1.本发明涉及一种车辆、车辆避障方法及装置,属于智能汽车技术领域。
背景技术:
2.随着计算机及机器人技术的发展,自动驾驶车辆的研究取得了很大进展,并广泛应用于军事、科研、民用等各个领域。自动驾驶车辆行驶过程中,借助道路及周边障碍物信息,通过动态路径规划实现避障。针对结构化开放道路内运行的自动驾驶车辆,由于其场景复杂,安全性要求高,交规约束等特点,对车辆通行效率及安全性提高了更高要求。车辆避障作为安全高效通行的前提,是自动驾驶车辆自动化程度的重要体现。
3.目前的车辆避障方法在检测出车辆前方有障碍物且障碍物在本车道时,直接通过换道来实现避障,但是换道避障存在安全风险较高的问题,且目前的车辆避障方法进行换道避障时未提供相应的可行驶区域,换道时机无法合理确定,换道效率低。
技术实现要素:
4.本发明的目的在于提供一种车辆、车辆避障方法及装置,用以解决目前直接通过换道来实现避障安全风险较高的问题。
5.为实现上述目的,本发明提供了一种车辆避障方法,该方法包括以下步骤:
6.检测车辆前方的障碍物信息,所述障碍物信息包括障碍物的位置和障碍物占据车道的宽度;
7.当车辆前方有障碍物且障碍物在本车道时,判断跨车道避障的安全性是否满足要求;
8.当跨车道避障的安全性满足要求时,根据障碍物占据车道的宽度、车辆通行时与障碍物保持的最小安全距离、车道宽度和车辆宽度计算车辆跨车道避障所需的借道深度;
9.当所述借道深度小于借道阈值时进行借道避障,并根据障碍物占据车道的宽度、车辆通行时与障碍物保持的最小安全距离、车辆通行时与道路边界保持的最小安全距离、车道宽度和车辆宽度计算借道可行驶区域;否则进行换道避障,并根据车辆通行时与道路边界保持的最小安全距离、车道宽度和车辆宽度计算换道可行驶区域;
10.根据所述借道可行驶区域或者所述换道可行驶区域进行路径规划,完成避障。
11.本发明还提供了一种车辆避障装置,该装置包括障碍物信息检测装置、处理器和存储器,所述障碍物信息检测装置用于检测障碍物的位置和障碍物占据车道的宽度,并将检测到的障碍物信息发送给处理器,所述处理器执行由所述存储器存储的计算机程序,以实现上述的车辆避障方法。
12.本发明还提供了一种车辆,包括车辆本体和车辆避障装置,所述车辆避障装置包括障碍物信息检测装置、处理器和存储器,所述障碍物信息检测装置用于检测障碍物的位置和障碍物占据车道的宽度,并将检测到的障碍物信息发送给处理器,所述处理器执行由所述存储器存储的计算机程序,以实现上述的车辆避障方法。
13.本发明的有益效果:首先,车辆避障前先判断跨车道避障的安全性是否满足要求,只有在跨车道避障的安全性满足要求的前提下才进行避障,能够提高避障安全性;其次,车辆避障前先计算借道深度,根据借道深度的大小选择换道避障还是借道避障,能够避免不必要换道,减少换道次数,从而降低避障安全风险;最后,车辆避障前先计算出相应的可行驶区域,根据可行驶区域进行路径规划,能够更加准确的确定避障时机,提高车辆通行效率。
14.进一步地,在上述车辆、车辆避障方法及装置中,在道路属性允许跨道行驶的条件下,通过将自车虚拟至相邻车道,计算相邻车道上虚拟自车的滞后车辆的通行能力来判断跨车道避障的安全性是否满足要求;当滞后车辆的通行能力大于设定阈值时跨车道避障的安全性满足要求。
15.进一步地,在上述车辆、车辆避障方法及装置中,车辆通行能力的计算过程包括:在车辆可观测范围内根据车辆车速对道路进行栅格化处理,每个栅格分配设定的势场强度,并根据车辆车速和栅格离车辆的距离对每个栅格分配权重,越远离车辆的栅格权重越小;根据每个栅格内的障碍物信息以及栅格的势场强度和权重,计算车辆可观测范围内的道路势场,根据所述道路势场计算车辆通行能力。
16.进一步地,在上述车辆、车辆避障方法及装置中,所述道路势场的计算公式为:所述车辆通行能力的计算公式为:p0=exp(-u0),p0≤1.0;式中,u0为道路势场,w(i)为第i个栅格的权重,w(1)为第一个栅格的权重,i为栅格编号,a、b为栅格分配系数,a=﹣0.001*v/3.0 a0,b=﹣0.001*3/v b0,a0的取值范围为[1.0,2.0],b0的取值范围为[0.001,0.2],v为车辆车速,m为栅格总个数,σ(i)代表栅格内的障碍物信息,p0为车辆通行能力。
[0017]
进一步地,在上述车辆、车辆避障方法及装置中,所述借道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆通行时与道路边界保持的最小安全距离,ds为车辆通行时与障碍物保持的最小安全距离,dl为障碍物占据车道的宽度,所述借道可行驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正。
[0018]
进一步地,在上述车辆、车辆避障方法及装置中,所述换道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆通行时与道路边界保持的最小安全距离,所述换道可行驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正。
[0019]
进一步地,在上述车辆、车辆避障方法及装置中,当车辆前方无障碍物时或者当车辆前方有障碍物且障碍物在相邻车道时,车辆保持本车道行驶,此时本车道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆通行时与道路边界保持的最小安全距离,所述本车道可行
驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正。
附图说明
[0020]
图1是本发明方法实施例中的车辆避障方法流程图;
[0021]
图2是本发明方法实施例中保持当前车道行驶时的可行驶区域示意图;
[0022]
图3是本发明方法实施例中跨车道避障安全性确认示意图;
[0023]
图4是本发明方法实施例中道路栅格化示意图;
[0024]
图5是本发明方法实施例中栅格权重分配示意图;
[0025]
图6是本发明方法实施例中借道避障时的可行驶区域示意图;
[0026]
图7是本发明方法实施例中换道避障时的可行驶区域示意图;
[0027]
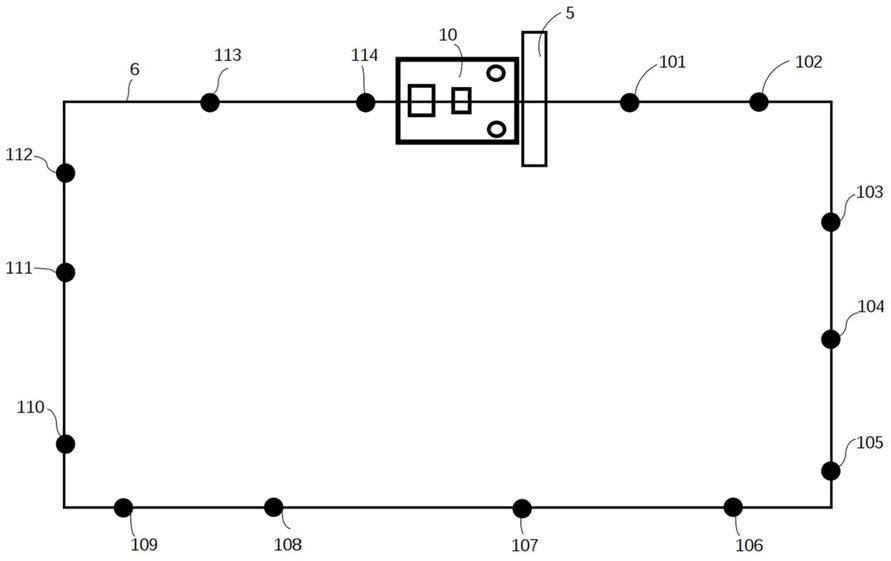
图8是本发明装置实施例中的车辆避障控制装置结构示意图。
具体实施方式
[0028]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
[0029]
方法实施例:
[0030]
如图1所示,本实施例的车辆避障方法包括以下步骤:
[0031]
(1)检测车辆前方的障碍物信息,障碍物信息包括障碍物的位置和障碍物占据车道的宽度;
[0032]
(2)当车辆前方无障碍物时或者当车辆前方有障碍物且障碍物在相邻车道时,为避免车辆侵入相邻车道对自车安全行驶产生影响,令车辆保持本车道行驶,此时本车道可行驶区域l0见图2,本车道可行驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正。
[0033]
本车道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆与道路边界保持的最小安全距离。
[0034]
(3)当车辆前方有障碍物且障碍物在本车道时,需要进行避障,为了完成避障自车可能会侵入相邻车道出现跨车道行驶的情况,因此首先要对跨车道避障的安全性进行确认,即判断跨车道避障的安全性是否满足要求;具体如下:
[0035]
首先,判断道路属性是否允许跨车道行驶,若不允许,则不满足跨车道避障安全性要求,禁止自车跨车道避障行驶,例如若跨道行驶会违反交通规则,则不满足避障安全性要求;
[0036]
若允许,则通过虚拟自车至相邻车道,利用车辆通行能力计算方法计算相邻车道上虚拟自车的滞后车辆的通行能力来评估自车跨车道避障的安全性。
[0037]
跨车道避障安全性确认示意图如图3所示,黑色框代表障碍物,将自车虚拟至相邻车道得到自车',此时自车'侧后方的车辆(简称滞后车辆,如紧跟在自车'后方的车辆)可视为自车'侧后方的障碍物,相对来讲,自车'可视为滞后车辆前进方向上的障碍物,则滞后车辆在其车道上的通行能力就能反映自车跨车道避障的安全性。
[0038]
滞后车辆在其车道上的通行能力pr为:pr=exp(-ur),其中pr≤1.0,当pr小于一定安全边界p(即设定阈值)时,说明不满足避障安全性要求,禁止自车跨车道避障行驶。
[0039]
其中,车辆通行能力计算方法如下:首先,在车辆可观测范围d内,根据自车车速对道路进行栅格化处理,见图4,每个栅格分配设定的势场强度j0,每个栅格长度为l,栅格总数量为m,其中,栅格长度l根据自车车速确定,l=min(max(l
min
,v*t),l
max
),l
min
为栅格的最小长度,l
max
为栅格的最大长度,v为自车车速,单位为m/s,t的取值范围为1s~2s;l
min
、l
max
和t的取值根据实际场景设置。
[0040]
考虑人类驾驶员在不同车速下对前方道路的关注程度存在差异,根据车辆车速和栅格离车辆的距离对每个栅格进行权重分配,栅格权重分配示意图见图5,越远离车辆的栅格权重越小。每个栅格权重w(i)为:
[0041][0042]
其中,w(1)为第一个栅格权重,i为栅格编号,a、b为栅格分配系数,栅格分配系数a、b根据车速计算,a=﹣0.001*v/3.0 a0,b=﹣0.001*3/v b0,a0的取值范围为[1.0,2.0],b0的取值范围为[0.001,0.2],a0、b0的取值可根据具体需要进行调整,v为车辆车速。
[0043]
根据每个栅格内的障碍物信息,对d范围内的道路势场u0进行计算:
[0044][0045]
其中,σ(i)为第i个栅格内障碍物占据状态,
[0046]
自车在当前道路的通行能力p0为:p0=exp(-u0),其中p0≤1.0。
[0047]
(4)当跨车道避障的安全性满足要求时,进行借道深度计算;
[0048]
具体地,根据障碍物占据车道的宽度dl、车辆通行时与障碍物保持的最小安全距离ds、车道宽度lanewidth和车辆宽度carwidth计算车辆跨车道避障所需的借道深度dt:dt=dl ds carwidth-lanewidth。
[0049]
(5)根据借道深度的大小选择相应的避障策略,根据选择的避障策略确定相应的可行驶区域;
[0050]
其中,当借道深度dt<借道阀值dq时,车辆只借用相邻车道的一部分就能实现避障,此时选择借道避障策略进行借道避障,以向左跨车道避障为例,借道避障策略对应的借道可行驶区域l0见图6,借道可行驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正;借道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆通行时与道路边界保持的最小安全距离,ds为车辆通行时与障碍物保持的最小安全距离,dl为障碍物占据车道的宽度。
[0051]
当借道深度dt≥借道阀值dq时,车辆直接将可行驶区域扩展为整个相邻车道,此时选择换道避障策略进行换道避障,以向左跨车道避障为例,换道避障策略对应的换道可
行驶区域l0见图7,换道可行驶区域为当前车辆所在车道的车道中心线两侧的范围,车道中心线左侧为负,右侧为正;换道可行驶区域为:心线左侧为负,右侧为正;换道可行驶区域为:其中,lanewidth为车道宽度,carwidth为车辆宽度,d0为车辆通行时与道路边界保持的最小安全距离。
[0052]
借道阈值dq的大小设置根据自车宽度和道路宽度确定,例如可以以自车侵入到相邻车道中心线距离时对应的侵入量作为dq值。
[0053]
(6)根据相应的可行驶区域进行路径规划,完成避障。
[0054]
需要说明的是,本实施例中的可行驶区域(包括本车道可行驶区域、换道可行驶区域和借道可行驶区域)是指进行路径规划前初步确定的候选路径范围,也就是说,本实施例方法先通过确定可行驶区域初步确定了候选路径的范围,之后的避障过程会根据各维度(包括候选路径的通过性、相似度、安全性等)对候选路径范围内的每条候选路径进行评估,根据评估结果选择最优路径行驶完成避障。
[0055]
装置实施例:
[0056]
如图8所示,本实施例的车辆避障装置包括障碍物信息检测装置(例如摄像头或雷达探测器等)、处理器和存储器,障碍物信息检测装置用于检测障碍物的位置和障碍物占据车道的宽度,并将检测到的障碍物信息发送给处理器,存储器中存储有可在处理器上运行的计算机程序,所述处理器在执行所述计算机程序时实现上述方法实施例中的方法。
[0057]
也就是说,以上方法实施例中的方法应理解为可由计算机程序指令实现车辆避障方法的流程。可提供这些计算机程序指令到处理器,使得通过处理器执行这些指令产生用于实现上述方法流程所指定的功能。
[0058]
本实施例所指的处理器是指微处理器mcu或可编程逻辑器件fpga等的处理装置。
[0059]
本实施例所指的存储器包括用于存储信息的物理装置,通常是将信息数字化后再以利用电、磁或者光学等方式的媒体加以存储。例如:利用电能方式存储信息的各式存储器,ram、rom等;利用磁能方式存储信息的的各式存储器,硬盘、软盘、磁带、磁芯存储器、磁泡存储器、u盘;利用光学方式存储信息的各式存储器,cd或dvd。当然,还有其他方式的存储器,例如量子存储器、石墨烯存储器等等。
[0060]
通过上述存储器、处理器以及计算机程序构成的装置,在计算机中由处理器执行相应的程序指令来实现,处理器可以搭载各种操作系统,如windows操作系统、linux系统、android、ios系统等。
[0061]
车辆实施例:
[0062]
本实施例的车辆包括车辆本体和车辆避障装置,车辆避障装置已在装置实施例中进行了详细介绍,此处不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。