1.本发明涉及人工智能技术领域,尤其涉及一种虚拟环境技能实操的人工智能评分方法。
背景技术:
2.现有的技能实操评分存在以下缺陷:
3.(1)技工的培训或考试很大的比重需要实操,实操在现实场景下对实操对象有环境依赖,比如:育婴师的操作是护理婴儿,现实情况下不可能拿真实婴儿来做实操训练和考评,导致实操评分困难。
4.(2)现有的实操在做考试评分的时候严重依赖的主观判断,存在判断标准因人而异,导致评分的不公平。
5.(3)目前,技工的实操在虚拟现实的应用基本是在教学的单向输出,而且虚拟现实只能实现大动作的肢体跟虚拟环境交互,对于细微的实操动作,很难在虚拟场景中准确体现操作后的结果形态。
技术实现要素:
6.本发明提供一种能够实现动作结果的实时计算并且评分,解决技工实操对环境的依赖问题,建立标准的客观的实操评分标准,使得技工在进行实操时可以实时的感知到自己的每一步操作对被操作物的状态改变,从而提高技能的虚拟环境技能实操的人工智能评分方法。
7.本发明采用的技术方案为:一种虚拟环境技能实操的人工智能评分方法,包括:模型训练阶段,所述模型训练阶段包括以下步骤:
8.完成ai评分模型:
9.n个技工师傅穿戴动作捕捉设备或光学动态捕捉设备,通过ai系统对技能动作的数据进行采集和记录,所有的动作数据汇聚起来形成一个n维数组;通过对n个技工师傅的标准动作的学习,调整每个技能动作的标准参数,得出一个n维标准数组;
10.运用曼哈顿距离算法、切比雪夫距离算法、闵可夫斯基距离算法、标准化欧式距离算法、马氏距离算法、夹角余弦算法、汉明距离算法、杰卡德距离算法、相关系数算法以及信息熵算法分别对输入的动作与标准动作的差值进行计算,同时采用三层ai神经网络算法调整上述十种距离算法的计算权重,取各种算法加权后的均值进行评分,评分算法如下:
[0011][0012]
其中,n为技能实操的考核动作数量,wj为每种距离算法的权重,d
ij
为每个动作在不同的距离算法下跟标准动作的差值;
[0013]
若每一个技工师傅的标准动作的评分大于95分,则输出ai评分模型;若评分小于或等于95分,则通过反向求导的方式调整各种距离算法的权重,重复上述过程,直到所有标
准动作的评分都大于95分;
[0014]
完成vr模型的参数拟合:
[0015]
由技工师傅穿戴vr设备进行动作,通过vr系统采集技工师傅动作数据,记录被操作物在技工师傅的技能动作输入之后的状态变化,技工师傅根据经验判断模型变化是否合理,不合理则调整被操作物的参数,使得每个动作对被操作物的影响符合客观规律,输出vr模型。
[0016]
进一步地,所述评分方法还包括模型应用阶段,
[0017]
技工师傅在应用阶段做实操练习或者考试时,部署动态捕捉设备和vr设备,根据vr提示进行技能操作,动态捕捉设备采集技工师傅的动作信息分别录入vr模型和ai评分模型,由vr模型提供技工师傅操作后的被操作物最新状态展示,指导下一步操作,ai评分模型给出实时分数。
[0018]
进一步地,所述三层ai神经网络算法包括输入层、输出层和隐藏层;其中,输入层和输出层的数量与距离算法数量一致,隐藏层的节点数大于或等于距离算法数量。
[0019]
相较于现有技术,本发明的虚拟环境技能实操的人工智能评分方法通过技工师傅在动态捕捉设备的支持下,将动作数据给到人工智能系统,实现动作结果的实时计算并且评分;解决了技工师傅实操对环境的依赖,建立了标准的客观的实操评分标准,使得技工师傅进行实操时可以实时地感知到自己的每一步操作对被操作物的状态改变,从而学习提高技能。
附图说明
[0020]
附图是用来提供对本发明的进一步理解,并构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但不应构成对本发明的限制。在附图中,
[0021]
图1:本发明技能动作评分流程图;
[0022]
图2:本发明十个算法的权重调整神经网络原理图;
[0023]
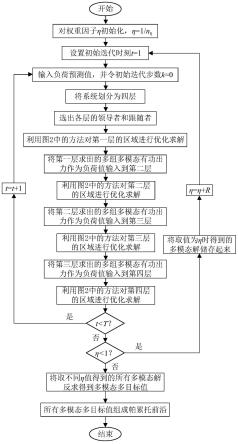
图3:本发明实操动作评分的ai算法训练流程图;
[0024]
图4:本发明虚拟现实模拟参数校正图;
[0025]
图5:本发明应用阶段技工师傅实操评分流程图。
具体实施方式
[0026]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0027]
如图1至图3所示,本发明的虚拟环境技能实操的人工智能评分方法包括模型训练阶段以及模型应用阶段;其中,模型训练阶段需要完成ai(artificial intelligence,人工智能)评分模型和vr(virtual reality,虚拟现实技术)模型的参数拟合。
[0028]
(一)完成ai评分模型
[0029]
首先,n个技工师傅穿戴动作捕捉设备或光学动态捕捉设备,通过ai系统(如:人工智能边缘计算盒子)对技能动作的数据进行采集和记录,所有的动作数据汇聚起来形成一个n维数组,如下:
[0030]
输入in=[x1,x2,x3……
xn];
[0031]
通过对n个技工师傅的标准动作的学习,调整每个技能动作的标准参数,得出一个n维标准数组如下:
[0032]
标准std=[y1,y2,y3……yn
]。
[0033]
然后,运用曼哈顿距离算法、切比雪夫距离算法、闵可夫斯基距离算法、标准化欧式距离算法、马氏距离算法、夹角余弦算法、汉明距离算法、杰卡德距离算法、相关系数算法以及信息熵算法分别对输入的动作与标准动作的差值进行计算,同时采用三层ai神经网络算法调整上述十种距离算法的计算权重,取各种算法加权后的均值进行评分;
[0034]
假设一个技能实操的考核动作为n个,采用上述十种距离算法,每种距离算法的权重为wj,每个动作跟标准动作的差值在不同的距离算法下为d
ij
,则评分算法如下:
[0035][0036]
若每一个技工师傅的标准动作的评分大于95分,则输出ai评分模型;若评分小于或等于95分,通过反向求导的方式调整各种距离算法网络节点的权重,重复上述过程,直到所有标准动作的评分都大于95分。
[0037]
在该步骤中,以标准化欧式距离算法为例,计算差值公式如下:
[0038][0039]
其余的九种距离算法根据各自的标准公式进行计算差值。
[0040]
请参照图3,十种距离算法的计算权重三层ai神经网络算法即:输入层和输出层的数量与距离算法数量一致,假设距离算法数量为n(本发明中n=10),隐藏层的节点数可根据需求调整,要求大于或等于距离算法数量(即:≥n)。
[0041]
以曼哈顿距离算法的权重w1为例,计算过程如
[0042]
x1=d1[0043][0044][0045]
w1=z1[0046]
假设最后系统得出评分为80,预期为100,那么算法误差为-20,针对曼哈顿距离的权重调整如下:
[0047]
假设δw1为需要调整的误差值,w1′
为调整后的值,假定学习速率为η,η《1,在误差为d(d=20)的情况下计算结果如下:
[0048][0049]
w1′
=w1 δw1[0050]
假设δw
12
为需要调整的误差值,w
12
′
为调整后的值,则计算结果如下:
[0051][0052]w12
′
=w
12
δw
12
[0053]
假设δw
11
为需要调整的误差值,w
11
′
为调整后的值,则计算结果如下:
[0054][0055]w11
′
=w
11
δw
11
[0056]
自此完成了一次训练过程,实现了权重的调优,反复重复以上过程即可实现调整权重值,以达到正确评分的目的。
[0057]
其余的九种距离算法的权重计算过程与上述的计算过程相同,在此不再赘述。
[0058]
(二)完成vr模型的参数拟合:
[0059]
如图4所示,由技工师傅穿戴vr设备进行动作,通过vr系统采集技工师傅动作数据,记录被操作物(即:训练vr模型)在技工师傅的技能动作输入之后的状态变化,技工师傅根据经验判断被操作物变化是否合理,不合理则调整被操作物的参数,使得每个动作对被操作物的影响符合客观规律,输出vr模型。
[0060]
(三)模型应用阶段
[0061]
如图5所示,最后进入模型应用阶段,参数不再调整,如果出现评分不合理,则重新返回模型训练阶段;技工师傅在应用阶段做实操练习或者考试时,部署动态捕捉设备和vr设备,根据vr提示进行技能操作,动态捕捉设备采集技工师傅的动作信息分别录入vr模型和ai评分模型,vr模型提供技工师傅操作后的被操作物最新状态展示,从而指导下一步操作,ai评分模型给出实时分数。
[0062]
综上,本发明的虚拟环境技能实操的人工智能评分方法运用动作捕捉技术采集技工师傅标准的技能动作,通过ai完成标准动作的模型训练,同时对vr模型进行标准的参数较准,使得技工师傅在虚拟现实里通过动作捕捉设备精准的采集到技能动作,技能动作在ai模型里实时打分的同时在vr模型里实时的更新操作后的模型状态,从而实现了技工师傅能够在虚拟现实的环境里完成实操技能的培训和考试;使得技工师傅在不依赖技工师傅师傅和操作环境的情况下依然可以自我学习实操技能。此外,通过使用ai的评分体系,可以使得依赖技工师傅师傅主观评分的实操环节实现了客观化、标准化。
[0063]
只要不违背本发明创造的思想,对本发明的各种不同实施例进行任意组合,均应当视为本发明公开的内容;在本发明的技术构思范围内,对技术方案进行多种简单的变型及不同实施例进行的不违背本发明创造的思想的任意组合,均应在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。