1.本实用新型涉及智能穿戴防护设备技术领域,具体涉及为一种无线监护的安全马甲。
背景技术:
2.现实生活中,有一群特殊的群体比如患有老年痴呆的老年人、小孩以及残障人士,在无人看管的情况下,容易摔倒摔伤,治疗需要花费高昂的费用,又或者面临着走丢、被拐骗、落水等危险,使家人着急又悲痛。
3.为了更好的关爱这些特殊群体,我们设计出一款穿戴设备,可以在他们快要摔倒时做出应对,极大减少摔倒带来的伤害,来减轻家人的担忧,或者在他们走失时及时获取到他们的信息,使佩戴者独自出门更安心,家人更放心!
技术实现要素:
4.本实用新型针对背景技术中特殊人群存在的诸多危险及隐患,提供了一种无线监护的安全马甲,该安全马甲可以检测身体状态,时刻gps定位,显示到亲人的手机上面,而且当摔倒、落水的时候马甲快速充气,可以保护重要器官,减轻伤害。
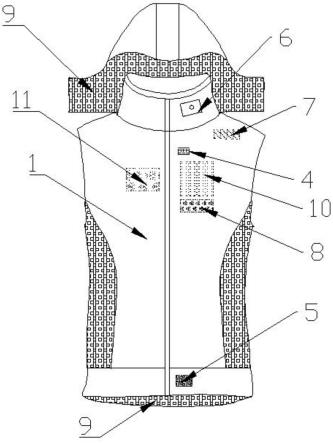
5.为达到上述目的,本实用新型设计出了一种无线监护的安全马甲,包括有带有帽子的马甲本体,所述马甲本体上设置智能控制系统来保障佩戴者的安全,该控制系统包括穿戴监测系统、定位系统、落水监测系统、姿态简析系统、气囊保护系统,其中,穿戴监测系统:利用人体热释感应传感器检测人体红外光谱是否达到阈值,以此判断人体是否穿戴了马甲,当检测到穿戴后开启其他三个系统;姿态解析系统:利用陀螺仪检测身体的倾斜状况,利用超声波测距仪检测身体距离地面的高度,当姿态倾斜达到设定值时再配合当前距离地面的高度,经微控制器处理信息后判断人体是否面临摔倒的危险;落水监测系统:利用湿度传感器检测人体是否落水,将信号传递给微控制器;气囊保护系统:接收到微控制器传输过来的信号后,通过驱动控制器启动气源动力装置快速对气囊保护块进行快速充气,以此解决穿戴者落水或跌倒带来的风险,并将实时状况发给终端设备,给监护人起提醒作用;定位系统:利用gps不断检测当前位置信息发给终端设备,经过终端设备处理后以图形化界面显示。
6.其技术方案为所述马甲本体的衣领上设置有人体热释感应传感器,所述马甲本体的内侧面上分别密封设置有气源动力装置、陀螺仪、gps位置传感器、微控制器、锂电池装置、驱动控制器,所述马甲本体的下摆前、后两侧上分别密封设置有超声波测距仪、湿度传感器,所述超声波测距仪、陀螺仪、湿度传感器、人体热释感应传感器、gps位置传感器、驱动控制器均与所述微控制器相连接,所述气源动力装置、微控制器均由所述锂电池装置提供动力,且气源动力装置通过所述驱动控制器与微控制器相连接,所述气源动力装置上设置有高压储气罐,所述马甲本体上设置有气囊保护块,所述气囊保护块与所述气源动力装置通过软管相连通;
7.所述超声波测距仪用于采集佩戴安全马甲与地面之间的距离,并向微控制器发出采集的距离信息;
8.所述陀螺仪用于采集安全马甲所处的三维空间信息,并向微控制器发出采集的三维空间信息;
9.所述湿度传感器用于采集安全马甲所处环境是否处于水域内的湿度信息,并向微控制器发出采集的湿度信息;
10.所述人体热释感应传感器用于探测人体红外光谱,并向微控制器发出采集的人体热辐射信息;
11.所述gps位置传感器用于采集安全马甲所处的位置信息,并向微控制器发出采集的信息;
12.所述驱动控制器用于接受微控制器发出的指令,启动气源动力装置对气囊保护块进行快速充气;
13.所述微控制器用于接收各传感器采集的信息,根据采集信息分析安全马甲佩戴状态以及佩戴者的身体姿态及周围环境,并向驱动控制器发出相应的执行指令。
14.优选地,所述气源动力装置包括有基座,所述基座上分别设置有多个相连通的接气口和钢瓶接口,所述钢瓶接口上连接所述高压储气罐,所述高压储气罐的接口上设置有带拉环的瓶塞,在所述钢瓶接口对立面上固定连接有复位弹簧,所述复位弹簧的自由端上对应所述拉环设置有钩环,在所述基座的一侧设置有固定座,在所述基座与固定座之间设置有连通钢瓶接口的通道,所述通道内设置有导轮,所述固定座上安装有电动舵机,所述电动舵机的输出轴上设置有绞线轮,所述绞线轮通过钢丝绳与所述复位弹簧的钩环相连接,所述钢丝绳设置在所述导轮上,所述绞线轮在电动舵机驱动下,通过钢丝绳拉扯高压储气罐上的瓶塞,使高压储气罐内压缩的气体通过软管进入到所述气囊保护块中,所述电动舵机通过驱动控制器与微控制器相连接。
15.优选地,多个所述气囊保护块分别设置在马甲本体的帽子中、腰部两侧、下摆处,且其形状分别与人体部位相适配。
16.优选地,所述气囊保护块包括有由两层tpu复合布通过高周波焊接成的气囊体,所述气囊体上连通有注气管,所述注气管通过软管与所述接气口相连通,在两层tpu复合布之间高周波焊接有多个气囊凸块,多个所述气囊凸块将气囊体分割成多个气囊单元,使气囊保护块内气压均匀,形成厚度均匀的气囊垫。
17.优选地,所述气囊凸块包括有环形高周波焊接的多个焊接区,在多个所述多个焊接区的中心形成集气区,相邻两个所述焊接区之间形成连接所述集气区内外的泄气通道,所述集气区的中心设置有泄气孔,所述气囊保护块内的高速气流经泄气通道进入集气区,并通过泄气孔释放,以此对泄气气压控制。
18.优选地,所述微控制器上还连接有无线接收器,且用于以无线通讯方式连接微控制器与终端设备,并实现远程监测信息的传输,所述无线接收器设置在所述马甲本体的内侧面上。
19.与现有技术相比本实用新型具有以下优点:本实用新型通过在安全马甲上设置超声波测距仪、陀螺仪、湿度传感器、人体热释感应传感器、gps位置传感器、微控制器、驱动控制器与微控制器相连接形成智能控制系统,由驱动控制器执行命令控制气源动力装置对气
囊保护块进行快速充气,以此解决穿戴者落水或跌倒带来的风险,除此之外,微控制器通过无线接收器无线通讯方式连接终端设备,并将穿戴者所处的环境信息和位置信息传输给终端设备,实现远程监测。
附图说明
20.图1为本实用新型的主视图;
21.图2为本实用新型的后视图;
22.图3为本实用新型中气源动力装置的结构示意图;
23.图4为本实用新型中气囊保护块的结构示意图;
24.图5为本实用新型中气囊凸块的结构示意图;
25.图6为本实用新型的电路连接框图;
26.图7为本实用新型中stm32rct6单片机的引脚图;
27.图8为本实用新型中hc-sr04超声波测距模块的电路图;
28.图9为本实用新型中atk-mpu6050六轴传感器模块的电路图;
29.图10为本实用新型中雨滴感应模块的电路图;
30.图11为本实用新型中atk-s1216f8-bd-gps模块的电路图;
31.图12为本实用新型中sim800c-gsm通信模块的电路图;
32.图13为本实用新型中yhc-sr501人体热释感应模块的电路图;
33.图14为本实用新型中exb841驱动模块的电路图;
34.安全马甲本体1、气源动力装置2、基座201、接气口202、钢瓶接口203、固定座204、电动舵机205、绞线轮206、钢丝绳207、复位弹簧208、导轮209、超声波测距仪3、陀螺仪4、湿度传感器5、人体热释感应传感器6、无线接收器7、gps位置传感器8、气囊保护块9、气囊体901、气囊凸块902、焊接区 902a、泄气通道902b、集气区902c、泄气孔902d、注气管903、微控制器10、锂电池装置11、高压储气罐12、驱动控制器13。
具体实施方式
35.为了进一步阐述本实用新型的技术方案,下面通过实施例对本实用新型进行进一步说明。
36.参阅图1至6,一种无线监护的安全马甲,包括有带有帽子的马甲本体1,所述马甲本体1的衣领上设置有人体热释感应传感器6,所述马甲本体1的内侧面上分别密封设置有气源动力装置2、陀螺仪4、gps位置传感器8、微控制器 10、锂电池装置11、驱动控制器13,所述马甲本体1的下摆前、后两侧上分别密封设置有超声波测距仪3、湿度传感器5,所述超声波测距仪3、陀螺仪4、湿度传感器5、人体热释感应传感器6、gps位置传感器8、驱动控制器13均与所述微控制器10相连接,所述气源动力装置2、微控制器10均由所述锂电池装置11提供动力,且气源动力装置2通过所述驱动控制器13与微控制器10相连接,所述气源动力装置2包括有基座201,所述基座201上分别设置有多个相连通的接气口202和钢瓶接口203,所述钢瓶接口203上连接所述高压储气罐12,所述高压储气罐12的接口上设置有带拉环的瓶塞,在所述钢瓶接口203对立面上固定连接有复位弹簧208,所述复位弹簧208的自由端上对应所述拉环设置有钩环,在所述基座201的一侧设置有固定座204,在所述基座201与固定座
204 之间设置有连通钢瓶接口203的通道,所述通道内设置有导轮209,所述固定座 204上安装有电动舵机205,所述电动舵机205的输出轴上设置有绞线轮206,所述绞线轮206通过钢丝绳207与所述复位弹簧208的钩环相连接,所述钢丝绳207设置在所述导轮209上,所述绞线轮206在电动舵机205驱动下,通过钢丝绳207拉扯高压储气罐12上的瓶塞,使高压储气罐12内压缩的气体通过软管进入到所述气囊保护块9中,所述电动舵机205通过驱动控制器13与微控制器10相连接,所述马甲本体1上设置有气囊保护块9,所述气囊保护块9与所述气源动力装置2通过软管相连通,多个所述气囊保护块9分别设置在马甲本体1的帽子中、腰部两侧、下摆处,且其形状分别与人体部位相适配,所述气囊保护块9包括有由两层tpu复合布通过高周波焊接成的气囊体901,所述气囊体901上连通有注气管903,所述注气管903通过软管与所述接气口202相连通,在两层tpu复合布之间高周波焊接有多个气囊凸块902,多个所述气囊凸块902将气囊体901分割成多个气囊单元,使气囊保护块9内气压均匀,形成厚度均匀的气囊垫,所述气囊凸块902包括有环形高周波焊接的多个焊接区 902a,在多个所述多个焊接区902a的中心形成集气区902c,相邻两个所述焊接区902a之间形成连接所述集气区902c内外的泄气通道902b,所述集气区902c 的中心设置有泄气孔902d,所述气囊保护块9内的高速气流经泄气通道902b进入集气区902c,并通过泄气孔902d释放,以此对泄气气压控制。
37.进一步,所述微控制器10上还连接有无线接收器7。
38.上述实施例中,所涉及的电子元部件形成的控制电路连接方式如下:
39.所述超声波测距仪3为hc-sr04超声波测距模块,用于采集佩戴安全马甲与地面之间的距离,并向微控制器10发出采集的距离信息;
40.所述陀螺仪4为atk-mpu6050六轴传感器模块,用于采集安全马甲所处的三维空间信息,并向微控制器10发出采集的三维空间信息;
41.所述湿度传感器5为网上采购的雨滴感应模块,用于采集安全马甲所处环境是否处于水域内的湿度信息,并向微控制器10发出采集的湿度信息;
42.所述gps位置传感器8为atk-s1216f8-bd-gps模块,用于采集安全马甲所处的位置信息,并向微控制器10发出采集的信息;
43.所述无线接收器7为sim800c-gsm通信模块,用于以无线通讯方式连接微控制器10与终端设备,并实现远程监测信息的传输,所述无线接收器7设置在所述马甲本体1的内侧面上;
44.所述人体热释感应传感器6为yhc-sr501人体热释感应模块,用于探测人体红外光谱,并向微控制器10发出采集的人体热辐射信息;
45.所述驱动控制器13为exb841驱动模块,用于接受微控制器10发出的指令,启动气源动力装置2对气囊保护块9进行快速充气;
46.所述微控制器10为stm32rct6单片机,用于接收各传感器采集的信息,根据采集信息分析安全马甲佩戴状态以及佩戴者的身体姿态及周围环境,并向驱动控制器13发出相应的执行指令。
47.参阅图7至14,本实施例中,根据各电子元部件对应的电路图与单片机引脚图中引脚连接关系,其连接方式具体为,hc-sr04超声波测距模块电路图中 con4的2端口与stm32rct6单片机引脚图中的pa0引脚相连接, atk-mpu6050六轴传感器模块电路图中的ad
端口、scl端口、sda端口分别与stm32rct6单片机引脚图中的pb3引脚、pb13引脚、pb12引脚相连接,雨滴感应模块电路中的do引脚、ao引脚分别与stm32rct6单片机引脚图中的pa1引脚、pa2引脚相连接,atk-s1216f8-bd-gps模块电路图中的pa6 引脚、pa7引脚分别与stm32rct6单片机引脚图中的pa6引脚、pa7引脚相连接,sim800c-gsm通信模块电路中的pb10引脚、pb11引脚别与stm32rct6 单片机引脚图中的pb10引脚、pb11引脚相连接,yhc-sr501人体热释感应模块电路图中的pa14引脚与stm32rct6单片机引脚图中的pa14引脚相连接, exb841驱动模块电路图中的pa9引脚、pa10引脚分别与stm32rct6单片机引脚图中的pa9引脚、pa10引脚相连接。
48.其工作原理:当atk-mpu6050六轴传感器模块检测到佩戴者的倾斜角度α
(x)
》θ
(阈值)
时,atk-mpu6050六轴传感器模块就向stm32rct6单片机发送信号,与此同时,当hc-sr04超声波测距模块检测到安全马甲本体1与地面距离 l》l
·
sinα,(α优选取30
°
),hc-sr04超声波测距模块就向stm32rct6单片机发送信号,stm32rct6单片机收到atk-mpu6050六轴传感器模块和hc-sr04 超声波测距模块发送的信息后,并向exb841驱动模块发出执行命令,由exb841 驱动模块控制气源动力装置2工作,向气囊保护块9迅速充气,安全马甲本体上的多块气囊保护块9形成重点部位的缓冲保护气垫。
49.当雨滴感应模块检测到佩戴者落水的信息,就向stm32rct6单片机发送信号,stm32rct6单片机收到雨滴感应模块发送的落水信号,并向exb841驱动模块发出执行命令,由exb841驱动模块控制气源动力装置2工作,向气囊保护块9迅速充气,安全马甲本体上的多块气囊保护块9利用其本身在水中浮力,将落水者将人从水中托起。
50.为了防止摔倒时地上尖锐异物刺破气囊保护块9,从而导致防护失效,以上实施例中,气囊保护块9的外表面覆盖有一层凯夫拉芳纶纤维,同时,基于最大化安全和节约成本的双重考虑,凯夫拉芳纶纤维只覆盖气囊保护块9的中间部分,安全马甲本体1优选采用尼龙纤维制作。
51.以上显示和描述了本实用新型的主要特征和优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。