拖擦位置的两个拖擦件在擦拭待清洁面时可以将脏污朝中间聚拢,以便脏污被吸入机体内部的尘盒中,有利于提高机体的清洁效果。
附图说明
23.图1为实施例一清洁机器人的整体结构图;
24.图2为实施例一清洁机器人的仰视图;
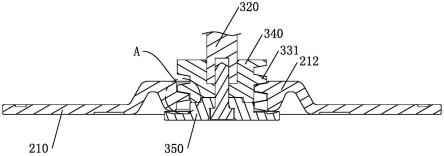
25.图3为实施例一清洁机器人中拖擦盘处于拖擦位置时的局部结构图;
26.图4为图3中a处的放大图;
27.图5为实施例一清洁机器人中拖擦盘处于抬升位置时的局部结构图;
28.图6为实施例一清洁机器人中转轴、轴头、拖擦盘及限位件的爆炸图;
29.图7为实施例一清洁机器人中轴头的结构图;
30.图8为实施例一清洁机器人中限位件的结构图;
31.图9为实施例二清洁机器人中拖擦盘处于拖擦位置时的局部结构图;
32.图10为实施例二清洁机器人中拖擦盘处于抬升位置时的局部结构图。
33.图中,100-机体,200-拖擦件,210-拖擦盘,211-内螺纹段,212-凸台,213-通孔,220
‑ꢀ
拖布,310-清洁电机,320-转轴,321-固定孔,331-外螺纹段,332-上止动面,333-下止动面,334-上挡筋,335-下挡筋,340-轴头,341-轴孔,342-穿孔,343-定位沉孔,350-限位件,351-连接孔,352-止动筋,353-定位台,354-定位筋,360-减速箱。
具体实施方式
34.下面结合附图和具体实施例对本实用新型作进一步说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
35.实施例一
36.如图1至图8所示,本实用新型实施例一提供的一种清洁效果好的清洁机器人,包括拖擦件200及用于驱动拖擦件200水平旋转的驱动组件,拖擦件200包括拖擦盘210,驱动组件包括清洁电机310及转轴320,转轴320竖置且由清洁电机310驱动。转轴320的输出端设有外螺纹段331,拖擦盘210的中心处设有内螺纹段211,内螺纹段211与外螺纹段331配合且两者的螺纹齿之间具有间隙,以使清洁电机310正转时带动拖擦盘210下降至拖擦位置、清洁电机310反转时带动拖擦盘210上升至高于拖擦位置的抬升位置。
37.内、外螺纹段的螺纹齿之间具有间隙,使内、外螺纹段可以相对转动。处于拖擦位置的拖擦件在清洁机器人移动时可以对待清洁面进行拖擦,由于抬升位置高于拖擦位置,处于抬升位置的拖擦件不会与地毯等不宜拖擦的物品接触,避让物品因拖擦件的拖擦而受污变脏的情况,有利于提高用户的使用体验。清洁机器人返回基站过程中,处于抬升位置的拖擦件不会接触已经清洁的表面,避免造成二次污染导致需要用户手动清理的情况,有利于提高用户的使用体验。
38.结合图1、图2,本实施例中,拖擦件200设于机体100底部的后侧,拖擦件200还包括设于拖擦盘210底部的拖布220。拖擦件200沿左右方向间隔设有两个,相应的,转轴320 沿左右方向间隔设有两根,两根转轴320分别与两个拖擦件200对应设置。清洁电机310正转时通过两根转轴320驱动两个拖擦件200相向转动,清洁电机310反转时通过两根转轴320 驱
动两个拖擦件200背向转动。具体的,清洁电机310轴向横置的设于机体100内,驱动组件还包括减速箱360,减速箱360设有两个且分别设于清洁电机310的轴向两端,两根转轴 320分别为两个减速箱360的输出轴,清洁电机310的电机轴的两端伸入两个减速箱360内并输入动力,电机轴通过减速箱360内的传动结构驱动转轴320转动,转轴320的下端为输出端。清洁电机310正转时,右侧的转轴驱动右侧的拖擦件200沿ω方向转动,左侧的转轴驱动左侧的拖擦件200沿ω’方向转动,两个拖擦件200在拖擦待清洁面时朝向清洁机器人的中轴线l向内相向转动,可以将脏污朝中间聚拢,以便脏污被吸入机体100内部的尘盒中。清洁电机310反转时,右侧的转轴驱动右侧的拖擦件200沿ω’方向转动,左侧的转轴驱动左侧的拖擦件200沿ω方向转动,两个拖擦件200背向清洁机器人的中轴线l向外背向转动。
39.结合图3、图4,内螺纹段211与外螺纹段331之间设有轴向间隙δs和径向间隙,为了使转轴320能通过内、外螺纹段211、331的配合顺利带动拖擦件200升降,需合理设置内、外螺纹段211、331之间的轴向间隙δs和径向间隙的大小,轴向间隙δs为0.1mm~0.2mm,内、外螺纹段211、331之间的单侧径向间隙δr为0.15mm~0.3mm。本实施例中,内、外螺纹段211、331之间的轴向间隙δs优选设置为0.12mm,内、外螺纹段211、331之间的单侧径向间隙δr优选设置为0.2mm。
40.结合图6、图7,为了降低转轴320的成型难度,转轴320的输出端设有轴头340,外螺纹段331设于轴头340的周向外壁上。拖擦盘210的中心处设有轴向高度增大的凸台212,凸台212的中心处设有通孔213,内螺纹段211设于通孔213的孔壁上。结合图8,轴头340 的底部设有限位件350,限位件350和轴头340通过螺钉固定于转轴320的下端。具体的,转轴320设有自底面向上延伸的固定孔321,轴头340设有与转轴320下端配合的轴孔341 及供螺钉穿过的穿孔342,限位件350设有与螺钉配合的连接孔351。组装时,轴头340通过轴孔341套设于转轴320的下端,螺钉穿过限位件350上的连接孔351和轴头340上的穿孔 342后拧紧于固定孔321中。轴孔341与转轴320下端之间优选采用非圆形轴孔配合结构实现轴头341与转轴320之间的周向定位,轴孔341的内径大于穿孔342的内径且轴孔341与穿孔342相互连通,连接孔351为上细下粗的阶梯孔,螺钉拧紧后螺钉的头部位于连接孔351 的下部内。
41.为了使限位件350和轴头340在通过螺钉与转轴320固定时保持相对稳定,限位件350 与轴头340之间设有定位配合结构。结合图6、图8,本实施例中,限位件350的顶面设有向上凸出的定位台353及沿径向延伸的定位筋354,定位筋354朝向限位件350中心的一端与定位台353相接,轴头340的底面设有与定位台353配合的定位沉孔343及与定位筋354配合的定位槽,定位槽与定位沉孔343连通。组装时,定位台353嵌于定位沉孔343中使轴头 340与限位件350相互受到轴向定位,定位筋354嵌于定位槽中使轴头340限位件350相互受到径向定位,避免限位件350和轴头340发生错位。
42.为了限制拖擦盘210的升降幅度,外螺纹段331的顶部设有用于限制拖擦盘210上升行程的上限位部,外螺纹段331的底部设有用于限制拖擦盘210下降行程的下限位部。本实施例中,上限位部为上止动面332,上止动面332与外螺纹段331的顶端对应。下限位部优选设于限位件350上,下限位部具体为与外螺纹段331的底端对应的下止动面333。具体的,限位件350设有位于外螺纹段331下端的止动筋352,止动筋352朝向外螺纹段331底端的表面即为下止动面333。结合图5,清洁电机310反转使转轴320带动拖擦盘210上升过程中,当内螺纹段211转动至其顶端与上止动面332接触时,拖擦盘210上升到位并处于抬升位置,拖
布220随拖擦盘210升高。结合图3,清洁电机310正转使转轴320带动拖擦盘210下降过程中,当内螺纹段211转动至其底端与下止动面333接触时,拖擦盘210下降到位而处于拖擦位置,拖布220随拖擦盘210下降并与待清洁面接触,清洁电机310继续正转使转轴320 驱动拖擦件200水平转动,使拖布220对待清洁面进行拖擦。
43.为了使拖擦件200可以满足避让要求,拖擦盘210的拖擦位置与抬升位置之间的高度差δh为2mm~15mm。结合图5,图中的虚线d表示拖擦盘210处于拖擦位置时底面的高度位置,拖擦盘210的拖擦位置与抬升位置之间的高度差δh优选设置为4mm。
44.清洁机器人工作时,拖擦盘210处于拖擦位置,清洁电机310正转使转轴320驱动拖擦件水平旋转,使拖布220可以有效拖擦待清洁面。
45.当清洁机器人检测到待清洁面为地毯等不宜拖擦区域时,或者,当清洁机器人需要返回基站时,清洁电机310反转,转轴320转动使内螺纹段211相对于外螺纹段331向上移动,从而使拖擦盘210带动拖布220升高,当内螺纹段211转动至与上止动面332接触时,拖擦盘210上升到位并处于抬升位置,此时,拖布220与地毯或已清洁表面之间具有一定的空隙,避免拖布220污染地毯或已清洁表面。
46.当清洁机器人越过地毯等不宜拖擦区域时,或者,当清洁机器人移动至清洁位置时对待清洁面进行清洁时,清洁电机310正转,转轴转动320使内螺纹段211相对于外螺纹段331 向下移动,从而使拖擦盘210带动拖布220下降,当内螺纹段211转动至与下止动面333接触时,拖擦盘210下降到位并处于拖擦位置,清洁电机310继续正转并通过转轴320驱动拖擦盘210水平转动,两个拖擦盘210向内相向转动使拖布220对待清洁面进行拖擦。
47.可以理解的是,清洁机器人的其他结构参考现有技术,如机体100底部的前侧设置两个左右分布的边刷、机体的底部设置进尘口且机体内部设置集尘组件等。
48.可以理解的是,清洁电机310也可以设置两个,清洁电机310优选为减速电机,此时,转轴320为清洁电机310的输出轴,两个清洁电机的正转方向相反设置,两个清洁电机的反转方向也相反设置。此外,本技术中正转方向是指驱动拖擦盘旋转进行清洁工作时的方向;反转与正转方向相反;也可以设定为顺时针为正转,逆时针为反转;只要是抬升拖擦盘和下降拖擦盘的方向为不同方向,下降时的方向为正转,抬升时的方向为反转,均属于基于本发明的构思的简单改进。
49.可以理解的是,拖布220优选通过魔术贴等结构可拆卸设于拖擦盘210的底部。
50.可以理解的是,在满足成型要求的情况下,轴头340和转轴320可以一体成型设置。
51.可以理解的是,轴孔341与转轴320下端之间可以采用椭圆形、扁圆形、矩形、六边形等非圆形轴孔配合结构实现周向定位。
52.可以理解的是,内、外螺纹段221、331之间的轴向间隙δs也可以设置为0.1mm、0.11mm、 0.13mm、0.14mm、0.15mm、0.16mm、0.17mm、0.18mm、0.19mm、0.2mm等其他合理的大小。
53.可以理解的是,内、外螺纹段221、331之间的单侧径向间隙δr也可以设置为0.15mm、 0.16mm、0.17mm、0.18mm、0.19mm、0.21mm、0.22mm、0.23mm、0.24mm、0.25mm、 0.26mm、0.27mm、0.28mm、0.29mm、0.3mm等其他合理的大小。
54.可以理解的是,拖擦盘210的拖擦位置与抬升位置之间的高度差δh也可以设置为2mm、 3mm、5mm、6mm、7mm、8mm、9mm、10mm、11mm、12mm、13mm、14mm、15mm等其他合理的大小。
55.可以理解的是,可以在机体100的底部设置超声波传感器来检测待清洁面的具体情况,清洁机器人可以根据超声波传感器反馈的感应信号判断是否需要升高拖擦件200进行避让。
56.实施例二
57.结合图9、图10,本实施例中,限位件350直接固定连接于转轴320的下端且将轴头340 固定于转轴320下端。具体的,限位件350设有与固定孔321配合的固定柱,固定柱直接固定于固定孔321中,轴头340被固定于转轴320和限位件350之间。
58.本实施例中,上限位部为设于外螺纹段331上方的上挡筋334,拖擦盘210上升至凸台 212与上挡筋334抵触时到达抬升位置。下限位部为设于外螺纹段331下方的下挡筋335,拖擦盘210下降至与下挡筋335抵触时到达拖擦位置。本实施例中,上挡筋334由轴头340的顶端向外延伸形成,下挡筋335由限位件350沿径向向外延伸形成。
59.实施例二的其他结构与实施例一相同,此处不再一一赘述。
60.可以理解的是,限位件350也可以取消固定柱,轴头340和限位件350通过螺钉固定连接于转轴320的下端。
61.可以理解的是,上限位部也可以采用实施例一中的上止动面,上止动面设于轴头340的顶端且与外螺纹段331的顶端对应。
62.可以理解的是,下限位部也可以采用实施例一中的下止动面,此时,下止动面优选设于轴头340的底端且与外螺纹段331的底端对应。
63.除上述优选实施例外,本实用新型还有其他的实施方式,本领域技术人员可以根据本实用新型作出各种改变和变形,只要不脱离本实用新型的精神,均应属于本实用新型权利要求书中所定义的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
