1.本实用新型涉及轨道检测技术领域,具体涉及一种轨道水平检测机器人。
背景技术:
2.随着铁路高速化的推进,对轨道不平顺性检测速度和调整精度要求越来越高。目前,国内外在进行钢轨铺设调整及长钢轨调整(联调联试)时多采用轨检仪的方式进行,测量效率为200米/日,但是轨检仪作业对环境要求非常高,必须在空窗时间进行并配合cpiii进行后方交会测量,并且检测效率低下,使得铁路建设工期显得异常紧张,这对铁路的建设及后期维护都是不利的。
技术实现要素:
3.为解决以上技术问题,本实用新型提供了一种轨道水平检测机器人,通过前梁和后梁两侧的惯性导航仪进行检测,并针对轨道不平整的地方对应每根轨材枕给出调整量,指导轨道调整,使用方便而且无需人工操作。
4.本实用新型采用以下技术方案:
5.一种轨道水平检测机器人,包括检测小车和设置于检测小车上方的机器人本体,所述检测小车包括安装框架和设置于安装框架下方的四个滑轮,安装框架的前梁和后梁之间设有电控箱,所述前梁和后梁两侧设有安装平台,安装平台下方设有滑轮和电性连接电控箱的驱动电机,前梁和/或者后梁的安装平台上方设有惯性导航仪,所述惯性导航仪包括三轴激光陀螺仪和三轴加速度计。
6.作为优选,所述机器人本体内设有电性连接电控箱的频谱仪,用于分析惯性导航仪传递的数据。
7.作为优选,所述机器人本体内设有北斗天线,北斗天线用于接收北斗卫星的信号。
8.作为优选,所述滑轮使用尼龙橡胶材质制成。
9.作为优选,滑轮包括转动于一条轨道上的定滑轮、转动于另一条轨道上的动滑轮,设有动滑轮的安装平台上设有滑动槽和安装槽,滑动槽上设有与滑动槽滑动配合的滑块,滑块通过连接杆穿过安装槽连接动滑轮。
10.作为优选,安装平台上设有两个滑动槽和安装槽,两个滑动槽设置于安装槽两侧。
11.作为优选,滑块包括滑块本体和设置于滑块本体下表面两端的滑动件,滑动件滑动配合于安装槽内。
12.作为优选,所述滑轮位于轨道内的一侧设有对扣件进行状态检测扫描检测组件。
13.作为优选,扫描检测组件包括依次电性连接的扫描检测机构、检测控制单元;所述扫描检测机构为激光扫描仪,用于扫描检测所述轨道上的扣件;所述检测控制单元用于控制所述扫描检测机构工作并将扫描采集的数据传输到电控箱的主控制器;主控制器用于对接收到的扫描采集数据进行处理。
14.与现有技术相比,本实用新型具有以下优点:
15.1、本实用新型通过前梁和后梁两侧的惯性导航仪进行检测,并针对轨道不平整的地方对应每根轨材枕给出调整量,指导轨道调整,使用方便而且无需人工操作。
16.2、本实用新型还可以根据铁轨之间的距离变化,自动调整滑轮之间的距离。
附图说明
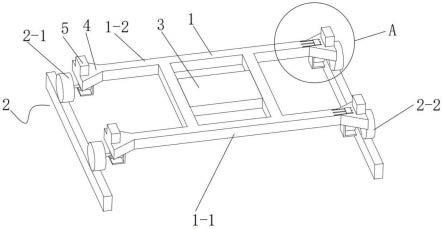
17.图1为检测小车的结构示意图。
18.图2为图1的a部局部放大图。
19.图3为检测小车的另一视角结构示意图。
20.图4为滑块的结构示意图。
21.图5为实用新型的电路模块示意图。
22.图中,安装框架1、前梁1-1、后梁1-2、滑轮2、定滑轮2-1、动滑轮2-2、电控箱3、安装平台4、滑动槽4-1、安装槽4-2、惯性导航仪5、三轴激光陀螺仪5-1、三轴加速度计5-2、滑块6、连接杆6-1、滑块本体6-2、滑动件6-3。
具体实施方式
23.为了便于理解本实用新型技术方案,以下结合附图与具体实施例进行详细说明。
24.实施例1
25.如图1-5所示,一种轨道水平检测机器人,包括检测小车和设置于检测小车上方的机器人本体,所述检测小车包括安装框架1和设置于安装框架1下方的四个滑轮2,安装框架1的前梁1-1和后梁1-2之间设有电控箱3,具体的,前梁1-1和后梁1-2之间设有两个连接杆,两个连接杆之间设有电控箱3。
26.所述前梁1-1和后梁1-2两侧设有安装平台4,安装平台4下方设有滑轮2 和电性连接电控箱3的驱动电机,具体的,一共设有四个安装平台4和四个滑轮2,所述滑轮2抵于轨道上进行滚动,带动检测小车进行移动。
27.前梁1-1和/或者后梁1-2的安装平台4上方设有惯性导航仪5,所述惯性导航仪5包括三轴激光陀螺仪5-1和三轴加速度计5-2,通过三轴激光陀螺仪、三轴加速度计、直线位移传感器和里程传感器等采集到数据后,再采用后处理方式对数据进行处理通,可以通过ppk解算、惯导解算、坐标系统转换、惯导与定位联合解算、轨道偏差计算及综合数据后处理,能够快速准确对三角坑、轨距变化率、超高递变率、左右轨轨向、左右轨高程、水平、轨距、长短波不平顺、扭曲和里程等进行检测,并针对轨道不平整的地方对应每根轨材枕给出调整量,指导轨道调整。可用于长轨精调与复测、既有线复测与调整、轨道变形监测。
28.本实施例中,前梁1-1和后梁1-2的安装平台4上方设有惯性导航仪5。
29.所述机器人本体内设有电性连接电控箱3的频谱仪,用于分析惯性导航仪5 传递的数据。
30.所述机器人本体内设有北斗天线,北斗天线用于接收北斗卫星的信号。惯性导航仪5连接北斗天线,可以实现定位。
31.所述滑轮2使用尼龙橡胶材质制成,在使用时,可以保证滑轮2与铁轨接触,以便测量到准确的数据。
32.滑轮2包括转动于一条轨道上的定滑轮2-1、转动于另一条轨道上的动滑轮 2-2,
设有动滑轮2-2的安装平台4上设有滑动槽4-1和安装槽4-2,滑动槽4-1 上设有与滑动槽4-1滑动配合的滑块6,滑块6通过连接杆6-1穿过安装槽4-2 连接动滑轮2-2。安装平台4上设有两个滑动槽4-1和安装槽4-2,两个滑动槽 4-1设置于安装槽4-2两侧。滑块6包括滑块本体6-2和设置于滑块本体6-2下表面两端的滑动件6-3,滑动件6-3滑动配合于安装槽4-2内。由于铁路在使用时间过长时,会发生轻微的形变,滑轮2之间的距离不可变,可以在实际使用中,铁轨对滑轮2会发生一定的挤压,导致整体结构发生偏转,无法准确的测量数据。故本实用新型为了防止发生以上情况,通过滑块6与滑动槽4-1和安装槽4-2的配合来进行调整滑轮2之间的距离。
33.如图3所示,通过电机安装板的上表面与滑块本体6-2,可以将滑块6进行竖直方向的限位,同时也就将动滑轮2-2进行竖直方向的限位,防止在运动过程中,动滑轮2-2一侧的惯性导航仪5发生竖直方向的晃动产生误差。
34.所述滑轮2位于轨道内的一侧设有对扣件进行状态检测扫描检测组件。扫描检测组件包括依次电性连接的扫描检测机构、检测控制单元;所述扫描检测机构为激光扫描仪,用于扫描检测所述轨道上的扣件;所述检测控制单元用于控制所述扫描检测机构工作并将扫描采集的数据传输到电控箱3的主控制器;主控制器用于对接收到的扫描采集数据进行处理。
35.以上仅是本实用新型的优选实施方式,本实用新型的保护范围以权利要求所限定的范围为准,本领域技术人员在不脱离本实用新型的精神和范围内作出的若干改进和润饰,也应视为本实用新型的保护范围。
技术特征:
1.一种轨道水平检测机器人,包括检测小车和设置于检测小车上方的机器人本体,其特征在于,所述检测小车包括安装框架(1)和设置于安装框架(1)下方的四个滑轮(2),安装框架(1)的前梁(1-1)和后梁(1-2)之间设有电控箱(3),所述前梁(1-1)和后梁(1-2)两侧设有安装平台(4),安装平台(4)下方设有滑轮(2)和电性连接电控箱(3)的驱动电机,前梁(1-1)和/或者后梁(1-2)的安装平台(4)上方设有惯性导航仪(5),所述惯性导航仪(5)包括三轴激光陀螺仪(5-1)和三轴加速度计(5-2);所述滑轮(2)位于轨道内的一侧设有对扣件进行状态检测扫描检测组件;扫描检测组件包括依次电性连接的扫描检测机构、检测控制单元;所述扫描检测机构为激光扫描仪,用于扫描检测所述轨道上的扣件;所述检测控制单元用于控制所述扫描检测机构工作并将扫描采集的数据传输到电控箱(3)的主控制器;主控制器用于对接收到的扫描采集数据进行处理。2.根据权利要求1所述的一种轨道水平检测机器人,其特征在于,所述机器人本体内设有电性连接电控箱(3)的频谱仪,用于分析惯性导航仪(5)传递的数据。3.根据权利要求1所述的一种轨道水平检测机器人,其特征在于,所述机器人本体内设有北斗天线,北斗天线用于接收北斗卫星的信号。4.根据权利要求1所述的一种轨道水平检测机器人,其特征在于,所述滑轮(2)使用尼龙橡胶材质制成。5.根据权利要求1所述的一种轨道水平检测机器人,其特征在于,滑轮(2)包括转动于一条轨道上的定滑轮(2-1)、转动于另一条轨道上的动滑轮(2-2),设有动滑轮(2-2)的安装平台(4)上设有滑动槽(4-1)和安装槽(4-2),滑动槽(4-1)上设有与滑动槽(4-1)滑动配合的滑块(6),滑块(6)通过连接杆(6-1)穿过安装槽(4-2)连接动滑轮(2-2)。6.根据权利要求5所述的一种轨道水平检测机器人,其特征在于,安装平台(4)上设有两个滑动槽(4-1)和安装槽(4-2),两个滑动槽(4-1)设置于安装槽(4-2)两侧。7.根据权利要求5所述的一种轨道水平检测机器人,其特征在于,滑块(6)包括滑块本体(6-2)和设置于滑块本体(6-2)下表面两端的滑动件(6-3),滑动件(6-3)滑动配合于安装槽(4-2)内。
技术总结
本实用新型公开一种轨道水平检测机器人,包括检测小车和设置于检测小车上方的机器人本体,所述检测小车包括安装框架和设置于安装框架下方的四个滑轮,安装框架的前梁和后梁之间设有电控箱,所述前梁和后梁两侧设有安装平台,安装平台下方设有滑轮和电性连接电控箱的驱动电机,前梁和/或者后梁的安装平台上方设有惯性导航仪,所述惯性导航仪包括三轴激光陀螺仪和三轴加速度计。本实用新型通过前梁和后梁两侧的惯性导航仪进行检测,并针对轨道不平整的地方对应每根轨材枕给出调整量,指导轨道调整,使用方便而且无需人工操作。使用方便而且无需人工操作。使用方便而且无需人工操作。
技术研发人员:刘芳 严检华 黄玲辉 燕恒 宋旻颖
受保护的技术使用者:浙江交投轨道交通科技有限公司
技术研发日:2021.10.21
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。