技术特征:
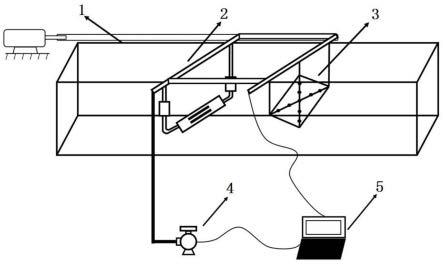
1.一种通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:包括水槽、单自由度振动模块、主动控制模块、测速模块、智能体模块,所述水槽为实验提供流体环境;所述单自由度振动模块包括钝体模型、支架和阻尼器;所述钝体模型置于水中,通过支架与水槽滑动连接,能够在水中做模拟运动;所述钝体模型的两侧均设置有阻尼器,以实现钝体在竖直方向上的单自由度振动;所述主动控制模块包括发生器和水泵,所述发生器为排布在钝体模型表面的射流孔,水泵通过导管与发生器连通;所述测速模块设置于钝体模型的后方,用于采集并反馈流场信息;所述智能体模块接收测速模块反馈的流场信息,实时计算控制参数,对水泵的抽水和喷水动作、流速实时控制。2.根据权利要求1所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述支架包括上支杆、侧支杆和下支杆,所述上支杆与水槽相对两侧壁的外缘滑动连接,能够沿水槽侧壁外缘做直线运动;所述钝体模型的两端与下支杆固定连接;所述下支杆的两侧外端分别通过阻尼器、侧支杆与上方支杆的两端连接。3.根据权利要求2所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述阻尼器包括柱体杆件、外筒和弹簧;所述外筒为底部开口的套筒结构,其顶部开有中心孔;所述柱体杆件沿轴向贯穿外筒,其中部设有限位装置;所述弹簧设置于外筒内,其上端与外筒顶部内端面连接,下端与限位装置的上端面连接;所述柱体杆件的底部通过下支杆连接,所述外筒的侧壁与侧支杆连接;基于弹簧的压缩或拉升作用力,柱体杆件能够相对外筒做轴向运动,因此钝体模型受到外力作用远离弹簧的平衡位置后,会在阻尼器限制下做竖直方向的单自由度振动。4.根据权利要求1所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述钝体模型为中空的圆柱结构,沿周向设置有多个径向射流孔,即发生器。5.根据权利要求4所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述发生器的数量为10个,其中心轴分别与钝体模型圆形截面的水平中心线成夹角θ,θ=0
°
,
±
40
°
,
±
80
°
,
±
120,
±
150
°
,180
°
,位于所述水平中心线两侧的发生器孔径是钝体模型圆形截面周长的1/30,其他位置的发生器孔径是钝体模型圆形截面周长的1/60。6.根据权利要求5所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述发生器的射流作动方向均为水平方向,即仅向水平方向抽/喷水;位于θ=
±
40
°
,
±
80
°
的发生器接收到的控制信号相同,上、下游对应位置发生器,即位于θ= 80
°
和θ= 120
°
、θ= 40
°
和θ= 150
°
、θ=0
°
和θ=180
°
、θ=-40
°
和θ=-150
°
、θ=-80
°
和θ=-120
°
的发生器收到的控制信号相位差为180
°
。7.根据权利要求1所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述测速模块通过连接架与所述单自由度振动模块的支架连接,与钝体模型之间为固定距离;包括测压尾耙、数据线和采集卡,测压尾耙上的传感器以阵列形式布置,并通过数据线与采集卡连接,将流场信息反馈给智能体模块。8.根据权利要求1所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述智能体模块为数据处理终端,包括高性能计算机和单片机,接收所述测速模块获得的流场信息,实时计算控制参数,由所述单片机生成并发送作动信号至主动控制模块。
9.根据权利要求1所述通过主动流动控制实现钝体水动力隐身的实验装置,其特征在于:所述水槽为顶部开口的方槽,其两侧壁的顶端设置有导轨,所述单自由度振动模块的支架和测速模块的连接架均与导轨配合安装,由电机驱动支架沿导轨做直线运动,从而带动单自由度振动模块和测速模块在流体中运动。10.一种权利要求1-9任一项所述通过主动流动控制实现钝体水动力隐身的方法,其特征在于具体步骤如下:步骤1:电机开启后,钝体模型在水槽中运动并产生尾涡脱落,此时流体在钝体模型表面产生周期性作用力;流体作用力将阻尼器拉伸或压缩,使得钝体模型沿竖直方向的单自由度振动;步骤2:所述测速模块的测压尾耙获取下游流场中压力,并换算得到流场固定测点处各个方向的速度;步骤3:所述智能体模块接收流场速度信息,计算机进行在线训练,定义尾流速度与参考速度的速度差为目标函数,通过深度强化学习生成控制策略;再利用单片机输出控制信号至主动控制模块,根据控制信号调节水泵动作,进而控制发生器处抽/喷水的速度,调制流场结构。
技术总结
本发明一种通过主动流动控制实现钝体水动力隐身的实验装置及方法,属于流体力学、流动控制领域;实验装置包括水槽、单自由度振动模块、主动控制模块、测速模块、智能体模块,水槽为实验提供流体环境;单自由度振动模块的钝体模型置于水中,能够在水中做模拟运动;主动控制模块包括发生器和水泵,所述发生器为排布在钝体模型表面的射流孔,水泵通过导管与发生器连通;测速模块用于采集并反馈流场信息;智能体模块接收测速模块反馈的流场信息,实时计算控制参数,对水泵的抽水和喷水动作、流速实时控制。钝体模型在流体中运动,流场会发生显著改变,而主动流动控制利用发生器在近壁区抽/吸流体,影响剪切层发展,因而能有效改变下游尾涡的形态。游尾涡的形态。游尾涡的形态。
技术研发人员:任峰 宋健 胡海豹
受保护的技术使用者:西北工业大学
技术研发日:2022.08.26
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。