1.本实用新型涉及巡检设备技术领域,特别是一种新型隧道巡检小车。
背景技术:
2.随着科技的发展,用于隧道(包括建设中和应用中的隧道)等区域积水巡检的智能机器人小车越来越多的得到了应用。现有用于隧道等区域积水巡检的智能机器人小车主要结构包括触摸显示屏、超声波传感器、激光雷达、电驱车轮、检测探头等等,工作前,工作人员操作触摸显示屏设定小车的行驶路径和巡检模式,小车能按触摸显示屏内主控电路板的软件编程控制、自主在巡检区域运动,到达程序设定的检测区域后小车暂时停止运动,然后其检测探头在电动伸缩杆的作用下向下运动接近地面对相关区域是否有积水进行探测,探测到积水信息后通过车载通信设备提示隧道外或值班室内的人员,进而相关工作人员查明积水具体原因、进行处置,防止隧道积水得不到及时处置造成不可预估的严重后果(比如发生管涌等,相关人员接收到信息后就能及时关闭闸门等,防止造成大的水淹隧道事故)。小车运动过程中,车身前端、后端超声波传感器及前后端激光雷达结合触摸显示屏内主控电路板的软件单元规划机器人小车的运动路径方向、并防止自身和隧道内壁、人员、物品等发生碰撞,同时能对接近的人员通过扬声器进行声音提示,防止人员和小车碰撞受到不必要的伤害等。
3.虽然现有隧道等区域积水巡检的智能机器人小车具有较多的优点,但是受到结构所限,或多或少还是存在一些具体的技术问题,具体体现如下。其一:其检测积水的模式是基于主控电路板内部的编程控制,也就是说只能对数量较少的点位进行检测是否积水,这样当检测的区域没有积水,而没有设定为检测的区域积水时,由于无法检测到具体的积水信息,会对隧道的安全带来不利影响。其二:其检测积水的方式是通过探头实现,探头检测中由于处于固定模式,只能对较小区域范围内进行积水检测,检测的方位相对有限,同样存在漏检的几率。基于上述,提供一种能尽可能扩大检测范围的设备显得尤为必要。
技术实现要素:
4.为了克服现有用于隧道等区域积水巡检的智能机器人小车由于结构所限,存在如背景所述弊端,本实用新型提供了基于积水巡检的智能机器人小车本体,不但具有普通积水巡检的智能机器人小车自主规划路径、避障、自动巡检等功能,还能通过滚动积水探测机构对小车经过的路径进行接近无缝的检测积水,实现更好的积水检测覆盖效果,工作人员能第一时间针对性进行处置,减小了积水带来的次生损失,由此为隧道安全起到了有利技术支持的一种新型隧道巡检小车。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种新型隧道巡检小车,包括机器人小车本体,其特征在于还具有检测提示机构、车控电路、提示电路;所述机器人小车本体的电驱车轮轮子是密封中空结构,检测提示机构包括蓄电池、充电插座、电源开关、无线发射电路、蜂鸣器和探测金属片,两只金属片间隔距
离安装在轮子的外侧端,蓄电池、充电插座、电源开关、无线发射电路、蜂鸣器安装在轮子内;所述金属片的一只和无线发射电路的信号输入端电性连接,无线发射电路的电源输出端和蜂鸣器电源输入一端电性连接;所述提示电路包括安装在元件盒内多套无线接收电路及电源模块,电源模块的电源输出端和无线接收电路的电源输入端分别电性连接;所述车控电路安装在小车本体内,并和小车本体内蓄电池两极分别电性连接,车控电路的电源输出端和小车本体的总电源输入端电性连接。
7.进一步地,所述金属片其外表面弧度和轮子外侧端弧度一致。
8.进一步地,所述检测提示机构的无线发射电路包括电性连接的无线发射电路模块、继电器、电阻和npn三极管,无线信号发射电路模块的其中一只按键下两个触点连接在一起,继电器正极电源输入端和控制电源输入端连接,继电器常开触点端和无线发射电路模块正极电源输入端连接,电阻一端和npn三极管基极连接,npn三极管集电极和继电器负极电源输入端连接,npn三极管发射极和无线发射电路模块的负极电源输入端连接。
9.进一步地,所述车控电路包括电性连接的无线接收电路模块、电阻、npn三极管、继电器,无线接收电路模块的正极电源输入端和继电器正极电源输入端及控制电源输入端连接,无线接收电路模块的第一路输出端和电阻一端连接,电阻另一端和npn三极管基极连接,npn三极管集电极和继电器负极电源输入端连接,无线接收电路模块的负极电源输入端和npn三极管发射极连接。
10.进一步地,所述提示电路的每套无线接收电路包括电性连接的无线接收电路模块成品、电阻、发光二极管,无线接收电路模块成品负极电源输入端和发光二极管负极电源输入端连接,无线接收电路模块的一路输出端和电阻一端分别连接,电阻另一端和发光二极管正极连接。
11.本实用新型有益效果是:本新型不但具有普通积水巡检的智能机器人小车自主规划路径、避障、自动巡检等功能,还能通过滚动的检测提示机构对小车本体车轮经过的路径进行接近无缝检测积水,实现更好的积水检测覆盖效果,探测到积水后能控制小车本体停止运动,这样,值班室内的提示电路接收到信号后,工作人员能第一时间针对性进行处置,减小了积水带来的次生损失,由此为隧道安全起到了有利技术支持。基于上述,所以本实用新型具有好的应用前景。
附图说明
12.以下结合附图和实施例将本实用新型做进一步说明。
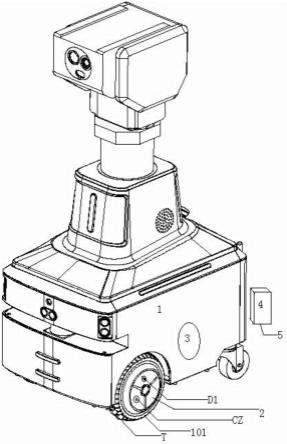
13.图1是本实用新型的结构示意图。
14.图2、3、4是本实用新型电路图。
具体实施方式
15.图1、2、3、4中所示,一种新型隧道巡检小车,包括具有车身、超声波传感器、触摸显示屏、激光雷达、万向车轮、电驱车轮(和电动自行车后轮无刷电机驱动的车轮结构一致)、蓄电池、警示灯带、扬声器、充电插座以及其他必要部件的积水巡检的智能机器人小车本体1,还具有检测提示机构2、车控电路3、提示电路4;所述机器人小车本体的电驱车轮101轮子是密封中空塑料结构、且其轮毂外侧套有橡胶防滑套,检测提示机构2包括蓄电池g1、充电
插座cz2、电源开关d1、无线发射电路、蜂鸣器b1和探测金属片t,两只铜质金属片t(和其内侧端连接的导线经由轮子开孔进入轮子内、且开孔用密封胶密封)间隔一定距离(3毫米)用胶粘接在车轮101防滑套的外侧端,蓄电池、充电插座、电源开关、无线发射电路、蜂鸣器安装在空心轮子内的电路板上;所述提示电路4包括安装在元件盒5电路板上的多套无线接收电路及电源模块a4,元件盒5安装在值班室内;所述车控电路3安装在小车本体`内电路板上。
16.图1、2、3、4中所示,金属片t其外表面弧度和防滑套外侧端弧度一致。检测提示机构的无线发射电路包括经电路板布线连接型号sf2500的无线发射电路模块成品a1、继电器k1、电阻r1和npn三极管q1,无线发射电路模块成品a1其具有两个电源输入端及四只无线信号发射按键,无线发射电路模块a1内部具有编码电路,通过编码电路编码能防止同型号无线发射电路模块发射无线信号相互干扰,无线信号发射电路模块a1的第一只按键s1下两个触点连接在一起,继电器k1正极电源输入端和控制电源输入端连接,继电器k1常开触点端和无线发射电路模块a1正极电源输入端1脚连接,电阻r1一端和npn三极管q1基极连接,npn三极管q1集电极和继电器k1负极电源输入端连接,npn三极管q1发射极和无线发射电路模块a1的负极电源输入端2脚连接。车控电路包括经电路板布线连接型号sf2500的无线接收电路模块成品a2、电阻r2、npn三极管q2、继电器k2,无线接收电路模块a2内部具有编码电路,通过编码电路编码能防止同型号无线接收电路模块接收无线信号相互干扰,无线接收电路模块a2的编码和检测提示机构的无线发射电路模块a1的编码电路编码一致,无线接收电路模块a2的正极电源输入端1脚和继电器k2正极电源输入端及控制电源输入端连接,无线接收电路模块a2的第一路输出端4脚和电阻r2一端连接,电阻r2另一端和npn三极管q2基极连接,npn三极管q2集电极和继电器k2负极电源输入端连接,无线接收电路模块a2的负极电源输入端3脚(2、5、6、7脚悬空)和npn三极管q2发射极连接。提示电路的每套无线接收电路包括经电路板布线连接型号sf2500的无线接收电路模块成品a,电阻r4,发光二极管vl1,无线接收电路模块a内部具有编码电路,通过编码电路编码能防止同型号无线接收电路模块接收无线信号相互干扰,无线接收电路模块成品a和无线发射电路模块a1的编码电路编码一致,无线接收电路模块成品a负极电源输入端3脚和发光二极管vl1负极电源输入端连接,无线接收电路模块成品a的一路输出端4脚和电阻r4一端分别连接,电阻r4另一端和发光二极管vl1正极连接,发光二极管vl1发光面位于元件盒前端开孔外。
17.图1、2、3、4所示,蓄电池g1两极和充电插座cz2(不充电时用胶塞塞住充电孔、防止水进入轮子内)两极分别经导线连接(通过外部12v电源充电器插入充电插座cz2内,能为蓄电池g1充电),蓄电池g1正极和电源开关d1(手柄位于轮子左侧端外)一端经导线连接,电源开关d1另一端和无线发射电路的正极电源输入端继电器k1正极电源输入端、其中一只金属片t内侧端连接,另一只金属片t和无线发射电路的信号输入端电阻r1另一端经导线连接,无线发射电路的电源输出端继电器k1常开触点端和蜂鸣器b1正极电源输入端经导线连接,蓄电池g1负极和无线发射电路a1的负极电源输入端2脚及蜂鸣器b1的负极电源输入端经导线连接。提示电路中,电源模块a4的电源输入端1及2脚和交流220v电源两极分别经导线连接,电源模块a4的电源输出端3及4脚和无线接收电路的电源输入端无线接收电路模块a的1及3脚分别经导线连接。车控电路的电源输入端和小车本体内蓄电池g2两极分别经导线连接,车控电路的电源输出端继电器k2常闭触点端及npn三极管q2发射极和小车本体的总电
源输入端a5经导线连接。
18.图1、2、3、4所示,本新型具有普通智能机器人小车的所有功能,工作前,工作人员操作触摸显示屏设定小车本体1的行驶路径和巡检模式,小车本体能按触摸显示屏内主控电路板的软件编程控制、自主在巡检区域运动,小车本体1运动过程中,车身前端、后端超声波传感器及前后端激光雷达结合触摸显示屏内主控电路板的软件单元规划机器人小车的运动路径方向、并防止自身和隧道内壁、人员、物品等发生碰撞,同时能对接近的人员通过扬声器进行声音提示,防止人员和小车碰撞受到不必要的伤害等。本新型具体使用前打开防水电源开关d1后再打开小车本体1的总电源开关d2,检测提示机构以及小车本体内的总电源输入端(小车本体内的蓄电池g2经继电器k2控制电源输入端及常闭触点端为小车本体供电)得电。小车本体行进、车轮转动中接触的区域没有发生积水时,两只金属片t之间电阻无穷大,这样,npn三极管q1基极电压为零不会导通,那么继电器k1不会得电吸合其控制电源输入端和常开触点端开路,那么,无线发射电路模块a1不会发射出无线信号。小车本体行进、车轮转动中接触的区域发生积水时,两只金属片t之间被水淹没之间的电阻变小,这样,蓄电池g1输出的电源正极经水、电阻r1限流降压后进入npn三极管q1基极高于0.7v,npn三极管q1导通集电极输出低电平进入继电器k1负极电源输入端,进而继电器k1得电吸合其控制电源输入端和常开触点端闭合,蜂鸣器b得电发声提示后续到达现场的人员具体积水处;由于,无线发射电路模块a1的第一只发射按键s1下两个触点连接在一起,所以此时无线发射电路模块a1会发射出第一路无线闭合信号。
19.图1、2、3、4所示,当探测到积水,无线发射电路模块a1发射出第一路无线闭合信号,无线接收电路模块a2接收到后其3脚输出高电平经电阻r2限流降压进入npn三极管q2基极,npn三极管q2导通集电极输出低电平进入继电器k2负极电源输入端,继电器k2得电吸合其控制电源输入端和常闭触点端开路,小车本体的总电源输入端失电,这样,本新型就能在探测到积水后停止运动,方便工作人员查找到积水处。无线发射电路模块a1发射出第一路无线闭合信号,2500米范围内,无线接收电路模块a接收到后其4脚会输出高电平经电阻r4限流降压进入发光二极管vl1正极电源输入端,于是,发光二极管vl1得电发光提示值班室内工作人员隧道内发生积水及时进行查看。通过上述所有电路及机构共同作用,本新型能通过滚动的检测提示机构对小车本体车轮经过的路径进行接近无缝检测积水,实现更好的积水检测覆盖效果,探测到积水后能控制小车本体停止运动,工作人员能第一时间针对性进行处置,减小了积水带来的次生损失,由此为隧道安全起到了有利技术支持。电路中,电阻r1、r2、r4阻值分别是4.7k、1k、1.8k;电源模块a4是型号220v/12v/1kw的交流22ov转直流12v开关电源模块成品;发光二极管vl1是红色发光二极管;npn三极管q1、q2型号是9013;蜂鸣器b1是型号fm12v的有源连续声蜂鸣报警器成品;继电器k1、k2是dc12v继电器。
20.应当理解的是,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。