1.本技术涉及建筑机械领域,具体地涉及一种用于行走式塔机的检测装置及行走式塔机。
背景技术:
2.塔式起重机(也称为塔机、塔吊)因其作业空间大,起吊重量大等优点广泛应用于建筑行业。塔式起重机可以包括固定式塔式起重机和行走式塔式起重机,行走式塔式起重机可以包括轮胎式塔式起重机和履带式塔式起重机。塔式起重机一般可以包括塔身和上装。上装可以包括起重臂和平衡臂,起重臂用于起吊吊装物,平衡臂用于配重以起到平衡起重臂力矩的作用。在一些大型行走式塔机应用中(例如应用于核电、桥梁、风机安装等场景),整机重量大,塔身高,这就要求行走式塔机在行走过程中将重心保持在塔机中心位置,路面一些很小的不平整可能对这类行走式塔机的行走安全带来较大影响。
技术实现要素:
3.本技术实施例的目的是提供一种用于行走式塔机的检测装置以及行走式塔机,能够在行走式塔机在行走过程中提供更精确的检测数据。
4.为了实现上述目的,本技术第一方面提供用于行走式塔机的检测装置,行走式塔机包括底架和设置在底架上的塔身,检测装置包括:
5.倾角传感器,设置在底架上,用于检测底架相对于参考水平面的倾角;
6.塔身垂直度检测设备,包括:
7.rtk基准站,用于提供修正数据,修正数据包括rtk基准站的卫星定位数据和自身位置信息;
8.第一rtk移动测量端,设置在塔身顶部,用于根据卫星定位数据和修正数据确定第一rtk移动测量端的第一位置信息;
9.第二rtk移动测量端,设置在塔身底部,用于根据卫星定位数据和修正数据确定第二rtk移动测量端的第二位置信息;
10.处理器,用于根据第一位置信息和第二位置信息确定塔身的垂直度,垂直度和倾角传感器检测的倾角用于相互校准。
11.在本技术实施例中,第一rtk移动测量端设置在塔身顶部的中心位置,以及第二rtk移动测量端设置在塔身底部的中心位置。
12.在本技术实施例中,第一rtk移动测量端设置在塔身顶部的中心位置,以及第二rtk移动测量端包括分别设置在塔身底座处的四个支腿中的至少三个支腿处的rtk移动测量端。
13.在本技术实施例中,第二rtk移动测量端包括分别设置在塔身底座处的四个支腿处的四个rtk移动测量端。
14.在本技术实施例中,倾角传感器包括:
15.第一倾角传感器,用于检测底架沿行走式塔机的行进方向的纵倾角;以及
16.第二倾角传感器,用于检测底架沿行进方向的水平垂直方向的横倾角。
17.在本技术实施例中,倾角传感器为双轴倾角传感器,用于检测底架沿行走式塔机的行进方向的纵倾角以及底架沿行进方向的水平垂直方向的横倾角。
18.在本技术实施例中,塔身垂直度检测设备还包括转发服务器,与rtk基准站、第一rtk移动测量端以及第二rtk移动测量端通信连接,用于转发rtk基准站的修正数据。
19.本技术第二方面提供一种行走式塔机,包括:
20.底架;
21.塔身,设置在底架上;以及
22.上述的用于行走式塔机的检测装置。
23.在本技术实施例中,行走式塔机包括履带式塔机。
24.通过上述技术方案,可以提高对大型行走式塔机的底架倾角的检测准确度,并可以实现塔身垂直度与底架倾角的相互校准。
25.本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
26.附图是用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本技术实施例,但并不构成对本技术实施例的限制。在附图中:
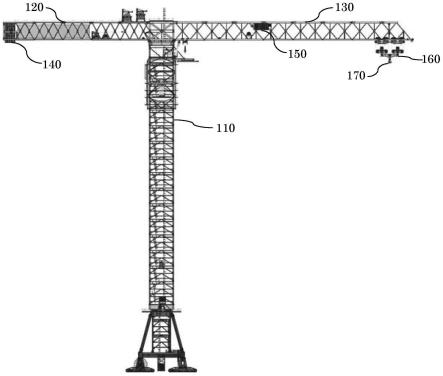
27.图1示意性示出了根据本技术实施例的行走式塔机的结构示意图;
28.图2示意性示出了图1示出的行走式塔机的底架及行走机构;
29.图3示意性示出了根据本技术实施例的用于行走式塔机的检测装置的结构框图;
30.图4示意性示出了根据本技术实施例的塔身垂直度检测设备314的安装位置布局图。
具体实施方式
31.以下结合附图对本技术实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本技术实施例,并不用于限制本技术实施例。
32.需要说明,若本技术实施方式中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
33.另外,若本技术实施方式中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施方式之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
34.图1示意性示出了根据本技术实施例的行走式塔机的结构示意图,其中可以应用根据本技术实施例的用于行走式塔机的调平方法。行走式塔机可以包括轨道式塔机和履带
式塔机等。如图1所示,在本技术实施例中,塔机可以包括塔身110和上装,上装可以与塔身110铰接,可以围绕塔身110(例如塔身的回转机构)转动。上装可以包括平衡臂120、起重臂130、固定平衡重140以及移动平衡重150。固定平衡重140可以固定在平衡臂侧,例如可以固定在平衡臂120的远端处(即,远离塔机回转中心)。上装可以设置有从平衡臂侧延伸至起重臂侧的导轨(图中未示出),移动平衡重150能够沿导轨移动。起重臂130上可以设置有变幅小车160以及供变幅小车160移动(变幅)的滑轨,变幅小车160可以通过吊绳与吊钩170连接。
35.图2示意性示出了图1示出的行走式塔机的底架及行走机构。如图2所示,行走式塔机还可以包括底架以及设置在底架下面的行走机构。塔身设置在底架上,行走机构可以包括至少左前履带组、右前履带组、左后履带组以及右后履带组。虽然图2中仅示出了四个履带组,但是本领域技术人员可以理解,可以根据需要设置更多个履带组,例如6个、8个等。每一个履带组可包含一个或多个履带,例如可包含左右履带。图中仅以附图标记210标示了一履带组,该履带组含左履带211和右履带212。
36.底架与行走机构之间可以设置有调平机构230,调平机构230可以用于连接行走机构与底架并可以给予底架支撑力。如图2所示,调平机构230可以包括至少设置在左前履带组与底架之间的左前调平支腿油缸机构,设置在右前履带组与底架之间的右前调平支腿油缸机构,设置在左后履带组与底架之间的左后调平支腿油缸机构以及设置在右后履带组与底架之间的右后调平支腿油缸机构。每个调平支腿油缸机构可以包括调平支腿油缸,调平支腿油缸机构的上部固定于底架,且调平支腿油缸的缸体的底部固定于各自履带组的车架。调平机构230还可以包括用于驱动调平支腿油缸的油缸活塞杆进行伸缩运动的液压驱动系统(图中未示出)。例如,每个调平支腿油缸可以配置有一个液压驱动系统,多个液压驱动系统可以由一个或多个控制器来控制。
37.图3示意性示出了根据本技术实施例的用于行走式塔机的检测装置的结构框图。如图3所示,该检测装置可以包括:
38.倾角传感器312,设置在底架上,用于检测底架相对于参考水平面的倾角;
39.塔身垂直度检测设备314,包括:
40.rtk基准站,用于提供修正数据,修正数据包括rtk基准站的卫星定位数据和自身位置信息;
41.第一rtk移动测量端,设置在塔身顶部,用于根据卫星定位数据和修正数据确定第一rtk移动测量端的第一位置信息;
42.第二rtk移动测量端,设置在塔身底部,用于根据卫星定位数据和修正数据确定第二rtk移动测量端的第二位置信息;
43.处理器,用于根据第一位置信息和第二位置信息确定塔身的垂直度,垂直度和倾角传感器检测的倾角用于相互校准。
44.具体地,在本技术实施例中,倾角传感器312可以包括第一倾角传感器和第二倾角传感器,第一倾角传感器可以用于检测底架在行走式塔机的行进方向相对于参考水平面的第一倾角(纵倾角),第二倾角传感器可以用于检测底架在行进方向的水平垂直方向(即,与参考水平面平行且与行进方向垂直,即横向)相对于参考水平面的第二倾角(横倾角)。可替换地,倾角传感器312可以是一个或多个双轴倾角传感器,每个双轴倾角传感器可以用于检
测纵倾角和横倾角。参考水平面可以例如是水平面。
45.处理器的示例可以包括但不限于,单片机、微处理器、可编程逻辑控制器(programmable logic controller,plc)、数字信号处理器(digital signal processing,dsp),场可编程门阵列(field programmable gate array,fpga)等
46.塔身垂直度检测设备314可以是基于实时动态载波相位差分(real-time kinematic,rtk)定位技术。
47.在一个示例中,塔身垂直度检测设备314可以包括多个基于rtk的移动测量端(例如gps定位器、北斗定位器),其可以包含卫星定位芯片,可以根据接收的卫星信号确定自身的位置。例如,塔身垂直度检测设备314可以包括第一rtk移动测量端,设置在塔身顶部的中心位置,以及第二rtk移动测量端,设置在塔身底部的中心位置。在一个示例中,第一rtk移动测量端可以包括一个或多个移动测量端,其可以设置在塔身顶部(例如顶部中心位置)。第二rtk移动测量端可以包括一个或多个移动测量端,可以设置在塔身底部(例如,底架中心位置或下回转中心位置)。移动测量端的通信链路可以采用例如4g、5g链路等。rtk基准站可以将修正数据发送至移动测量端(例如可以通过转发服务器转发)。该修正数据可以包括rtk基准站的卫星定位数据和自身位置信息(位置坐标信息)。移动测量端可以根据自身的卫星定位信息和修正数据确定自身的位置。然后根据位于塔身顶部的移动测量端确定的位置(例如位置坐标)和位于塔身底部的移动测量端确定的位置(例如位置坐标)来确定塔身的垂直度。
48.图4示意性示出了根据本技术实施例的塔身垂直度检测设备314的安装位置布局图。如图4所示,在该实施例中,可以在塔身顶部中心位置(a点)安装第一rtk移动测量端,可以在塔身底部中心位置(b点)安装第二rtk移动测量端。第一rtk移动测量端可以测得a点的位置坐标,记为a(x1,y1,z1),第二rtk移动测量端可以测得b点的位置坐标,记为b(x2,y2,z2),根据a点位置坐标和b点位置坐标可以计算出以下数据:
49.(1)塔机高度:h=z
1-z2,可实现增加标准节后高度自动标定;
50.(2)垂直度i:
51.例如,处理器在获取这些位置坐标后可以计算这些数据。
52.在较佳实施例中,鉴于塔身为钢架结构,在b点放置第二rtk移动测量端可能由于塔身干扰会出现信号不准确的问题,因此可以将第二rtk移动测量端布置在塔身底部周围。在一个示例中,第一rtk移动测量端可以设置在塔身顶部的中心位置,第二rtk移动测量端可以包括分别设置在塔身底座处的四个支腿中的至少三个支腿处的rtk移动测量端。通过至少三个第二rtk移动测量端确定的位置坐标确定一个圆面,该圆面的圆心位置坐标可以是所需的b点位置坐标。进一步地,第二rtk移动测量端可以包括分别设置在塔身底座处的四个支腿处的四个rtk移动测量端。由于四个支腿是对称结构,可以分别获取四个支腿的位置和高度数据,可以利用这四个点的高度差计算出四个点构成的平面的水平倾角,再根据该水平倾角和四个点的位置可以确定b点(即该四个点构成的四边形的中心点)。
53.在本技术实施例中,塔身垂直度检测设备还包括转发服务器,与rtk基准站、第一rtk移动测量端以及第二rtk移动测量端通信连接,用于转发rtk基准站的修正数据。另外,转发服务器可以接收移动测量端根据卫星定位数据确定的位置信息,并将位置信息和修正
数据一并发送到其他处理设备进行处理或自身就可以处理,以计算移动测量端的位置坐标,且可选地可以计算塔身垂直度。
54.在本技术实施例中,可以将得到的垂直度与倾角传感器检测到的倾角相互校准。例如,以行进方向为例,假定得到的垂直度为a%,倾角传感器检测的纵倾角为θ,理想情况下则有θ=arctan(a%)。如果这两者不一致,则可以根据偏差值θ-arctan(a%)的大小来确定倾角传感器检测的纵倾角的精度是否达到要求。反之,也可以使用倾角传感器检测的倾角来校核塔身垂直度。
55.在本技术实施例中,还可以使用得到的塔身垂直度来校准倾角传感器(例如双轴倾角传感器)检测的倾角。例如,可以调整底架,使得塔身垂直度检测设备314测得的垂直度最小时,将倾角传感器312调整为零位(水平位)。在塔机行走时,可以使用测得的垂直度与倾角传感器检测的倾角进行适时校准比对,防止塔机垂直度超限,确保塔机行走安全。
56.在本技术实施例中,提供一种行走式塔机,可以包括:
57.底架;
58.塔身,设置在底架上;以及
59.上述任意实施例的用于行走式塔机的检测装置。
60.行走式塔机可以包括轨道式塔机和履带式塔机等。在本技术实施例中,行走式塔机可以是履带式塔机。
61.通过本技术上述实施例的技术方案,可以提高对大型行走式塔机的底架倾角的检测准确度,并可以实现塔身垂直度与底架倾角的相互校准,以为底架调平提供更为准确的检测数据。
62.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
63.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。