1.本实用新型涉及工业机器人关节轴校准技术领域,尤其涉及一种工业机器人关节轴零位校准装置。
背景技术:
2.工业机器人作为智能制造的核心装备,凭借任务柔性高、人机交互与协同能力强、空间要求低、制造与维护成本低等显著优势,近年来得到了制造业的广泛青睐。
3.仅在工业机器人得到充分和正确标定零点时,它的使用效果才会最好。因为只有这样,机器人才能达到它最高的点精度和轨迹精度或者完全能够以编程设定的动作运动。
4.研究表明,工业机器人的关节轴零位误差对工业机器人的位置精度影响最大,现有的大多数研究者重点研究的是工业机器人关节轴的几何误差的建模和补偿,因此也出现了多种针对工业机器人关节轴的零位校准装置。
5.但是现有技术中的工业机器人关节轴零位校准装置往往都是采用激光跟踪仪等激光设备进行校准,过程较为耗时,操作较为复杂,且体积较大,携带困难,导致现场维修不方便。
技术实现要素:
6.本实用新型的目的在于提供一种工业机器人关节轴零位校准装置,以解决上述背景技术中存在的技术问题。
7.为实现上述目的,本实用新型的技术方案如下:
8.一种工业机器人关节轴零位校准装置,包括:触头组件、手柄组件、移动滑板和固定底座,所述固定底座固定安装在工业机器人关节轴零点位置,所述固定底座外侧端中部固定安装有感应块,所述感应块外表面中心位置处开设有对应工业机器人关节轴零点位置的凹槽,所述触头组件包括探针和第一固定套,所述探针可伸缩式滑动连接在第一固定套内,所述探针头部与感应块外表面压紧接触,所述第一固定套尾部可拆卸式固定连接手柄组件一端,所述手柄组件内置用于检测感应块外表面深度的笔式传感器,所述移动滑板固定安装在工业机器人上且位置与固定底座相对,所述触头组件可拆卸式插接在固定底座上。
9.进一步的,所述第一固定套内部开设有t型滑孔,所述探针滑动连接在t型滑孔内,所述探针大头端与t型滑孔大径一端之间设置有复位弹簧,所述第一固定套尾部内壁可拆卸式固定连接有弹性挡圈,在复位弹簧的张力作用下探针尾部与弹性挡圈一端压紧接触。
10.进一步的,所述t型滑孔尾部靠近端口位置的内壁上开设有环形卡槽,所述弹性挡圈卡接在环形卡槽内。
11.进一步的,所述探针头部与凹槽相配合。
12.进一步的,所述固定套外部螺纹连接有端盖。
13.进一步的,所述手柄组件包括手柄、压缩弹簧、压头、衬套和第二固定套,所述手柄
内部开设有安装腔,所述衬套固定连接在安装腔尾部内壁中,所述第二固定套螺纹连接在衬套头部,所述压头滑动连接在安装腔靠近手柄头部的位置处,所述压头头部滑动贯穿手柄头部,所述压缩弹簧设置于压头与第二固定套之间,所述笔式传感器螺纹连接在第二固定套内壁上,所述笔式传感器头部与压头尾部相配合,所述笔式传感器与衬套之间间隙配合。
14.进一步的,还包括封堵,所述封堵采用热熔方式固定连接在衬套尾部端口处,所述笔式传感器尾部活动贯穿封堵中部并伸出至手柄尾部外侧。
15.进一步的,所述手柄头部内壁螺纹连接第一固定套尾部外壁。
16.进一步的,所述固定底座中部开设有插孔,所述第一固定套滑动插接在插孔中。
17.与现有技术相比,本实用新型的有益效果是:
18.将感应块通过固定底座预先安装至工业机器人关节轴的零点位置处,并将移动滑板固定安装在工业机器人上,使移动滑板与感应块相对设置,在工业机器人关节轴零位丢失的时候,维修人员只需将触头组件与手柄组件组装在一起,并将笔式传感器连接上零位校准辅助工具,然后将触头组件插接固定在移动滑板上,使工业机器人丢失零位的关节轴转动,在转动过程中探针始终与感应块外表面接触,由于感应块外表面中的凹槽对应工业机器人关节轴的零点位置,因而在探针在与感应块外表面接触的过程中通过笔式传感器能够实时检测感应块外表面深度,深度最深处即为工业机器人关节轴的零点位置,再通过机器人控制软件将该位置设定为工业机器人关节轴的零点位置即可完成工业机器人关节轴的零位校准;整个校准设备体积小便于携带,且操作方便,整个检测过程快速。
附图说明
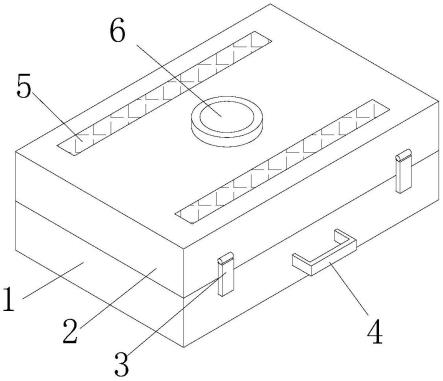
19.图1是本实用新型的结构视图;
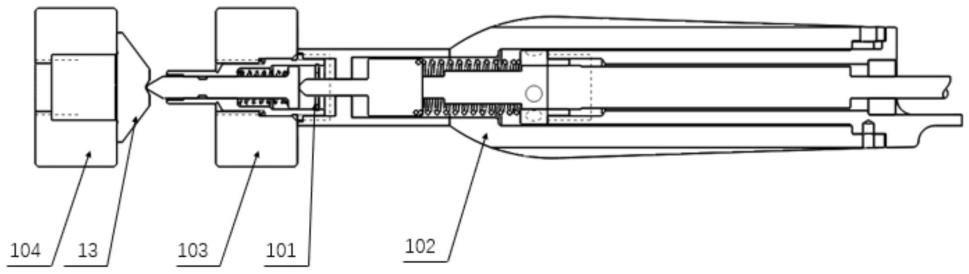
20.图2是本实用新型探针装置的结构视图;
21.图3是本实用新型手柄装置的结构视图。
22.附图中的标号为:1-探针,2-第一固定套,3-弹簧,4-弹性挡圈,5-端盖,6-手柄,7-弹簧,8-压头,9-笔式传感器,10-封堵,11-衬套,12-第二固定套,13-感应块,101-触头组件,102-手柄组件,103-移动滑板,104-固定底座。
具体实施方式
23.下面结合附图和实施例,对本实用新型作进一步详细说明。
24.参见图1~3所示,一种工业机器人关节轴零位校准装置,包括:触头组件101、手柄组件102、移动滑板103和固定底座104,固定底座104固定安装在工业机器人关节轴零点位置,固定底座104外侧端中部固定安装有感应块13,感应块13外表面中心位置处开设有对应工业机器人关节轴零点位置的凹槽,触头组件101包括探针1和第一固定套2,探针1可伸缩式滑动连接在第一固定套2内,探针1头部与感应块13外表面压紧接触,第一固定套2尾部可拆卸式固定连接手柄组件102一端,手柄组件102内置用于检测感应块13外表面深度的笔式传感器9,移动滑板103固定安装在工业机器人上且位置与固定底座104相对,触头组件101可拆卸式插接在固定底座104上。
25.第一固定套2内部开设有t型滑孔,探针1滑动连接在t型滑孔内,探针1大头端与t
型滑孔大径一端之间设置有复位弹簧3,第一固定套2尾部内壁可拆卸式固定连接有弹性挡圈4,在复位弹簧3的张力作用下探针1尾部与弹性挡圈4一端压紧接触。
26.t型滑孔尾部靠近端口位置的内壁上开设有环形卡槽,弹性挡圈4卡接在环形卡槽内。
27.探针1头部与凹槽相配合。
28.固定套2外部螺纹连接有端盖5,通过设置的端盖能够防止灰尘进入触头组件101内部,避免影响触头组件101的精度。
29.手柄组件102包括手柄6、压缩弹簧7、压头8、衬套11和第二固定套12,手柄6内部开设有安装腔,衬套11固定连接在安装腔尾部内壁中,第二固定套12螺纹连接在衬套11头部,压头8滑动连接在安装腔靠近手柄6头部的位置处,压头8头部滑动贯穿手柄6头部,压缩弹簧7设置于压头8与第二固定套12之间,笔式传感器9螺纹连接在第二固定套12内壁上,笔式传感器9头部与压头8尾部相配合,笔式传感器9与衬套11之间间隙配合。
30.还包括封堵10,封堵10采用热熔方式固定连接在衬套11尾部端口处,笔式传感器9尾部活动贯穿封堵中部并伸出至手柄6尾部外侧,通过设置的封堵10能够很好的防止笔式传感器9位移以及灰尘进入手柄6内部影响笔式传感器9的检测精度。
31.手柄6头部内壁螺纹连接第一固定套2尾部外壁。
32.固定底座104中部开设有插孔,第一固定套2滑动插接在插孔中,通过设置的插孔能够方便快速的将触头组件101与感应块13对准,提高检修效率。
33.在使用该装置的时候,将感应块13通过固定底座104预先安装至工业机器人关节轴的零点位置处,并将移动滑板103固定安装在工业机器人上,使移动滑板103与感应块13相对设置,在工业机器人关节轴零位丢失的时候,维修人员取出触头组件101和手柄组件102,将手柄组件102中的笔式传感器9连接上零位校准辅助工具,接着旋下端盖5,将第一固定套2尾部螺纹连接在手柄6头部上,接着将触头组件101插接在固定底座104中部开设的插孔中,使手柄6头部压紧移动滑板103外端面,此时由于手柄装置102内的压缩弹簧7力量大于触头装置101内的复位弹簧3,压缩弹簧7将压头8推出,压头8推动触头装置101内的探针1顶在感应块13上,由于感应块13外表面中的凹槽对应工业机器人关节轴的零点位置,使工业机器人丢失零位的关节轴转动,在转动过程中探针1始终与感应块13外表面接触,因而在探针1在与感应块13外表面接触的过程中通过笔式传感器9能够实时检测感应块13外表面深度,在压头8相对于感应块13位置变化的时候,压头8压笔式传感器9的深度也在不断变化,可以得到一个变化的数值曲线,通过该曲线的分析,可以获得工业机器人关节轴的零点位置,再通过机器人控制软件将该位置设定为工业机器人关节轴的零点位置即可完成工业机器人关节轴的零位校准;整个校准设备体积小便于携带,且操作方便,整个检测过程快速。
34.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何形式上的限制,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,依据本实用新型的技术实质,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本实用新型技术方案的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。