1.本发明涉及一种船舶轴系推力和扭矩监测系统,特别涉及一种基于船用推力扭矩综合监测装置及方法,属于船舶测试领域。
背景技术:
2.船舶轴系推力和扭矩是船舶动力的关键参数,测量数据对主机安全使用、螺旋桨效率监测及设计优化、航行状态管理具有重要价值。实船轴系推力和扭矩形变量差距较大,且相互耦合,同时测量难度较大。
3.中国专利公开号cn104634494a公开的一种吊舱试验的推力扭矩测量装置,通过在吊舱内电机和螺旋桨之间安装推力扭矩传感器的方式,获得螺旋管将产生的推力和扭矩数据。这种方式采用了市场上成熟的推力扭矩传感器,在装置设计时就要加装,而当前实船轴系中基本都没有加装这种介入式的传感器,再次加装又将改变轴系原本设计的技术状态。因此,这种介入式的推力扭矩综合监测装置不适用于现有船的监测。
4.目前,非介入式的推力扭矩综合监测方式主要通过粘贴应变片的方式获取轴系扭转和压缩形变,测量准确性受到应变片粘贴效果的影响,准确性较低,误差一般会达到5%甚至更差,且重复性较差,测量结果难以发挥预期作用。更重要的是,应变片是一次性测量器件,一旦粘贴使用,无法拆卸,以直接粘贴应变片的方式测量推力和扭矩的监测装置都无法进行从测量元件、信号处理装置和显示装置的全系统校准,测量结果的准确性无法用量值传递体系来保证,因此,在工程中只能用以临时测量和定性分析,难以发挥关键作用。
5.另一种应变式的非介入方法是在轴上间隔一定距离布置两个卡环,卡环之间安装粘贴有应变片的弹性体,通过卡环将轴系的推力形变和扭转形变转换为弹性体的应变,进而获得轴系的推力和扭矩数据。这种监测装置拆装方便,可以用实验室的高精度压力机和扭矩机进行校准,可以保证测量准确性。但这种方式存在两个问题,首先推力和扭矩在轴上本身就存在耦合关系,经过卡环传递到弹性体后,这种耦合关系更加复杂,难以解除,导致轴系推力和扭矩同时存在时,测量数据难以反映真实状态,实际使用时的数据准确性较差;其次,应变片本身的量程较大,可达10000με以上,而船舶轴系的额定扭矩应变一般为1000με,而额定推力应变大约仅有20με左右,部分船舶甚至低于10με,已经处于应变片的测量下限附近,此时,应变片测量结果的线性度和重复性较低,在实际应用时的测量数据的准确性不能满足监测需求。
技术实现要素:
6.本发明是要提供一种船用推力扭矩综合监测装置及方法,通过该监测装置和方法可以将轴系形变传递到测量臂上的二维光学传感器上,通过传感器信号的解耦获得准确的推力和扭矩数据,解决传统应变式监测装置准确性差和不可溯源的难题,为船舶科学管理和设计优化提供有效支撑。
7.为实现以上目的,本发明通过以下技术方案予以实现:
8.一种船用推力扭矩综合监测装置,包括安装在旋转轴上的供电模块、转子采集模块、卡环、二维光学测量臂、定子支架、轴旁供电模块、采集仪和上位机,所述二维光学测量臂由两个可以产生相对移动的测量臂组成,一个测量臂内装有激光发射器,另外一个测量臂内装有四象限探测器;两个测量臂均通过卡环装在船用轴承上,激光发射器发出的光源直接照射在四象限探测器的中心位置,光轴方向和轴承的轴向正交,通过将非面内的正交分量转化为四象限探测器的面内正交分量;当推力和扭矩产生式,光斑在四象限探测器上产生相对位移,能够同时对推力和扭矩进校测量。
9.进一步,所述四象限探测器由对称分布在直角坐标系四个象限且性能相近的光电转换器组成扭矩推力光学传感器。
10.进一步,所述扭矩推力光学传感器中的光电传感器芯片采用四极光电二极管阵列,带有一个7针连接器,具有电流至电压放大器,所提供的和信号是所有四个象限二极管信号之和,所提供的差信号是阵列中的成对的光电二极管元件所感测的光强度差。
11.进一步,所述船用推力扭矩综合监测装置中的信号处理电路,包括转子部分和定子部分,转子部分采用运算放大器搭建四个光学测量臂传过来的12个通道的电信号的调理电路,包括将电压信号转换成适合adc芯片的电压输入范围的电压转换电路和低通滤波电路,adc将输入的模拟量信号转化为数字信号,通过spi传入下位机soc芯片进行采集,下位机将采集到的信号每经过一定次数的平均值采样滤波后输入到缓存器,以减小采样误差;定子部分通过2.4g的wifi模块与转子部分进行通信,将转子部分经过滤波后的所有通道的信号全部传入定子部分的soc芯片;定子部分的soc还具有调零与功能自检模块,将信号通过lcd显示或者通过以太网将数据发送到上位机,由上位机来进行对数据的分析与处理。
12.一种船用推力扭矩综合监测方法,采用船用推力扭矩综合监测装置,具体包括以下步骤:
13.步骤一:两卡环安装在轴段上间隔δl的截面上,卡环间周向均匀布置4个二维光学测量臂;
14.步骤二:轴系存在扭矩和推力时,激光发射器发出的激光光斑在四象限光敏探测器上的位置将发生变化(δx,δy),四个象限内的光电转换器的输出电压v1、v2、v3、v4也将随之变化;
15.步骤三:四极光电二极管阵列输出的三组电压信号分别为:
16.p2=(v2 v3)-(v1 v4)
17.p3=(v1 v2)-(v3 v4)
18.p4=v1 v2 v3 v419.式中:p2为光电二极管的底部象限d2和d3产生的电信号减去顶部象限d1和d4的电压信号;p3为光电二极管象限d1和d2产生的电太信号减去象限d3和d4产生的电压信号;p4为光电二极管四象限d1、d2、d3、d4产生的电压信号之和;
20.则激光光斑在四象限感器上的相对位移(δx,δy)计算公式为:
[0021][0022]
δx,δy分别对应光斑中心在四象限传感器x和y方向的偏移量,将p2、p3、p4三个电压信号送至含adc的信号处理单元,可对x、y方向的推力和扭力施行实时测量;
[0023]
步骤四:轴系扭矩m和推力t由激光光斑位置变化(δx,δy)计算,具体公式为:
[0024][0025][0026]
式中,e为弹性模量、a为未变形前的轴截面面积、g为剪切模量、i
p
为惯性矩、δl为卡环间距均为常数,则推力系统k
t
和扭矩系数km为常数,通过实验室标定获得。
[0027]
本发明的有益效果是:
[0028]
本发明提出了一种船用推力扭矩综合监测装置,将轴系推力和扭矩转换为光学测量臂的位移,通过四象限光敏探测器准确测位移变化,经标定后,获得准确的测量结果。
[0029]
(1)本发明提出了二维光学测量方法,采用四象限差分测量原理,同时获得轴系推力和推力导致的光学测量臂的二维位移变化,测量准确性高于一般应变片式测量方法;
[0030]
(2)本发明所述的推力和扭矩在光学传感器上产生得位移是正交的,有效降低二者相互影响,进一步提高测量准确性;
[0031]
(3)本发明所述的卡环式推力扭矩监测装置的设计方法,装置可拆卸和重复使用,为监测装置的校准提供了有效技术手段,便于监测装置长期可靠使用。
附图说明
[0032]
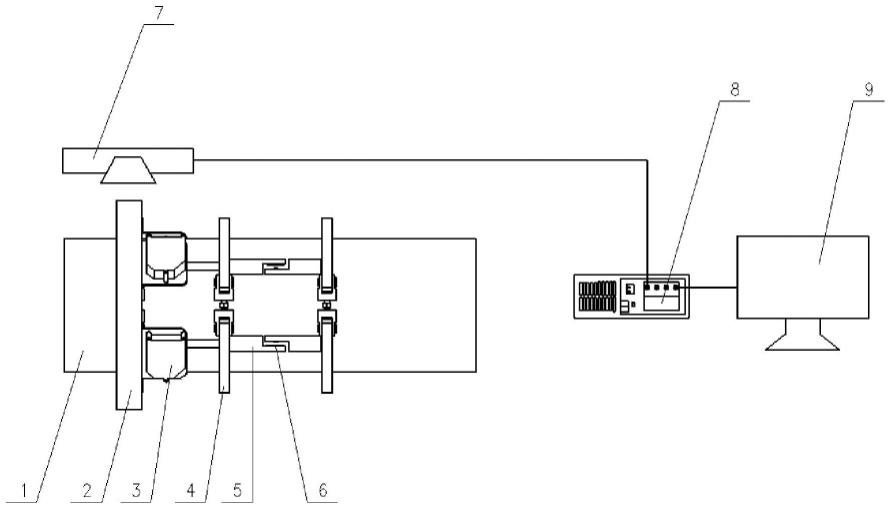
图1为本发明的船用推力扭矩综合监测装置示意图;
[0033]
图2为二维光学测量臂的两段式结构示意图;
[0034]
图3为四象限光敏探测器示意图;
[0035]
图4为四象限光敏探测器信号处理电路;
[0036]
图5为信号处理电路整体框图。
具体实施方式
[0037]
下面结合附图与实施例对本发明作进一步说明。
[0038]
如图1所示,本发明的一种船用推力扭矩综合监测装置,包括在旋转轴1上安装的供电模块2、转子采集模块3、卡环4、二维光学测量臂5、定子支架6、轴旁供电模块7、采集仪8和上位机9。二维光学测量臂5由两个可以产生相对移动的测量臂组成,一个测量臂内装有激光发射器,另外一个测量臂内装有四象限探测器;两个测量臂均通过卡环4装在船用轴承上,激光发射器发出的光源直接照射在四象限探测器的中心位置,光轴方向和轴承的轴向正交,通过将非面内的正交分量转化为四象限探测器的面内正交分量;当推力和扭矩产生式,光斑在四象限探测器上产生相对位移,能够同时对推力和扭矩进校测量。
[0039]
如图2所示,二维光学测量臂5为两段式结构,分别固定在卡环4端面上,两段相临处分别安装激光发射器ld和四象限光敏探测器qp。如图3所示,四象限探测器qp是由对称分布在直角坐标系四个象限且性能相近的光电转换器组成。轴系存在扭矩和推力时,激光发射器发出的激光光斑在四象限光敏探测器上的位置将发生变化(δx,δy),四个象限内的光电转换器发出的电压(v1、v2、v3、v4)也将随之变化。
[0040]
根据四象限光电传感器的工作原理,具体实施如图4所示的电路。当激光源照射到
四象限探测器上时,四象限探测器会将光能转化为电压,再通过四则运算给出光斑质心相对四象限中心的偏移量。该偏移量以模拟电压的形式输送至模拟数字转换器(adc)。
[0041]
本发明的扭矩推力光学传感器中光电传感器芯片采用四极光电二极管阵列,带有一个7针连接器,具有电流至电压放大器,所提供的和信号是所有四个象限二极管信号之和,所提供的差信号是阵列中的成对的光电二极管元件所感测的光强度差。四极光电二极管阵列输出的三组电压信号分别为:
[0042]
p2=(v2 v3)-(v1 v4)
[0043]
p3=(v1 v2)-(v3 v4)
[0044]
p4=v1 v2 v3 v4[0045]
式中:p2为光电二极管的底部象限d2和d3产生的电信号减去顶部象限d1和d4的电信号;p3为光电二极管象限d1和d2产生的电信号减去象限d3和d4产生的电信号;p4为光电二极管四象限d1、d2、d3、d4产生的电信号之和。
[0046]
则激光光斑在四象限感器上的相对位移(δx,δy)计算公式为:
[0047][0048]
信号处理电路如图5所示,测量臂的输出3路信号x、y、z,分别对应图3中b-t,l-r,sum电信号,即p2、p3、p4。推力仪上共有四个测量臂,则同时输出12路信号。本发明涉及的信号处理方案包括转子部分和定子部分,转子部分采用运算放大器搭建四个光学测量臂传过来的12个通道的电信号的调理电路,包括将电压信号转换成适合adc芯片的电压输入范围的电压转换电路和低通滤波电路。adc将输入的模拟量信号转化为数字信号,通过spi传入下位机soc芯片进行采集。下位机将采集到的信号每经过一定次数的平均值采样滤波后输入到缓存器,以减小采样误差。
[0049]
定子部分通过2.4g的wifi模块与转子部分进行通信,将转子部分经过滤波后的所有通道的信号全部传入定子部分的soc芯片。定子部分的soc还具有调零与功能自检模块,并将信号通过lcd显示或者通过以太网将数据发送到上位机,由上位机来进行对数据的分析与处理。
[0050]
轴系扭矩m和推力t可由激光光斑位置变化(δx,δy)计算,具体公式为:
[0051][0052][0053]
式中,e为弹性模量、a为未变形前的轴截面面积、g为剪切模量、i
p
为惯性矩、δl为卡环间距均为常数,则推力系统k
t
和扭矩系数km为常数,因此可以通过实验室标定获得。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。