1.本实用新型涉及灌浆机技术领域,具体而言,涉及一种全自动智能灌浆机。
背景技术:
2.在一些建筑施工的中会使用到的智能灌浆机,主要用于对混凝土混合液输送,灌浆机主要由绞龙、电机、输送管、锥形筒等组成,具有体积小 ,操作便利等优势,受到行业的一致认可推广,但现有的灌浆机在使用的过程中也会遇到问题,如,因锥形筒直接暴露至外部,锥形筒内缺少清洗的结构,导致残留至锥形筒内部的混凝土混合液与外界接触后凝固于锥形筒,如不及时的清理会导致过多的凝结块掉落于混合液中被输送出,直接影响混合液的质量,所以我们提出一种全自动智能灌浆机,来解决上述中遇到的问题。
技术实现要素:
3.本实用新型的主要目的在于提供一种全自动智能灌浆机,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种全自动智能灌浆机,包括底座与筒体,所述底座的上表面固定连接筒体,所述筒体上表面固定连接锥形筒,所述锥形筒与筒体连通,所述锥形筒内设置有刮条组件,所述筒体内转动连接第一连接轴,所述第一连接轴的外围固定连接绞龙。
6.作为优选的,所述底座的 上表面固定连接推杆,所述底座的下表面四角均固定连接万向轮。
7.作为优选的,所述筒体的一端固定连接第一电机,所述第一电机的输出端与第一连接轴固定连接。
8.作为优选的,所述筒体的一端固定连接有输送管,所述输送管与筒体连通。
9.作为优选的,所述刮条组件包括第三连接轴、刮条、连杆,所述第三连接轴的外围转动连接刮条,所述刮条的一侧与锥形筒内壁抵紧,所述第三连接轴的外围固定连接连杆,所述连杆的一端与第二连接轴固定连接;
10.所述第二连接轴转动连接于顶板的锥形筒的上表面,所述第二连接轴的上端延伸至顶板的外部,所述第二连接轴的上端固定连接第二电机,所述第二电机的外围通过固定架与顶板固定连接。
11.作为优选的,所述刮条的上下表面固定均固定连接有扭簧安装块,两个所述扭簧安装块的一端均固定连接扭簧,两个所述扭簧的一端均与顶块固定连接,两个所述顶块的一端均第三连接轴固定连接,所述第三连接轴的一端穿过扭簧安装块。
12.与现有技术相比,本实用新型具有如下有益效果:
13.在设备使用后,可在第二电机启动的作用下带动第二连接轴转动,第二连接轴的转动会带动刮条组件上的连杆与第三连接轴转动,从而使刮条圆周转动对锥形筒内壁上的混凝土残留刮落,减少残留混凝土混合液的残留,从而避免残留的混合液凝固的现象发生,
进而保证混合液的质量;
14.在刮条圆周运动与锥形筒内壁接触后,对刮条会产生一定的推动力,使刮条带动扭簧安装块小幅度的在第三连接轴上转动,使扭簧产生反作用力最终使刮条始终与锥形筒紧紧贴合,增加挂动的效果。
附图说明
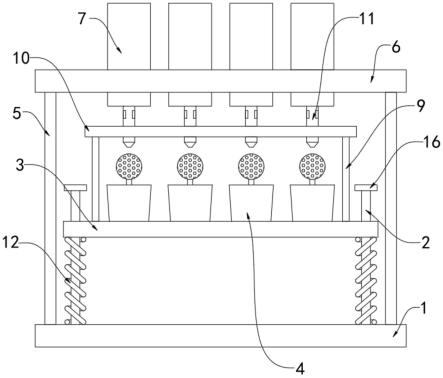
15.图1为本实用新型一种全自动智能灌浆机的整体结构示意图。
16.图2为本实用新型一种全自动智能灌浆机的刮条组件结构示意图。
17.图3为本实用新型一种全自动智能灌浆机的局部结构示意图。
18.图4为本实用新型一种全自动智能灌浆机的a处放大结构示意图。
19.图中:1、底座;2、筒体;3、锥形筒;4、刮条组件;401、第三连接轴;402、刮条;403、连杆;404、扭簧安装块;405、扭簧;406、顶块;5、第一连接轴;6、绞龙;7、第一电机;8、输送管;9、第二连接轴;10、第二电机;11、顶板;12、推杆;13、万向轮。
具体实施方式
20.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例
21.如图1至4所示,一种全自动智能灌浆机,包括底座1与筒体2,底座1的上表面固定连接筒体2,筒体2上表面固定连接锥形筒3,锥形筒3与筒体2连通,锥形筒3内设置有刮条组件4,筒体2内转动连接第一连接轴5,第一连接轴5的外围固定连接绞龙6。
22.在本技术中,底座1的 上表面固定连接推杆12,底座1的下表面四角均固定连接万向轮13。筒体2的一端固定连接第一电机7,第一电机7的输出端与第一连接轴5固定连接。筒体2的一端固定连接有输送管8,输送管8与筒体2连通。刮条组件4包括第三连接轴401、刮条402、连杆403,第三连接轴401的外围转动连接刮条402,刮条402的一侧与锥形筒3内壁抵紧,第三连接轴401的外围固定连接连杆403,连杆403的一端与第二连接轴9固定连接;第二连接轴9转动连接于顶板11的锥形筒3的上表面,第二连接轴9的上端延伸至顶板11的外部,第二连接轴9的上端固定连接第二电机10,第二电机10的外围通过固定架与顶板11固定连接。
23.需要说明的是,在第二电机10启动的作用下带动第二连接轴9转动,第二连接轴9的转动会带动刮条组件4上的连杆403与第三连接轴401转动,从而使刮条402圆周转动对锥形筒3内壁上的混凝土残留刮落,减少残留混凝土混合液的残留,从而避免残留的混合液凝固的现象发生,进而保证混合液的质量;在刮条402圆周运动与锥形筒3内壁接触后,对刮条402会产生一定的推动力,使刮条402带动扭簧安装块404小幅度的在第三连接轴401上转动,使扭簧405产生反作用力最终使刮条402始终与锥形筒3紧紧贴合,增加挂动的效果,第二连接轴9使转动连接于顶板11内部不能移动,在刮条402圆周运动后,可对锥形筒3内部注
水提高清理效果,清理后的混合液可通过输送管8输出,绞龙6转动后把筒体2内部的混合液输送至输送管8内。
24.在本技术中,刮条402的上下表面固定均固定连接有扭簧安装块404,两个扭簧安装块404的一端均固定连接扭簧405,两个扭簧405的一端均与顶块406固定连接,两个顶块406的一端均第三连接轴401固定连接,第三连接轴401的一端穿过扭簧安装块404。
25.需要说明的是,刮条402是转动连接于第三连接轴401上的,刮条402不能移动。
26.一种全自动智能灌浆机的工作原理:
27.首先,在设备使用后,可在第二电机10启动的作用下带动第二连接轴9转动,第二连接轴9的转动会带动刮条组件4上的连杆403与第三连接轴401转动,从而使刮条402圆周转动对锥形筒3内壁上的混凝土残留刮落,减少残留混凝土混合液的残留,从而避免残留的混合液凝固的现象发生,进而保证混合液的质量;在刮条402圆周运动与锥形筒3内壁接触后,对刮条402会产生一定的推动力,使刮条402带动扭簧安装块404小幅度的在第三连接轴401上转动,使扭簧405产生反作用力最终使刮条402始终与锥形筒3紧紧贴合,增加挂动的效果。
28.显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本实用新型保护的范围。本实用新型中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。