1.本实用新型涉及一种移动袋装物料检重领域,特别是一种抓取式检重称。
背景技术:
2.现有袋装物料输送线上广泛使用的检重称分为两大类:
3.1、作为输送线的一部分,可对通过的袋装物料逐一称重,这种称的优点是可称量在检重称上通过的每一袋物料的重量;缺点是,因为称重是在动态下进行的,所以精度不会太高且不稳定,对于对称量精度要求高的用户是很难满足其需要。
4.2、从输送线上将袋装物料取下进行称重,称重后再将袋装物料放回的静态称,这种称现有结构大都是在输送线旁安装一皮带称,通过溜槽或转弯输送机与输送线相连接,利用气缸或电动推杆将袋装物料推出输送线,输送到检重称上称重,后再通过转弯或溜槽返回输送线,这种检重称精度比较高,缺点是占地面积大,结构臃肿,称重周期长,尤其不适合现有老线加装或建筑面积有限的新输送线。
技术实现要素:
5.本实用新型针对以上背景技术所述的问题,提供一种精度高,性能稳定,结构简单的随动抓取式检重称。
6.本实用新型采用如下技术方案:
7.一种随动抓取式检重称,包括机架,称重传感器,抓取机械手,机架横跨于输送线上,机架上安装有水平移动装置和挡包装置,水平移动装置上装有升降装置,升降装置上装有称重传感器,称重传感器下方装有抓袋机械手。
8.采用上述技术方案的本实用新型与现有技术相比,能够实现随动抓取、后称重的方式,称量过程属于静态取值,达到较高的称量精度,本设备横跨于输送线上,具有减少厂地占用的优点。
9.本实用新型的优选方案是:
10.水平移动装置中的滑轨通过滑轨安装座与机架中的承重架连接,滑轨上装有滑块,滑块上装有行走座,行走座上装有伺服电机,伺服电机中的齿轮与齿条啮合,齿条与滑块连接。
11.行走座上装有升降装置中的升降气缸和导向座,导向座上装有传感器吊座,传感器吊座的一端与升降气缸连接,传感器吊座的另一端装有称重传感器,称重传感器下方连接抓袋机械手。
12.抓袋机械手中的吊架与称重传感器连接,吊架上装有抓取气缸,抓取气缸与抓手连接。
13.挡包装置置于机架的前立柱上,挡包装置中的挡包气缸位于前立柱的上半部,挡包气缸下端连接挡板。
14.升降气缸置于行走座上方,导向座置于行走座下方。
15.装有挡包装置的机架前立柱上装有来料检测装置。
附图说明
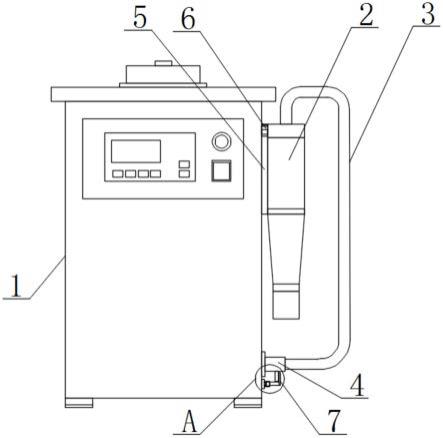
16.图1是本实用新型实施例的结构示意图。
17.图2是图1的侧视图。
18.图3为挡包装置的局部视图。
具体实施方式
19.下面结合实施例详述本实用新型:
20.图中:机架1、升降装置2、水平移动装置3、称重传感器4、抓袋机械手5、挡包装置6、来料检测装置7、抓手8、吊架9、抓取气缸10、传感器吊座11、导向座12、滑轨13、滑块14、行走座15、升降气缸16、伺服电机17、齿轮18、齿条19、滑轨安装座20、前立柱21、挡包气缸22、挡板23、承载架24、横梁25。
21.本实施例中,机架1横跨于输送线上,机架1上安装有水平移动装置3和挡包装置6,水平移动装置3上装有升降装置2,升降装置2上装有称重传感器4,称重传感器4下方装有抓袋机械手5。
22.水平移动装置3中的滑轨13通过滑轨安装座20与机架1中的承重架24连接,滑轨13上装有滑块14,滑块14上装有行走座15,滑轨13 呈对称状设置为两个,滑块14呈对称状设置为两个,行走座15上装有伺服电机17,伺服电机17通过齿轮18与齿条19啮合,齿条19与滑块14连接。
23.行走座15上装有升降装置2中的升降气缸16和导向座12,行走座15的上方装有升降气缸16;导向座12位于行走座15的下方。
24.导向座12上装有传感器吊座11,传感器吊座11的一端与升降气缸16连接,传感器吊座11的另一端装有称重传感器4,称重传感器4下方连接抓袋机械手5。
25.抓袋机械手5中的吊架9与称重传感器4连接,吊架9上装有抓取气缸10,抓取气缸10与抓手8连接。
26.机架1中的前立柱21通过横梁25装有挡包装置6,挡包装置6中的挡包气缸22位于前立柱21的上半部,挡包气缸22下端连接挡板23。
27.装有挡包装置6的前立柱21上装有来料检测装置7,来料检测装置7可以采用色标电子眼。
28.称重传感器4下方的抓取机械手5,随动抓取物料的称重方式:在对物料检测过程中,抓取机械手5以物料等速度跟随物料并同时抓取,抓取完成提起物料到指定高度称重。
29.袋装物料在进入机架1前,来料检测装置7获取袋装物料的速度及状况,正常姿态的物料被抓取机械手5以物料等速度跟随并同时抓取,抓取完成后升降装置2提起物料到指定高度进行称重,完成称重后的物料最后被重新放回在运行中的输送线上。
30.当袋装物料接近本设备时来料检测装置7,首先对来料状态及速度进行检测,进而抓手8对经过的袋装物料抓取,抓取的同时以袋装物料等速进行跟随:就是说抓取和跟随是同时进行的,抓取完成后升降装置2将袋装物料提升到设定高度进行称量,获取重量值后再将其重新放到输送线中。
31.本实施例中,采用随动抓取、后称量的方式,称量过程属静态取值,可达到较高的称量精度;本设备横置于输送线上只占用输送线上方空间,具有不占用更多场地的优势。
32.传感器吊座11与导向座12配合克服了抓取袋装物料过程对升降气缸16活塞杆造成的侧向力,消除抓取机械手5前后左右四个方向的摆动。称重传感器4安装在传感器吊座11的正下方。最下方的抓袋机械手5包括吊架9、抓手8和抓取气缸10,此组件用紧固件吊装在称重传感器4的下方。采用带座外球面球轴承作为抓手8张合时回转支撑。
33.本实用新型跟随抓取称重的过程简述如下:
34.首先,设备启动后控制程序对设备进行检测,然后进入准备抓取的状态:水平移动装置3位于设备前端起始位置,抓袋机械手5位于最下方,抓手8是打开的状态。
35.当袋装物料被输送线输送过来时,首先通过检测区,来料检测装置7对其进行检测,确定袋装物料是否满足抓取条件,如有叠包、横包的情况视为不宜抓取作放过处理。正常状态的袋装物料通过检测获得其运行数据,这些数据传递给微机进行程序运算得到其运行速度,当袋装物料到达抓袋机械手5下方时,抓手8在抓取气缸10的作用下合拢抓取袋装物料,与此同时,伺机电机17驱动水平移动装置3带动抓取机械手5以袋装物料等速同向跟随袋装物料行进,抓取完成的同时升降气缸16将袋装物料提至上限位,这时伺服电机17停,水平移动装置3停止行进,待其稳定后通过称重传感器对袋装物料进行称重,获取的重量值显示在人机界面上。到此时对物料的称重完成。
36.将称重后的袋装物料放回到输送线中:首先由来料检测装置7对输送过来的袋装物料进行检测,判别相邻两包间的间隙是否满足放包条件,如果满足,抓取气缸10推动抓手8松开袋装物料将其放入两包间隙汇入输送线。如不满足条件间隙过小,则起动位于前端的挡包装置6,挡包气缸22将挡板23推下,对后面的袋装物料进行拦截,以达到放包条件。
37.本实用新型在对输送线上的袋装物料的抓取、称重到放回的整个过程,对输送线正常传送物料是不造成任何影响的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。