1.本发明涉及一种无人艇路径跟踪方法及电子设备,特别是涉及一种基于改进视线法和切换控制的无人艇路径跟踪方法,涉及无人艇路径跟踪控制领域。
技术背景
2.无人艇路径跟踪是指无人艇按照计划的路线航行,是无人艇的一项基本功能,路径跟踪的精度直接影响到自主任务的执行效果。由于无人艇系统本身具有非线性、不确定性的特点,很难建立精确的数学模型,因此在路径跟踪工程实践中最常使用的是pid控制法。然而无人艇在航行过程中易受到时变的风、浪、流等环境干扰,产生一个横漂角,基于传统视线法和pid法的路径跟踪精度会下降。当无人艇的航速等状态发生变化时,如果不对控制器参数进行重新整定,也会使控制性能变差。为了保证无人艇路径跟踪精度,需要提高制导与控制方法对复杂环境和航速大范围变化的适应性。
3.针对这一问题,姜权权等提出的《一种高抗扰自适应路径跟随方法及系统》,公开号为cn108415423a,将跟踪误差引入到视线法制导律收敛圆半径和视线角解算中,同时结合mfac航向控制算法,消除了水流干扰和模型摄动等不确定因素给路径跟踪带来的影响,但没有考虑航速大范围变化情况下的控制器效果与适应性。张山贾等人提出的《一种抗浪节能的无人艇路径跟踪方法》,公开号为cn108227715a,该方法在视线法制导律期望航向角的计算中引入了时变漂角补偿,增加了一个波浪观测模块和和一个模糊推理模块,对于导航、视觉检测设备和算法要求较高,实现起来较为复杂。
技术实现要素:
4.本发明的目的在于克服现有技术的上述不足,提供一种无人艇路径跟踪方法及电子设备,对传统视线法进行改进,将跟踪误差、跟踪误差变化率与航速引入视线法制导律,解决无人艇在外界环境干扰下产生横漂角,导致路径跟踪精度下降的问题,同时改善调整过程的震荡幅度与次数,提高无人艇转弯过程中的跟踪精度和安全性。
5.本发明的上述目的主要是通过如下技术方案予以实现的:
6.一种无人艇路径跟踪方法,包括:
7.s1、设n个航路点pi组成期望路径,i∈n,n≥2,相邻两个航路点pi、p
i 1
组成一个航路段,pi为当前航路段起点,p
i 1
为当前航路段终点;
8.s2、判断是否满足:若无人艇当前位置p与航路点p
i 1
之间距离pp
i 1
≥γ,则进入步骤s3,若pp
i 1
<γ且未到达最后一个航路点pn,则切换到下一航路段,进入步骤s3,若pp
i 1
<γ且到达最后一个航路点pn,进入步骤s9,其中γ为航路段更新距离常值;
9.s3、计算无人艇当前航路段pip
i 1
的航迹误差ed(k);
10.s4、计算无人艇虚拟目标点的前视距离δ;
11.s5、根据所述航迹误差ed(k)和所述前视距离δ,计算期望航向角ψd;
12.s6、根据无人艇的艏向角ψ和所述期望航向角ψd,计算艏向角误差e
ψ
(k),其中:e
ψ
(k)=ψ
d-ψ;
13.s7、获取速度误差ev(k),根据所述速度误差ev(k)得到油门指令,通过控制油门开度实现无人艇速度控制;
14.s8、根据所述艏向角误差e
ψ
(k)得到舵角指令,通过调整艏向角实现无人艇航迹跟踪,返回步骤s2;
15.s9、结束。
16.在上述无人艇路径跟踪方法中,所述步骤s3中计算无人艇当前航路段pip
i 1
的航迹误差ed(k)包括:
17.无人艇的航迹误差ed(k)为当前位置p(x
p
,y
p
)到航路段pip
i 1
所在直线的垂直距离,在计划航线的左侧为正,右侧为负,计算公式如下:
[0018][0019]
其中:ψ
ab
为航路段pip
i 1
与北东坐标系中x轴的夹角,ψ
ap
为航路点pi与无人艇当前位置p(x
p
,y
p
)的连线与北东坐标系中x轴的夹角;(xa,ya)为当前航路段起点pi的坐标。
[0020]
在上述无人艇路径跟踪方法中,所述步骤s4中计算无人艇虚拟目标点的前视距离δ包括:
[0021]
求解无人艇当前位置p(x
p
,y
p
)到航路段pip
i 1
所在直线的垂线与pip
i 1
所在直线的交点坐标q(xq,yq),判断点q的位置,若q在航路段pip
i 1
上,则λ=1,若q在航路段pip
i 1
外,则λ=0,具体计算公式如下:
[0022][0023]
其中:v为无人艇当前航速,δ为前视距离,即虚拟目标点与无人艇在当前航路段上垂直投影点的距离,δ
max
,δ
min
为前视距离的最大值、最小值,σ为调整因子,为常值;qpi为点q到航路点pi的距离,qp
i 1
为点q到航路点p
i 1
的距离,(xb,yb)为当前航路段终点p
i 1
的坐标。
[0024]
在上述无人艇路径跟踪方法中,所述步骤s5中根据所述航迹误差ed(k)和所述前视距离δ计算期望航向角ψd包括:
[0025][0026]
其中,ηi(k)为运行到第k个周期的航迹误差积分项,为积分项系数,为正实数,ηi(k)的计算公式如下
[0027][0028]
ηi(k-1)为运行到第k-1个周期的航迹误差积分项,t为采样周期,η
max
为航迹误差积分上限,系数β与ed(k)的关系为
[0029][0030]
其中为航迹跟踪误差的导数,ε1、ε2为正实数。
[0031]
在上述无人艇路径跟踪方法中,所述步骤s7中获取速度误差ev(k)包括:
[0032]
设计无人艇速度限制v
dmax
,
[0033]
上位机设定无人艇期望速度vc,
[0034]
根据所述v
dmax
和vc获得速度控制器的输入期望速度vd,vd为取v
dmax
和vc的最小值,即:vd=min(vc,v
dmax
);
[0035]
速度误差ev(k)通过如下公式获得:
[0036]
ev(k)=v
d-v
[0037]
其中:v为无人艇当前航速。
[0038]
在上述无人艇路径跟踪方法中,所述无人艇速度限制v
dmax
计算公式如下:
[0039][0040]
l=min(ppi,pp
i 1
)
[0041]
其中,v
max
、v
min
为速度限制的最大值、最小值,l是无人艇与最近的转向点间的距离;ppi为无人艇当前位置p与航路点pi之间距离,pp
i 1
为无人艇当前位置p与航路点p
i 1
之间距离;tanh()为双取正切函数;κv为常值系数。
[0042]
在上述无人艇路径跟踪方法中,所述s8中根据艏向角误差e
ψ
(k)得到舵角指令包括:
[0043]
计算不同工作航速下的最优控制器参数k
pq
、k
dq
、k
iq
;
[0044]
获得所述最优控制器参数k
pq
、k
dq
、k
iq
在不同工作航速下的每一个参数对应的权重wq;
[0045]
根据所述参数k
pq
、k
dq
、k
iq
和权重wq计算得到舵角指令δ(k)。
[0046]
在上述无人艇路径跟踪方法中,所述计算不同工况下的最优控制器参数k
pq
、k
dq
、k
iq
包括:
[0047]
(1)、选取m个典型工作航速,在无人艇每个典型工作航速下分别整定一组pid参数,设计m个pid子控制器,子控制器的形式如下,其中m》1;
[0048][0049]
(3)、利用差分进化算法对子控制器参数k
pq
、k
dq
、k
iq
进行离线优化,具体步骤为:
[0050]
(2.1)确定每个参数的范围;
[0051]
(2.2)随机产生m个个体构成初始种群,每个个体由n维向量组成;
[0052]
(2.3)将种群中各个体解码成对应的参数值,用此参数求代价函数值j;
[0053]
(2.4)利用差分进化算子对当前种群进行变异、交叉、选择操作,产生下一代种群;
[0054]
(2.5)重复步骤(2.3)和(2.4),直至达到最大进化代数。
[0055]
在上述无人艇路径跟踪方法中,获得所述最优控制器参数k
pq
、k
dq
、k
iq
在不同工作航速下的每一个参数对应的权重wq包括:
[0056]
子控制器切换采用基于高木—关野takagi-sugeno模型的模糊推理方法,将无人艇当前航速v作为模糊切换规则的输入,将无人艇当前航速v模糊分割为模糊集{v1,v2,...,vm},v的隶属度函数采用梯形隶属函数,计算得到权重wq。
[0057]
在上述无人艇路径跟踪方法中,根据所述参数k
pq
、k
dq
、k
iq
和权重wq计算得到舵角指令δ(k)包括:
[0058]
由加权平均法求得pid控制器参数,进而得到控制器总的输出为:
[0059][0060]
其中:wq=μ
vq
(v)表示第q条规则的权重,μ
vq
(v)为对语言变量值模糊集合vq的隶属度函数;t为控制周期;e
ψ
(k)为第k个周期的艏向角误差,e
ψ
(k-1)为第k-1个周期的艏向角误差。
[0061]
一种电子设备,包括存储器及处理器:
[0062]
所述存储器用于存储一条或多条计算机指令;
[0063]
所述处理器用于执行所述一条或多条计算机指令,以用于:
[0064]
s1、设n个航路点pi组成期望路径,i∈n,n≥2,相邻两个航路点pi、p
i 1
组成一个航路段,,pi为当前航路段起点,p
i 1
为当前航路段终点;
[0065]
s2、判断是否满足:若无人艇当前位置p与航路点p
i 1
之间距离pp
i 1
≥γ,则直接进入步骤s3,若pp
i 1
<γ且未到达最后一个航路点pn,则切换到下一航路段,进入步骤s3,若pp
i 1
<γ且到达最后一个航路点pn,进入步骤s9,其中γ为航路段更新距离常值;
[0066]
s3、计算无人艇当前航路段pip
i 1
的航迹误差ed(k);
[0067]
s4、计算无人艇虚拟目标点的前视距离δ;
[0068]
s5、根据所述航迹误差ed(k)和所述前视距离δ,计算期望航向角ψd;
[0069]
s6、根据无人艇的艏向角ψ和所述期望航向角ψd,计算艏向角误差e
ψ
(k),其中:e
ψ
(k)=ψ
d-ψ;
[0070]
s7、获取速度误差ev(k),根据所述速度误差ev(k)得到油门指令,通过控制油门开度实现无人艇速度控制;
[0071]
s8、根据所述艏向角误差e
ψ
(k)得到舵角指令,通过调整艏向角实现无人艇航迹跟踪,返回步骤s2;
[0072]
s9、结束。
[0073]
本发明与现有技术相比至少包含如下有益效果:
[0074]
(1)本发明对传统视线法进行改进,将跟踪误差、跟踪误差变化率与速度引入视线法制导律,解决无人艇在外界环境干扰下产生横漂角,导致路径跟踪精度下降的问题,同时改善调整过程的震荡幅度与次数。
[0075]
(2)本发明在路径跟踪过程中引入速度限制,提高无人艇转弯过程中的跟踪精度和安全性。
[0076]
(3)本发明通过控制器采用基于t-s模糊模型的多pid切换控制,利用差分进化算法在无人艇各个典型工作航速下分别整定出一组最优pid参数,使无人艇航速大范围变化时,多控制器能够平滑切换,保证在各典型工作航速下具有更好的跟踪控制性能;
[0077]
(4)本发明采用差分进化对pid三个参数进行整定,在不需要给出调节器初始参数的情况下,仍能寻找到合适的参数;相比于遗传算法等其他进化算法,差分进化算法收敛速度快,比较稳定,反复运算能收敛到同一个解。
附图说明
[0078]
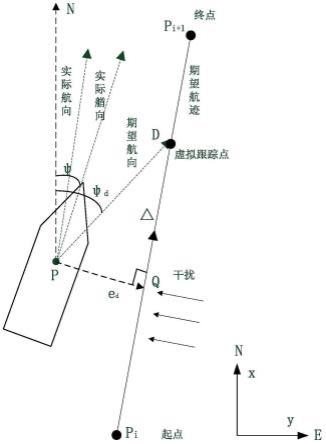
图1为本发明视线制导法和平面坐标示意图;
[0079]
图2为本发明多pid切换控制器结构图;
[0080]
图3为本发明基于差分进化的pid参数离线优化基本运算流程;
[0081]
图4为本发明模糊切换器输入v的隶属度函数示意图。
具体实施方式
[0082]
下面结合附图和具体实施例对本发明作进一步详细的描述:
[0083]
本发明提供一种基于改进视线法和切换控制的无人艇路径跟踪方法,具体的实施步骤为:
[0084]
步骤1:设n个航路点pi组成期望路径,i∈n,n≥2,相邻两个航路点pi、p
i 1
组成一个航路段,pi为当前航路段起点,p
i 1
为当前航路段终点;
[0085]
一可选实施例中,设定由n个航路点pn,n=0,1,...,n(n≥2)组成的期望路径,将航路点和无人艇位置的经纬度全部转换到北东坐标系中,x轴指向正北方向,y轴指向正东方向,将无人艇运动与控制问题简化成一种北东坐标系下的平面运动控制问题。例如将无人艇当前位置p作为第一个航路点p0,则此时路径中包含n 1个航路点,分别是pn,n=0,1,...,n(n≥2),将当前航路段起点pi初始化为p0,当前航路段终点p
i 1
初始化为p1。pn在北东坐标系下的坐标表示为(xn,yn)。
[0086]
步骤2:根据无人艇当前位置p与当前航路段终点p
i 1
的距离判断是否需要更新航路段,判断是否满足:若无人艇当前位置p与航路点p
i 1
之间距离pp
i 1
≥γ,则直接进入步骤3,若pp
i 1
<γ且未到达最后一个航路点pn,则切换到下一航路段,进入步骤3,若pp
i 1
<γ且到达最后一个航路点pn,进入步骤9,其中γ为航路段更新距离常值,γ根据工作航速下的转弯半径等参数选取一个适当的正实数;
[0087]
步骤3:计算当前航路段pip
i 1
与x轴的夹角,即该航路段的计划航向ψ
ab
,计算当前航路段pip
i 1
与x轴夹角的反方向ψ
ba
,ψ
ab
、ψ
ba
计算公式如下:
[0088][0089][0090]
计算航路段起点pi与无人艇位置p(x
p
,y
p
)的连线与x轴的夹角:
[0091][0092]
进而可以得到当前的航迹误差ed(k),无人艇的航迹误差是当前位置pi到直线pip
i 1
的垂直距离,在计划航线的左侧为正,右侧为负,计算公式如下:
[0093][0094]
其中:(xa,ya)为当前航路段起点pi的坐标。
[0095]
步骤4:los视线制导法是在航路段上虚拟出一个追踪目标,然后引导无人艇沿着到追踪目标的视线方向航行。本发明中虚拟追踪目标确定方法为超前置位法(lookahead-based)。超前置位法中的虚拟目标与无人艇在航路段上的垂直投影点的距离δ为一个变化的实数。首先通过几何方法求出当前无人艇位置p(x
p
,y
p
)到航路段pip
i 1
所在直线的垂直投影点q(xq,yq)坐标,q点位置如图1所示。判断点q的位置,若点q在线段pip
i 1
上,则λ=1,若q在线段pip
i 1
外,则λ=0。根据点q的位置确定虚拟目标点位置,若q在线段pip
i 1
外,且q点离pi点较近,则虚拟目标点取pi点;若点q在线段pip
i 1
外,且q点离p
i 1
点较近,则虚拟目标点取p
i 1
点;若q点在线段pip
i 1
上,则前视距离δ根据速度而变化,视线法中虚拟目标点的前视距离δ的计算方法如下:
[0096][0097]
其中:v为无人艇当前航速,δ为前视距离,即虚拟目标点与无人艇在当前航路段上垂直投影点的距离,δ
max
,δ
min
为前视距离的最大值、最小值,σ为调整因子,为常值;qpi为点q到航路点pi的距离,qp
i 1
为点q到航路点p
i 1
的距离。
[0098]
步骤5:利用步骤3求得的航迹误差ed(k)和步骤4求得的前视距离δ,计算期望航向角ψd。在期望航向角的计算中引入航迹误差积分项,根据航迹误差、航迹误差变化率的大小、符号,确定是否需要累加航迹误差积分项,并设置积分上限。期望航向角ψd计算方法如下:
[0099]
[0100]
其中,ηi(k)为运行到第k个周期的航迹误差积分项,为积分项系数,为正实数,ηi(k)的计算公式如下
[0101][0102]
ηi(k-1)为运行到第k-1个周期的航迹误差积分项,t为采样周期,η
max
为航迹误差积分上限,系数β与ed(k)的关系为
[0103][0104]
其中为航迹跟踪误差的导数,ε1、ε2为正实数。
[0105]
步骤6:读取导航信息融合模块输出的无人艇艏向角ψ,根据无人艇的艏向角ψ和所述期望航向角ψd,计算艏向角误差e
ψ
(k),其中:
[0106]eψ
(k)=ψ
d-ψ。
[0107]
步骤7:计算航迹跟踪过程中的速度限制。给无人艇设计一个速度限制v
dmax
,v
dmax
随无人艇与距转向点距离的减小而减小,从而避免无人艇高速转弯,v
dmax
计算公式如下:
[0108][0109]
l=min(ppi,pp
i 1
)
[0110]
其中,v
max
、v
min
为速度限制的最大值、最小值,l是无人艇与最近的转向点间的距离;ppi为无人艇当前位置p与航路点pi之间距离,pp
i 1
为无人艇当前位置p与航路点p
i 1
之间距离;tanh()为双取正切函数;κv为常值系数。
[0111]
于是可以得到速度控制器的输入期望速度vd:
[0112]vd
=min(vc,v
dmax
)
[0113]
其中vc为上位机设定的期望速度,取上位机设定的期望速度vc和速度限制v
dmax
的最小值为速度控制器的参考输入,该参考输入随着距离每一个转向点距离的改变而平滑变化。
[0114]
读取导航信息融合模块输出的无人艇速度值v,计算速度误差
[0115]
ev(k)=v
d-v
[0116]
利用求得的速度误差ev(k)设计速度控制器,得到油门指令,通过对油门开度的调整实现无人艇速度控制。
[0117]
步骤8:利用步骤6求得的艏向角误差e
ψ
(k)设计艏向控制器,得到舵角指令,通过对艏向角的调整达到航迹跟踪的效果。首先计算不同工作航速下的最优控制器参数k
pq
、k
dq
、k
iq
;获得所述最优控制器参数k
pq
、k
dq
、k
iq
在不同工作航速下的每一个参数对应的权重wq;根据所述参数k
pq
、k
dq
、k
iq
和权重wq计算得到舵角指令δ(k)。
[0118]
无人艇因航速、载重等因素的变化会使其运动数学模型产生摄动,对于一些工作时航速大范围变化,系统特性变化较大,模型摄动影响明显的无人艇,基于定常数学模型或在某一特定工况下设计的控制器,在远离设计工作点时,控制效果将明显变差,无法满足性能要求。本发明使用模糊加权方法来设计航速变化过程的pid控制器参数,根据无人艇航速
状态信息,采用基于高木—关野(takagi-sugeno)模型的模糊推理方法,得到当前无人艇状态接近某一典型工作航速的程度,计算得到权重系数,加权不同工况的控制器参数来设计切换控制器,弥补了单一的pid控制适用范围受限的不足,避免了常规切换逻辑中控制量的突变,实现了多控制器的平滑切换,使无人艇在各典型工作航速下都能获得较好的控制效果。
[0119]
如图2所示为本发明多pid切换控制器结构图。首先,描述无人艇工作状态的参数为航速,利用差分进化算法在无人艇三个典型工作航速下(分别是低速、中速、高速)分别整定出一组pid参数,设计三个pid子控制器,使各个子控制器在工作点具有良好的控制效果,在工作点附近也有一定的控制效果,满足性能要求,子控制器的形式如下:
[0120][0121]
一可选实施例中,利用差分进化算法对子控制器参数k
pq
、k
dq
、k
iq
进行离线优化,如图3所示为本发明基于差分进化的pid参数离线优化基本运算流程,具体步骤为:
[0122]
(1)确定每个参数的大致范围,本例中k
p
的取值范围为[0,20],kd的取值范围为[0,20],不加入积分项;
[0123]
(2)随机产生m个个体构成初始种群,每个个体由n维向量组成
[0124]
xi(0)=(x
i1
(0),x
i2
(0),x
i3
(0),...,x
in
(0)),i=1,2,3,...,m
[0125]
取值方式如下:
[0126][0127]
式中,x
ij
(0)表示种群中第0代的第i条“染色体”(或个体)的第j个“基因”,和分别为第i个染色体第j个基因的上界和下界,rand
ij
(0,1)为[0,1]之间的随机小数,本例中种群规模m=50,n=2;
[0128]
(3)将种群中各个体解码成对应的参数值,用此参数求代价函数值j,综合考虑优化过渡过程动态特性和防止控制能量过大两个方面,代价函数采用误差绝对值与控制输入平方项的加权和的时间积分作为参数选择的最小目标函数,指标函数如下:
[0129][0130]
式中,e(t)为系统误差,u(t)为控制器输出,w1和w2为权值,本实施例中w1=0.99,w2=0.01;
[0131]
(4)利用差分进化算子对当前种群进行变异、交叉、选择操作,产生下一代种群,具体方法为:
[0132]
①
变异操作
[0133]
从群体中随机选择3个个体x
p1
、x
p2
、x
p3
,且i≠p1≠p2≠p3,则变异操作
[0134]
为
[0135]hij
(t 1)=x
p1j
(t) f(x
p2j
(t)-x
p3j
(t))
[0136]
式中,f为缩放因子,本例中取f=1.5,x
p2j
(t)-x
p3j
(t)为差异化向量,
[0137]
p1、p2、p3为随机整数,表示个体在种群中的序号。在进化过程中,为了保证解的有效性,必须对“染色体”(个体)中各“基因”进行边界检查,如果不满足边界条件,则“基因”用
随机方法重新生成;
[0138]
②
交叉操作
[0139]
对第t代种群{xi(t)},及其变异的中间体{hi(t 1)}进行个体间的交叉操作,具体操作如下:
[0140][0141]
式中,randl
ij
为[0,1]之间的随机小数,cr为交叉概率,cr∈[0,1],本例中cr=0.6;
[0142]
③
选择操作
[0143]
试验向量vi(t 1)和目标向量xi(t)对指标函数进行比较,选择进入下一代种群的个体:
[0144][0145]
(5)重复步骤(3)和(4),直至达到最大进化代数。
[0146]
子控制器切换采用基于高木—关野(takagi-sugeno)模型的模糊推理方法,将航速v作为模糊切换规则的输入,将速度v模糊分割为模糊集{v1,v2,...,vm},v的隶属度函数采用梯形隶属函数,计算得到权重,pid控制器参数k
p
,kd,ki作为模糊切换器的输出,可得模糊规则为:
[0147]rq
:if v is vq then k
p
=k
pq
,kd=k
dq
,ki=k
iq
,q=1,2,...,m
[0148]
一可选实施例中,将航速v作为模糊切换规则的输入,v的取值范围是[0,35],则要求的论域为[0,35]。将速度v模糊分割为模糊集{vs,vm,vb},该模糊集合的元素分别代表低速、中速、高速,v的隶属度函数采用梯形隶属函数,隶属函数曲线如图4所示。其对应的表达式形式如下:
[0149][0150]
pid控制器参数k
p
,kd,ki作为模糊切换器的输出。本发明采用零阶t-s模糊规则,t-s型模糊推理系统采用了将模糊推理与去模糊化结合的运算操作,其模糊规则的后件部分将输出量表示为输入量的线性组合,具体规则为:
[0151]
r1:if v is vs then k
p
=k
p1
,kd=k
d1
,ki=k
i1
[0152]
r2:if v is vm then k
p
=k
p2
,kd=k
d2
,ki=k
i2
[0153]
r3:if v is vb then k
p
=k
p3
,kd=k
d3
,ki=k
i3
[0154]
系统包含m条规则,由加权平均法求得pid控制器参数,一可选实施例中,由加权平均法求得pid控制器参数,进而得到控制器总的输出为:
[0155][0156]
式中wq=μ
vq
(v)表示第q条规则的权重,μ
vq
(v)为对语言变量值模糊集合vq的隶属度函数,t为控制周期;e
ψ
(k)为第k个周期的艏向角误差,e
ψ
(k-1)为第k-1个周期的艏向角误差;表示从0时刻到k时刻的e
ψ
(k)t累加和。
[0157]
由上式可见其总的输出是各子控制器输出按照一定的权重进行求和。将控制器输出的舵角指令发送到转向执行机构,然后返回步骤2。
[0158]
步骤9:结束。
[0159]
本发明的目的是提高传统的视线法制导律与pid控制方法对复杂环境和航速大范围变化的适应性。对传统视线法进行改进,将跟踪误差、跟踪误差变化率与航速引入视线法制导律,解决无人艇在外界环境干扰下产生横漂角,导致路径跟踪精度下降的问题,同时改善调整过程的震荡幅度与次数。在路径跟踪过程中引入速度限制,提高无人艇转弯过程中的跟踪精度和安全性。控制器采用基于t-s模糊模型的多pid切换控制,利用差分进化算法在无人艇各个典型工作航速下分别整定出一组最优pid参数,使无人艇航速大范围变化时,多控制器能够平滑切换,保证在各典型工作航速下具有更好的跟踪控制性能。
[0160]
以上所述,仅为本发明最佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
[0161]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。