技术特征:
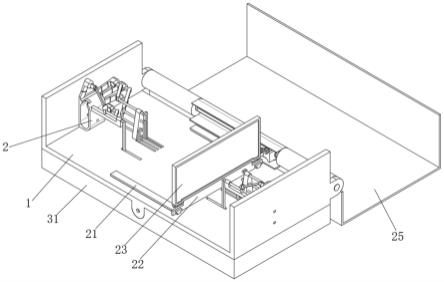
1.一种镜像治疗机械手套,包括u型座(1),以及多个左右对称设置的左推杆(6)和右推杆(7),其特征在于,所述u型座(1)的左右两侧内壁分别固接有左手掌套(2)和右手掌套(3),所述左手掌套(2)和所述右手掌套(3)左右对称设置,所述左手掌套(2)和所述右手掌套(3)的外侧均通过硅胶皮垫(4)活动设置有五个手指对应的指套(5),所述u型座(1)的底部对称开设有多个分别与左推杆(6)、右推杆(7)一一对应的滑槽(8),多个所述滑槽(8)呈左右对称结构设置,所述左推杆(6)和所述右推杆(7)均滑动设置于相应滑槽(8)中,多个所述左推杆(6)和所述右推杆(7)分别与左右的五个指套(5)一一对应,除大拇指之外的其他四指对应的所述指套(5)均通过传动组件a驱动所述左推杆(6)和所述右推杆(7)沿着所述滑槽(8)滑动,大拇指对应的所述指套(5)通过所述传动组件c驱动所述左推杆(6)和所述右推杆(7)沿着所述滑槽(8)滑动,所述左推杆(6)和所述右推杆(7)之间通过传动组件b传动设置。2.根据权利要求1所述的一种镜像治疗机械手套,其特征在于,所述传动组件a包括连杆a(13),除大拇指以外的其余四指对应的指套(5)外侧均设置有连杆a(13),所述连杆a(13)的另一端均转动设置有连接块a(14),所述连接块a(14)的外侧均固定设置有滑杆a(15),所述滑杆a(15)均滑动设置于限位座(16)的内侧,所述滑杆a(15)的另一端均与相应的左推杆(6)或者右推杆(7)转动设置。3.根据权利要求2所述的一种镜像治疗机械手套,其特征在于,所述传动组件c包括连杆b(17)、连接块b(1)和球形万向节(20),大拇指所对应的指套(5)外侧转动设置有连杆b(17),所述连杆b(17)的另一端转动设置有连接块b(1),所述连接块b(1)的外侧固定设置有滑杆c,位于所述连接块b(1)外侧的滑杆c滑动设置于限位台(19)的内侧,所述限位台(19)固定设置于左手掌套(2)和右手掌套(3)的外侧,所述连杆b(17)的两端均通过球形万向节(20)分别与指套(5)和连接块b(1)转动设置。4.根据权利要求3所述的一种镜像治疗机械手套,其特征在于,所述传动组件b包括上齿条(9)、下齿条(10)和齿轮(11),所述上齿条(9)固定设置于所述左推杆(6)的底部,所述下齿条(10)固定设置于所述右推杆(7)的底部,所述上齿条(9)与所述左推杆(6)一一对应设置,所述下齿条(10)与所述右推杆(7)一一对应设置,相应的上齿条(9)和下齿条(10)之间均啮合设置有齿轮(11),所述齿轮(11)均转动套接于连接轴(12)的侧壁,连接轴(12)固定设置于u型座(1)的底部。5.根据权利要求4所述的一种镜像治疗机械手套,其特征在于,所述u型座(1)内侧的顶端对称固定设置有滑轨(21),所述滑轨(21)外侧滑动设置有滑座(22),所述滑座(22)顶部转动设置有双面镜框(23)。6.根据权利要求5所述的一种镜像治疗机械手套,其特征在于,所述u型座(1)的一侧通过转轴(24)转动设置有上盖(25),所述上盖(25)位于u型座(1)的外侧,所述上盖(25)在转动时通过联动组件驱动双面镜框(23)转动。7.根据权利要求6所述的一种镜像治疗机械手套,其特征在于,所述联动组件包括锥齿轮a(26)和直角型连接件(2),所述锥齿轮a(26)固定设置于双面镜框(23)的轴端,锥齿轮a(26)外侧啮合设置有锥齿轮b(27),直角型连接件(2)转动设置于锥齿轮b(27)的一侧,直角型连接件(2)的另一侧与锥齿轮a(26)转动设置,转轴(24)的外侧开设有滑台(29),锥齿轮b(27)滑动设置于滑台(29)的外侧,u型座(1)一侧位于联动组件的外侧固定设置有护罩
(30)。8.根据权利要求7所述的一种镜像治疗机械手套,其特征在于,u型座(1)底部固定设置有底座(31),底座(31)位于传动组件b的外侧。9.根据权利要求8所述的一种镜像治疗机械手套,其特征在于,指套(5)、左推杆(6)、右推杆(7)和传动组件a均为透明塑料材质。10.根据权利要求9所述的一种镜像治疗机械手套的使用方法,其特征在于,包括以下步骤:打开u型座(1)顶部的上盖(25),此时,上盖(25)在转动时带动转轴(24)转动,转轴(24)带动锥齿轮b(27)转动,使锥齿轮b(27)驱动锥齿轮a(26)带动双面镜框(23)转动,方便对双面镜框(23)展开;根据患肢的左右将滑座(22)通过滑轨(21)滑动到靠近患肢的一侧,使患肢根据双面镜框(23)观察健肢的活动情况,以实现视觉刺激,并且在左右移动双面镜框(23)时,双面镜框(23)带动锥齿轮a(26)移动,锥齿轮a(26)通过直角型连接件(2)带动锥齿轮b(27)沿着转轴(24)外侧的滑台(29)滑动,以保证双面镜框(23)可根据患肢位置移动的正常进行;将双手分别穿戴在左手掌套(2)和右手掌套(3)的内部,并且将五指与指套(5)对应穿戴,当健肢体活动除大拇指以外的其余手指时,其余四个指套(5)会同时推动连杆a(13)转动,并且随着指套(5)向掌心处弯曲,连杆a(13)通过连接块a(14)边转动边推动滑杆a(15)在限位座(16)的内侧滑动,使滑杆a(15)推动左推杆(6)或者右推杆(7)在滑槽(8)的内侧滑动,同时,大拇指活动时,通过连杆b(17)推动一端通过连接块b(1)连接的滑杆c滑动,使滑杆c分别推动左推杆(6)或者右推杆(7)滑动,当左推杆(6)在健肢活动的带动下沿着滑槽(8)滑动时会带动上齿条(9)移动,使上齿条(9)通过转动设置的齿轮(11)驱动下齿条(10)反向移动,使下齿条(10)带动右推杆(7)与左推杆(6)反向滑动,使右推杆(7)通过另一侧的传动组件a带动患肢做同样的运动,以达到左右运动镜像的效果。
技术总结
本发明公开了一种镜像治疗机械手套及其使用方法,该机械手套包括U型座,以及多个左右对称设置的左推杆和右推杆,U型座的左右两侧内壁分别固接有左手掌套和右手掌套,左手掌套和右手掌套的外侧均通过硅胶皮垫活动设置有五个手指对应的指套,U型座的底部对称开设有多个分别与左推杆、右推杆一一对应的滑槽,滑槽呈左右对称结构设置,左推杆和右推杆均滑动设置于相应滑槽中,多个左推杆和右推杆分别与左右的五个指套一一对应,除大拇指之外的其他四指对应的指套均通过传动组件A驱动左推杆和右推杆沿着滑槽滑动,大拇指对应的指套通过传动组件C驱动左推杆和右推杆沿着滑槽滑动,左推杆和右推杆之间通过传动组件B传动设置。推杆和右推杆之间通过传动组件B传动设置。推杆和右推杆之间通过传动组件B传动设置。
技术研发人员:丁圣路 龙世中
受保护的技术使用者:丁圣路
技术研发日:2022.10.12
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。