1.本发明涉及仿生大兜虫生态机器人。
背景技术:
2.由国家林业和草原局政府网相关数据可知,由图1所示,我国森林面积和蓄积实现30年持续增长,森林覆盖率22.96%,面积2.2亿公顷,蓄积175.6亿立方米。但是,我国森林资源管理与经营和一些发达国家相比仍有较大差距,需要不断完善森林资源保护发展制度,完善森林督查和执法协作机制。
3.我国目前采取最多的森林监测方法为:定期森林资源调查,建立森林资源档案,及时更新统计数据,或用数学模型更新。然而该种方法人工工作量大,数据统计误差较大,对森林的保护效果仍有提高空间。
4.目前主流的机器人设计方案多为轮式机器人、履带式机器人,其机械结构简单,无法适应各类生态的复杂地形,且无法灵活地执行相关任务。
技术实现要素:
5.本发明提供一种仿生大兜虫生态机器人,其能够在森林进行行走,适用于多种地形,能够更好满足生态修复及监测的各种需求。
6.根据本发明实施例,提供一种仿生大兜虫生态机器人,包括:头部,其仿生大兜虫流线型头部,设置在机器人前端;尾壳,其仿生大兜虫甲壳,设置在机器人尾端;六足爬行机构,其每一条足均包括仿生腿以及驱动仿生腿做椭圆运动以模仿大兜虫行走的驱动系统;双翼系统,其包括仿生翅,以及驱动仿生翅收展和煽动的驱动机构;以及视觉识别系统,感知机器人周围环境。
7.上述的仿生大兜虫生态机器人,还包括样本采摘机构,其包括三自由度机械手,以及驱动三自由度机械手水平旋转、垂直运动和开合运动的驱动机构。
8.上述的仿生大兜虫生态机器人,还包括能够降到地面支撑机器人的支撑脚。
9.上述的仿生大兜虫生态机器人,还包括钻头,以及驱动钻头旋转和垂直升降的驱动机构。
10.上述的仿生大兜虫生态机器人,还包括:种子储存器;分位盘;驱动种子储存器上下抖动使种子落入分位盘内的第一驱动机构;以及使分位盘内的种子落入钻头钻开的孔内的第二驱动机构。
11.上述的仿生大兜虫生态机器人,其特征在于,还包括:除草机构。
附图说明
12.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍。
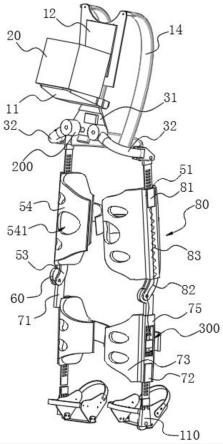
13.图1为本发明一实施例提供的仿生大兜虫生态机器人示意图。
14.图2为本发明一实施例提供的六足爬行机构示意图。
15.图3为本发明一实施例提供的六足爬行机构部分结构示意图。
16.图4为本发明一实施例提供的样本采摘机构示意图。
17.图5为本发明一实施例提供的固位工作模块示意图。
18.图6为本发明一实施例提供的除草机构示意图。
19.图7为本发明一实施例提供的打孔机构示意图。
20.图8为本发明一实施例提供的播种机构示意图。
21.图9为本发明一实施例提供的运输储藏装置示意图。
22.图10为本发明一实施例提供的双翼系统示意图。
23.图11为本发明一实施例提供的仿生头部示意图。
24.图12为本发明一实施例提供的仿生尾壳体示意图。
25.图13为本发明一实施例提供的视觉识别系统示意图。
具体实施方式
26.图1示出了一种仿生大兜虫生态机器人,包括六足爬行机构100、样本采摘机构200、固位工作机构300、除草机构400、打孔机构500、播种机构600、运输储存机构700、双翼系统800、头尾仿生机构900和视觉识别系统1000。
27.模仿大兜虫的爬行方式设计六足爬行机构100,通过智能控制改变六足的运动频率和运动速率实现差速转弯。机器人通过视觉识别系统1000,可自主识别林间路况并分析判断,完成避障等操作,使机器人顺利游走于林间采集样本,完成监测、修复部分生态系统等工作。另外,视觉识别系统1000可于林间拍摄视频自主分析,反馈终端红色(异常)或绿色(正常)信号,由终端辅助完成修复。也可由终端观测林间状态,人工参与操作,辅助规避障碍、监测林间生态或检测林间摄像头是否失效等。双重监测,加强了机器人监测的准确性。
28.如图2、图3,六足爬行机构100的每一条足均包括仿生腿107以及驱动仿生腿107做椭圆运动以模仿大兜虫行走的驱动系统。为了增强仿生腿107与地面间的摩擦力,利于林间攀爬,仿生腿107底部设计的比较粗糙。例如,可以在仿生腿107上设置橡胶套108。
29.驱动系统包括电机101、齿轮102、偏心齿轮103、连接组件,电机101转轴与齿轮102连接,齿轮102与偏心齿轮103啮合,偏心齿轮103轴与连接组件连接,仿生腿107安装在连接组件上。电机101驱动偏心齿轮103旋转,偏心齿轮103通过连接组件带动仿生腿107做周期性弧形运动。连接组件起到连接偏心齿轮103和仿生腿107的作用,本技术并不限定连接组件具体结构,因为其结构可以是多样化的。例如,连接组件可以包括相连接的内直角块104、外直角块105,以及支撑内直角块104、外直角块105使其在偏心齿轮103带动下沿着设定弧形轨迹运动的机架106。若机器人需要转弯,智能控制左右两侧的仿生腿107获得不同运动速度,形成差速,实现转弯。当右腿速度大于左腿速度时,向左转;左腿速度大于右腿,向右转。
30.如图4,样本采摘机构200包括蜗杆201、转台202、电机203、齿轮204、齿轮205、齿轮206、轴207、丝杆208、蜗杆螺帽209、xs马达210、减速齿轮箱211、丝杆212、蜗杆螺帽213、带孔支撑杆214、机械爪215。
31.机械爪215具有三个自由度,能够在水平面内旋转、上下垂直移动、左右翻转。转台
202的圆周面具有与蜗杆201配合的齿。机械爪215通过蜗杆201与转台202的配合实现三百六十度的旋转。齿轮204、齿轮205相啮合。电机203带动齿轮204旋转,用一个同规格模数为1.5、齿数为10的齿轮205增加传动距离,使用同规划柱形通孔齿轮206连接金属轴207,轴207上加装了丝杆208,机械手215通过蜗杆螺帽209与丝杆208相连实现垂直升降。通过xs马达210与减速齿轮箱211配合改变旋转方向,带动丝杆212旋转,通过蜗杆螺帽213的前后移动带动带孔支撑杆214旋转从而控制机械爪215的开合。
32.参见图9,采摘机构200通过旋转可将采摘样本放置后方传送带703上,机械手215通过xs马达210与减速齿轮箱211配合,加装轴套及蜗杆212,配合蜗杆螺帽213达到直线运动的传动效果,利用支撑杆配件214与带孔的黑色i形接口支撑杆214形成低副,达到相对旋转的效果,最终形成有一个自由度的机械手215抓夹结构。通过电机203和齿轮204、205、206配合可利用丝杆208配合安装与机械手结构上的蜗杆螺帽209,使其可上下移动。同时蜗杆201与转台202的配合使其可360
°
旋转将采摘样本放置后方传送带703上。
33.如图5,固位工作机构300包括光轴301、压板302、连接板303和气泵304。光轴301用于限位,安装于模块两侧。压板302与光轴301相连起支撑作用。连接板303主要用于各组件的固定。气泵304为该模块动力源,配合电磁阀达到上下升降的效果。当装置需要采摘时,由二位三通电磁阀通气,使气泵304内气体增加,活塞向下移动,带动压板302向下移动。同时,由光轴301限位,固定压板302运动轨迹,使其始终垂直运动。连接板303与仿生机器人相连接,固位器启动,可增大装置与地面的接触面积,稳定将装置固定于采摘点,提高采摘样本的稳定性、准确性。
34.如图6,除草机构400包括双头电机401、齿轮减速箱402、齿条403、xs马达404、除草扇叶405。除草机构400由xs马达404和齿轮减速箱402驱动。xs马达404为动力源,减速箱外接齿轮与齿条滑轨403配合,使整个模块可沿装置前部齿条组左右平移草;再由双头电机401控制左右除草扇叶405旋转除草。
35.工作时,xs马达404启动通过减速箱402齿条滑轨403配合,使整个模块沿装置前部齿条左右平移,寻找合适位置除草,利于装置全方位除草,确定位置后启动双头电机401控制左右除草扇叶405旋转对杂草进行切割除草。
36.如图7,打孔机构500包括xs马达501、齿轮减速箱502、齿条滑轨503、xs马达504和丝杆506。丝杆钻孔结构位于整体装置最前方两侧。每个由1个xs马达501和齿轮减速箱502驱动。xs马达501为动力源,减速箱外接齿轮与齿条滑轨503配合,使滑块在滑轨可上下平移。再由另一个xs马达504和齿轮减速箱505使丝杆506转动,螺旋上下运动。以xs马达501为动力输入,使减速箱502可利用齿条滑轨上下平移,更利于装置向下快速钻进。同时另一个xs马达504和齿轮减速箱505控制螺旋丝杆506转动,配合马达501使打孔模块同时具有旋转和垂直升降运动,加快了钻孔进度。
37.如图8,播种机构600主要由曲柄滑块机构、间歇旋转机构等构成,包括xs马达601、齿轮减速箱602、齿轮轴603、曲轴604、支撑杆605、长柱606、种子储存器607、分位盘内盘608、分位盘外盘609、微型马达610。装置顶部由一个xs马达601在齿轮减速箱602的作用下带动齿轮轴603转动,齿轮轴603带动曲轴604旋转。曲轴604与支撑杆605相配合,支撑杆605与长柱606相配合,以此构成了一个曲柄滑块机构。齿轮轴603固定于顶部,曲轴604充当曲柄与连杆连接。在装置前部上方有一个种子储存器607,可用于储存所需播种种子。下方的
分位盘内盘608、分位盘外盘609可控制种子匀速周期性下落。
38.工作时启动马达601,使种子储存器607抖动后,种子沿着管道下滑至分位盘。分位盘内盘608上下有对称的两个孔,外盘609则固定不动,内盘在直流24v微型马达610的作用下旋转,若分位盘内盘608与外盘609的上孔对其,则种子落入内盘608内腔暂存。当分位盘内盘608与外盘609的下孔孔对其,则种子从分位盘内盘608内腔落出。在限位装置的作用下,种子沿着规定路径落下,从而精准落在钻孔点,从而完成播种过程。分位过程可通过控制内盘608的转动速度控制种子落出速率,通过设定既定周期完成两孔的重合,从而控制种子的播种效率,进一步提高了装置的兼容性、适配性。
39.如图9,存储运输存储机械爪采集的样本的运输存储机构包括xs马达701、齿轮702、齿条703、三角块704。传送带使用齿轮链条机构,电池驱动xs马达701转动,带动与xs马达701直接相连的齿轮702高速旋转,通过齿轮齿条703传送机构传输。储存内腔主要由三角块704搭建而成,位于“南洋大兜虫”的中心腹部,后方被壳体包裹。壳体仿造南洋大兜虫设计为曲面。仿生大兜虫在应急状态下,可紧急关闭自己后方的壳体,从而保护内部器官不受伤害。
40.传送带通过电机701、齿轮702、齿条703相互配合带动,将样本运至后方储存模块704储存。在传送带两端各设置一个同规格齿轮702,由电机带动齿轮702旋转,从而使得与其配合的齿条703与轨道连接块传动旋转,达到传送带的效果,运输机械手200采取的样本。
41.如图10,双翼系统800包括i形接口支撑杆801、单铆钉802、锁紧圈803、蜗杆804、蜗杆螺帽805、电机806、齿轮807、支撑杆808、塑料轴809、塑料轴810、组件811和铰链块812。带孔的i形接口支撑杆801通过规格为m6的单铆钉802与锁紧圈803配合两两相连,构成具有一个自由度(上下煽动的自由度方向)的连杆机构,通过电机带动蜗杆804和蜗杆螺帽805运动,使主动杆实现指定运动状态,进行展翅收翅以及扇动的仿生功能。扇翅结构运用曲柄滑块结构原理,使用电机806驱动齿轮807旋转,将支撑杆808的一端通过塑料轴809连接于齿轮807面上的小孔,另一端通过塑料轴810连接于带一个孔的小块组件811上,组件811通过铰链块812与翅膀结构的一端相连。当电机806工作带动齿轮807旋转时,通过支撑杆808和铰链块812的约束时翅膀实现上下扇翅的运动模式。
42.双翼模块工作时,启动电机带动蜗杆804旋转,使得蜗杆螺帽805做直线运动,从而带动固结于蜗杆螺帽805的仿生双翼完成开合运动。启动电机806,带动齿轮807旋转,从而使组件811进行上下运动,仿生大兜虫扇翅活动,用于紧急避险和短暂滑翔飞行。
43.如图11、图12,头尾仿生模块900包括头部901和尾壳902,头部901和尾壳902采用流线弧形设计运动过程阻力小,运动速度快。头部901位于装置上前端,尾壳902位于装置尾端播种模块之上。仿造南洋大兜虫外壳,采用流线型外壳作为主体,减小了装置运行阻力,提高了行进速率,同时可缓冲运动过程中内部器官与外壳的碰撞的冲击,也减小了样本在运动过程中的碰撞力,起到缓冲作用。
44.如图13,视觉识别系统100包括超声波距离传感器tx1001、光学颜色传感器1002、微型控制器1003、电机1004、蜗杆1005、转盘1006、微型电机1007、齿轮箱1008、联轴器1009、固位件1010。云台部分主要通过电机1004带动蜗杆1005旋转,从而使转盘1006旋转达到360
°
视角,同时利用微型电机1007配合齿轮箱1008使用联轴器1009和固位件1010使视觉模块拥有双自由度全方位视角。
45.装置启动后,可根据光学颜色传感器1002识别路径中各个障碍物,同时通过超声波距离传感器tx1001测出障碍物与仿生蜘蛛的距离。微型控制器1003接收到信号后,自动做出避障判断。通过电机1004和微型电机1007的工作,使转盘1006和视觉识别装置进行旋转,令视角变化,对准指定参照物,并传输信息。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。