一种基于面向星间差分的gps/bds/ins紧组合导航的多故障检测与剔除方法
技术领域
1.本发明属于卫星定位导航技术领域,特别涉及一种基于面向星间差分的gps/bds/ins紧组合导航的多故障检测与剔除方法。
背景技术:
2.卫星/惯性组合导航是当前室外导航的主要定位手段,其中紧组合导航技术是一种在卫星观测量端的组合导航技术,与松组合相比,其具有更高的定位精度并能够在卫星数量少于4颗时工作。随着各国卫星导航系统的建立与完善,在轨导航卫星的数量不断增加,更多的观测量能够应用于紧组合导航中,这将大大提升组合导航的定位精度,但是也增大了卫星多观测量同时发生故障的概率。故障往往是因为卫星受多路径效应、人为干扰、欺骗、卫星导航的软硬件随机故障等影响产生,尤其是在城市环境下,高楼耸立,遮挡、多路径效应等尤为明显,这些故障通常无法预知与建模。因此,实时的多观测量故障检测与剔除对于惯性/卫星紧组合导航系统有重要意义,可以保证导航定位的准确性与可靠性。
3.目前应用于组合导航系统中的卫星信息故障检测算法包括接收机自主完好性监测(raim),接收机自主完好性外推(aime),这些方法对单故障敏感度很高但无法有效进行多故障检测。多假设解分离(mhss)通过对所有的卫星进行组合运算将不同的故障分离到不同的子集中,根据子集解与全集解的差值构建检验统计量,是一种有效的多故障检测方法,被应用于高级接收机完好性监测(araim),但是其在需要监测的观测量或故障数量较多时,易产生计算量爆炸的情况。同时,上述方法在面对星间差分卫星/惯性紧组合导航观测量故障时,无法有效分辨参考观测量故障与非参考观测量故障。
技术实现要素:
4.为了解决现有技术中的问题,本发明提供一种基于面向星间差分的gps/bds/ins紧组合导航的多故障检测与剔除方法,该方法能够处理包括参考星在内的多卫星观测量故障,最大化利用正确的卫星观测量。
5.为实现上述目的,本发明采用的技术方案为:
6.一种基于面向星间差分的gps/bds/ins紧组合导航的多故障检测与剔除方法,包括以下步骤:
7.步骤1,初始化求得gps与bds的系统间偏差;
8.步骤2,建立基于星际差分的卫星/惯性紧组合模型;
9.所述步骤2中基于星际差分的卫星/惯性紧组合模型中量测方程的建立:
10.步骤21,对当前历元所得的卫星伪距观测值做卫星钟差、电离层误差、对流层误差的修正,并在bds系统的伪距观测值中减去系统间偏差,最终所得量为之后用于解算的伪距观测值;
11.步骤22,选择卫星高度角最高的那颗卫星作为星际差分中的参考卫星l,分别计算
第i个卫星的卫星伪距星际差分值与惯导预测伪距星际差分值
[0012][0013][0014]
其中:和分为第i个卫星和参考卫星l的伪距值,和分别为惯导解算的第i个卫星和参考卫星l的预测伪距,其值为对应卫星与接收机之间的几何距离,则假设卫星总数为n,量测量zk和量测矩阵h
k/k-1
分别为:
[0015][0016][0017]
其中:分别为历元k时的第1个,第i个,第n-1个卫星的惯导预测伪距星际差分值,分别为历元k时的第1个,第i个,第n-1个卫星的伪距星际差分值;分别对应着第1个、第i个,第n-1个卫星,其定义为各个卫星与参考卫星的单位观测矢量差值,即参考卫星的单位观测矢量差值,即和分别为第i个卫星和参考卫星l的单位观测矢量,为从导航系n至地球系e的旋转矩阵;
[0018]
进一步的,步骤3,基于新息量对包括参考星在内的伪距观测量进行第一次故障检测与剔除,包括以下步骤:
[0019]
步骤31,计算新息量γk,新息量γk定义为量测量与预测量测量的差值,即:
[0020][0021]
其中:x
k/k-1
=f
k/k-1
x
k-1
为第k个历元时刻滤波器状态一步预测值,f
k/k-1
为状态转移矩阵,x
k-1
为上一历元状态量,由于在闭环滤波中,之前的误差都会被不断估计和修正,所以x
k-1
为0,则x
k/k-1
=0,即在闭环紧组合中新息量γk等于量测量zk;
[0022]
步骤32,计算基于新息的第一步故障检测量f
γ,k
,f
γ,k
由n-1个元素组成,即1个元素组成,即t为转置符号,和分别为第1个,第i个和第n-1个卫星对应的故障检测量,定义为:
[0023]
[0024]
其中:为第i个卫星的新息量,等于γk中的第i个元素,为第i个卫星的新息量的方差值,等于新息量协方差阵∑
γ,k
中位于第i行第i列的对角线元素,∑
γ,k
计算方法为:
[0025][0026]
其中:p
k/k-1
为状态量一步预测协方差阵,rk是量测噪声的协方差阵;
[0027]
步骤33,分析f
γ,k
的分布规律,筛选记录f
γ,k
中符合标准正态分布的值,记录在集合a0中,即并统计符合标准正态分布的元素值的个数,记为m0,即m0=length(a0);
[0028]
步骤34,筛选记录f
γ,k
中符合非0均值正态分布的值,记录在集合a1中,即μ为正态分布的均值,μ≠0,统计符合非0均值正态分布的元素值的个数,记为m1,即m1=length(a1);由于μ值未知,所以只有当存在不低于三个元素皆满足非0均值分布时,才能够进行判断与记录,即m1≥3或m1=0;
[0029]
步骤35,当m0≥2时,即存在两个以上的新息检测量满足标准正态分布,此时认为参考星伪距观测量无故障,转步骤36;当m0《2,认为参考星伪距观测量,转步骤37;
[0030]
步骤36,所有不满足标准正态分布的检验统计量所对应的非参考星伪距观测量被检测为有故障,并被排除,转步骤310;
[0031]
步骤37,参考星伪距观测量故障,需要更换参考星:当m1≥3时,有不低于3颗的非参考星伪距观测值正确,转步骤38;当m1《3时,无法进行无故障非参考星伪距观测值的判断,转步骤39;
[0032]
步骤38,剔除原有的参考星,在集合a1中任意选择一个卫星作为参考星,a1中其余卫星作为非参考星,计算量测量zk、量测矩阵h
k/k-1
和量测噪声的协方差阵rk,并转步骤310;
[0033]
步骤39,剔除原有参考星,在剩余卫星中选择任意一个作为参考星,记录更换参考星的次数k,当k=n-2,转步骤311,否则转步骤22;
[0034]
步骤310,进行扩展卡尔曼滤波,输出定位结果,基于新息的第一步故障检测方案结束;
[0035]
步骤311,以惯导递推结果作为定位结果输出,基于新息的故障检测方案结束。
[0036]
所述步骤1中,初始化阶段在系统正式开始工作前获得gps与bds的先验系统间偏差,历元k的系统间偏差求解方法为:
[0037]
δt
τ,k
=δt
ug,k-δt
ub,k
ꢀꢀ
(1)
[0038]
其中:δt
ug,k
和δt
ub,k
分别是历元k时的由伪距单点定位解算所得的gps接收机钟差和bds接收机钟差,δt
τ,k
为第k个历元的系统间偏差,对初始化阶段所得的系统间偏差求均值,即得先验系统间偏差δt
τ
:
[0039][0040]
其中:j代表历元1至k中的某一历元,δt
τ,j
为第j个历元时的系统间偏差。
[0041]
进一步的,步骤4,在滤波后,基于残差值进行第二次故障检测与剔除,并输出最终定位结果;
[0042]
步骤41,计算量测量残差sk:
[0043]
sk=z
k-hkx
k/k
ꢀꢀ
(10)
[0044]
其中:x
k/k
为状态量后验估计,zk和hk为经历过第一次故障检测后的量测量与量测方程,
[0045]
步骤42,构造基于残差的检验统计量λk:
[0046][0047]
其中:是sk的转置矩阵,为sk中第n行元素,为残差协方差阵中的第n行第n列元素,κ为第一次故障检测与剔除后量测量与量矩阵的维数,若无故障发生,e()为数学期望函数,χ2(κ)就是自由度为k的中心卡方分布,λk服从自由度为κ的中心卡方分布,即λk~χ2(κ);若有故障发生,λk服从非中心卡方分布,即服从非中心卡方分布,即是非中心化参数;
[0048]
步骤43,进行基于残差的故障检测:
[0049][0050]
其中:fd为实时计算的检测门限,根据预设的误警率pf=1/1000来计算:
[0051][0052]
其中:p(λk《fd)表示λk《fd的概率,x是任意变量;
[0053]
当基于残差的第二步故障检测方案无法通过时,认为基于新息的第一步故障检测方案是无效的,此时,定位将不再依赖卫星,而是直接输出惯导递推结果;若基于残差的第二步检验统计量通过,则基于新息的第一步故障检测统计量方案有效,输出组合导航滤波结果。
[0054]
与现有技术相比,本发明具有以下有益效果:
[0055]
本发明通过星间差分,gps/bds/ins紧组合不再需要估计接收机钟差,减少了需要估计的状态量,避免了接收机钟差建模不准确的问题,提高了定位精度;
[0056]
本发明中两步故障检测法分别在滤波前后进行,最大程度上降低漏检可能性,保证定位的可靠性;
[0057]
本发明中第一步故障检测方法根据检测量的分布提处一种新的故障检测策略,能够检测包括参考星观测量在内的多观测量故障,最大化利用正确的卫星观测量,从而保证
定位的精度与稳定。
附图说明
[0058]
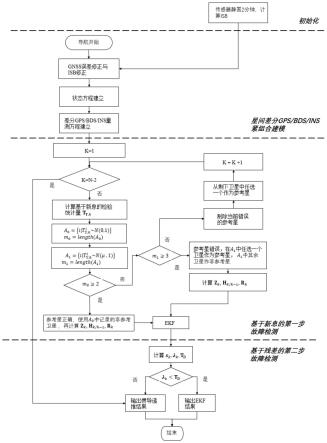
图1是本发明的算法结构图;
[0059]
图2是阶跃误差情况下的本发明故障检测与剔除方案与未加故障检测方案的定位误差对比图;
[0060]
图3是斜坡误差情况下的本发明故障检测与剔除方案与未加故障检测方案的定位误差对比图。
具体实施方式
[0061]
下面结合实施例对本发明作更进一步的说明。
[0062]
实施例1
[0063]
如图1所示,一种基于面向星间差分的gps/bds/ins紧组合导航的多故障检测与剔除方法,包括以下步骤:
[0064]
步骤1,初始化求得gps与bds的系统间偏差;
[0065]
步骤2,建立基于星际差分的卫星/惯性紧组合模型;
[0066]
所述步骤2中基于星际差分的卫星/惯性紧组合模型中量测方程的建立:
[0067]
步骤21,对当前历元所得的卫星伪距观测值做卫星钟差、电离层误差、对流层误差的修正,并在bds系统的伪距观测值中减去系统间偏差,最终所得量为之后用于解算的伪距观测值;
[0068]
步骤22,选择卫星高度角最高的那颗卫星作为星际差分中的参考卫星l,分别计算第i个卫星的卫星伪距星际差分值与惯导预测伪距星际差分值
[0069][0070][0071]
其中:和分为第i个卫星和参考卫星l的伪距值,和分别为惯导解算的第i个卫星和参考卫星l的预测伪距,其值为对应卫星与接收机之间的几何距离,则假设卫星总数为n,量测量zk和量测矩阵h
k/k-1
分别为:
[0072][0073][0074]
其中:分别为历元k时的第1个,第i个,第n-1个卫星的惯导预
测伪距星际差分值,分别为历元k时的第1个,第i个,第n-1个卫星的伪距星际差分值;分别对应着第1个、第i个,第n-1个卫星,其定义为各个卫星与参考卫星的单位观测矢量差值,即参考卫星的单位观测矢量差值,即和分别为第i个卫星和参考卫星l的单位观测矢量,为从导航系n至地球系e的旋转矩阵;
[0075]
步骤3,基于新息量对包括参考星在内的伪距观测量进行第一次故障检测与剔除,包括以下步骤:
[0076]
步骤31,计算新息量γk,新息量γk定义为量测量与预测量测量的差值,即:
[0077][0078]
其中:x
k/k-1
=f
k/k-1
x
k-1
为第k个历元时刻滤波器状态一步预测值,f
k/k-1
为状态转移矩阵,x
k-1
为上一历元状态量,由于在闭环滤波中,之前的误差都会被不断估计和修正,所以x
k-1
为0,则x
k/k-1
=0,即在闭环紧组合中新息量γk等于量测量zk;
[0079]
步骤32,计算基于新息的第一步故障检测量f
γ,k
,f
γ,k
由n-1个元素组成,即1个元素组成,即t为转置符号,和分别为第1个,第i个和第n-1个卫星对应的故障检测量,定义为:
[0080][0081]
其中:为第i个卫星的新息量,等于γk中的第i个元素,为第i个卫星的新息量的方差值,等于新息量协方差阵∑
γ,k
中位于第i行第i列的对角线元素,∑
γ,k
计算方法为:
[0082][0083]
其中:p
k/k-1
为状态量一步预测协方差阵,rk是量测噪声的协方差阵;
[0084]
步骤33,分析f
γ,k
的分布规律,筛选记录f
γ,k
中符合标准正态分布的值,记录在集合a0中,即并统计符合标准正态分布的元素值的个数,记为m0,即m0=length(a0);
[0085]
步骤34,筛选记录f
γ,k
中符合非0均值正态分布的值,记录在集合a1中,即μ为正态分布的均值,μ≠0,统计符合非0均值正态分布的元素值的个数,记为m1,即m1=length(a1);由于μ值未知,所以只有当存在不低于三个元素皆满足非0均值分布时,才能够进行判断与记录,即m1≥3或m1=0;
[0086]
步骤35,当m0≥2时,即存在两个以上的新息检测量满足标准正态分布,此时认为参考星伪距观测量无故障,转步骤36;当m0《2,认为参考星伪距观测量,转步骤37;
[0087]
步骤36,所有不满足标准正态分布的检验统计量所对应的非参考星伪距观测量被检测为有故障,并被排除,转步骤310;
[0088]
步骤37,参考星伪距观测量故障,需要更换参考星:当m1≥3时,有不低于3颗的非
参考星伪距观测值正确,转步骤38;当m1《3时,无法进行无故障非参考星伪距观测值的判断,转步骤39;
[0089]
步骤38,剔除原有的参考星,在集合a1中任意选择一个卫星作为参考星,a1中其余卫星作为非参考星,计算量测量zk、量测矩阵h
k/k-1
和量测噪声的协方差阵rk,并转步骤310;
[0090]
步骤39,剔除原有参考星,在剩余卫星中选择任意一个作为参考星,记录更换参考星的次数k,当k=n-2,转步骤311,否则转步骤22;
[0091]
步骤310,进行扩展卡尔曼滤波,输出定位结果,基于新息的第一步故障检测方案结束;
[0092]
步骤311,以惯导递推结果作为定位结果输出,基于新息的故障检测方案结束。
[0093]
所述步骤1中,初始化阶段在系统正式开始工作前获得gps与bds的先验系统间偏差,历元k的系统间偏差求解方法为:
[0094]
δ
tτ,k
=δt
ug,k-δt
ub,k
ꢀꢀ
(1)
[0095]
其中:δt
ug,k
和δt
ub,k
分别是历元k时的由伪距单点定位解算所得的gps接收机钟差和bds接收机钟差,δt
τ,k
为第k个历元的系统间偏差,对初始化阶段所得的系统间偏差求均值,即得先验系统间偏差δt
τ
:
[0096][0097]
其中:j代表历元1至k中的某一历元,δt
τ,j
为第j个历元时的系统间偏差。
[0098]
如图2所示,步骤4,在滤波后,基于残差值进行第二次故障检测与剔除,并输出最终定位结果;
[0099]
步骤41,计算量测量残差sk:
[0100]
sk=z
k-hkx
k/k
ꢀꢀ
(10)
[0101]
其中:x
k/k
为状态量后验估计,zk和hk为经历过第一次故障检测后的量测量与量测方程,
[0102]
步骤42,构造基于残差的检验统计量λk:
[0103][0104]
其中:是sk的转置矩阵,为sk中第n行元素,为残差协方差阵中的第n行第n列元素,κ为第一次故障检测与剔除后量测量与量矩阵的维数,若无故障发生,e()为数学期望函数,χ2(κ)就是自由度为k的中心卡方分布,λk服从自由度为κ的中心卡方分
布,即λk~χ2(κ);若有故障发生,λk服从非中心卡方分布,即服从非中心卡方分布,即是非中心化参数;
[0105]
步骤43,进行基于残差的故障检测:
[0106][0107]
其中:fd为实时计算的检测门限,根据预设的误警率pf=1/1000来计算:
[0108][0109]
其中:p(λk《fd)表示λk《fd的概率,x是任意变量;
[0110]
当基于残差的第二步故障检测方案无法通过时,认为基于新息的第一步故障检测方案是无效的,此时,定位将不再依赖卫星,而是直接输出惯导递推结果;若基于残差的第二步检验统计量通过,则基于新息的第一步故障检测统计量方案有效,输出组合导航滤波结果。
[0111]
针对故障检测部分:通过新息和残差分别构建检验统计量,首先根据基于新息的检验统计量的分布规律识别正确的非参考星观测量,并检测参考星是否有故障,若有故障则在正确的非参考星中挑选新的参考星进行替代并重新开始;若无参考星故障则剔除故障的非参考星观测量并进行滤波。在滤波完成后进行第二步故障检测,根据基于残差的检验统计量检测所使用卫星观测量,若通过,则证明第一步基于新息检测的方案有效,输出滤波定位结果;若不通过,则说明第一步基于新息检测的方案无效,直接输出惯导递推结果。
[0112]
实施例2
[0113]
仿真说明
[0114]
故障仿真考虑如下因素:故障类型(阶跃故障、斜坡故障)、发生故障的卫星观测量个数,参考星是否有故障,故障的大小,故障持续时间。本实施例2中分别设置了不同类型的阶跃故障和斜坡故障仿真,具体仿真情况分别如表1和表2所示。
[0115]
阶跃故障
[0116]
阶跃故障类型详细情况如表1所示,各故障情况主要在于故障大小、故障数量、是否有参考星观测量故障。其中g23卫星是本次实验的参考星,即情况2、4含有参考星故障。
[0117]
表1.阶跃故障类型仿真情况
[0118][0119]
参考图2,不同情况的阶跃故障被添加在观测伪距上,本发明所得的定位误差与未加故障检测方案的定位误差如图2所示,本发明所述方法能够有效识别并剔除包括参考星在内的多卫星观测量阶跃故障,可识别并剔除低至5m的阶跃故障,将定位误差维持在正常
标准,保证定位的完好性与可靠性。
[0120]
斜坡故障
[0121]
斜坡故障类型详细情况如表2所示,各故障情况主要在于故障斜率、故障持续时间、故障数量、是否有参考星观测量故障。其中g23卫星是本次实验的参考星,即情况2、4含有参考星故障。
[0122]
表2.斜坡故障类型仿真情况
[0123][0124]
参考图3,不同形式的阶跃故障被添加在观测伪距上,本发明所得的定位误差与未加故障检测方案的定位误差如附图3所示。未使用故障检测和剔除时,斜坡故障带来的定位误差是巨大的且在故障消失后无法及时恢复原有的定位精度。本发明所述方法能够有效识别并剔除包括参考星在内的多卫星观测量斜坡故障,定位精度明显提高,有效保证定位的完好性与可靠性。
[0125]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。