1.本发明属于并联机构技术领域,特别涉及一类三独立螺旋运动自由度并联机构。
背景技术:
2.现有的并联机构均为三自由度转动的立方体角台并联机构,自由度类型较为单一,不能满足运动模拟、运动康复等设备对并联机构自由度多样性的需求。其中具有独立螺旋运动的机构在运动仿真、机器装配等领域有一定的应用前景,但目前的含独立螺旋运动的并联机构十分少见,只有少数并联机构能通过分叉运动的形式实现独立螺旋运动,并且多大都直接通过使用螺旋副实现,严重影响了机构的性能。
技术实现要素:
3.针对现有技术存在的问题,本发明提供一类三独立螺旋运动自由度立方体并联机构,丰富了并联机构末端运动类型,能够利用移动副和转动副组合的形式实现机构末端绕三个螺旋轴做独立螺旋运动,而不使用螺旋副,从而简化结构,降低了机构加工和装配难度,提高了机构的承载能力,此类机构具有工作空间较大、容易控制等优点。
4.本发明采用的技术方案是,一类三独立螺旋运动自由度并联机构,其包括定平台、动平台以及连接定平台和动平台的三条分支,所述定平台呈立方体角台结构状,且所述定平台包括第一机架、第二机架和第三机架,所述第一机架、第二机架以及第三机架之间两两垂直且相交于一点,且所述定平台中的第一机架、第二机架以及第三机架与所述三条分支中的第一移动副、第一连杆以及第二连杆构成立方体结构状;所述动平台呈等边三角形结构状,且连接所述定平台和动平台的三条分支包括第一分支、第二分支和第三分支,所述第一分支、第二分支和第三分支的两端分别与所述定平台的各机架以及所述动平台的各端点连接,且所述第一分支、第二分支和第三分支均为驱动分支,所述第一分支、第二分支和第三分支中的第一移动副均为驱动副;所述第一分支、第二分支和第三分支均由第一移动副、第一转动副、第一连杆、第一万向铰、第二连杆和第二转动副构成prur串联分支,所述第一移动副的第一端与所述定平台中相对应的机架相连,且所述第一移动副的第二端通过所述第一转动副与所述第一连杆的第一端相连,所述第一移动副轴线与所述第一转动副轴线重合,所述第一连杆的第二端与所述第一万向铰相连,且所述第一连杆垂直于所述第一转动副轴线以及所述第一万向铰的内侧转动副轴线,所述第一万向铰的内侧转动副轴线平行于所述第一转动副轴线,所述第二连杆的第一端与所述第一万向铰相连,且所述第一万向铰的外侧转动副轴线与所述第二连杆轴线重合,所述第二连杆的第二端通过所述第二转动副与所述动平台中相对应的端点相连,且所述第二转动副轴线垂直于所述第二连杆,所述第一分支、第二分支以及第三分支中的第二转动副轴线汇交于一点。
5.本发明的第二方面采用的技术方案是,一类三独立螺旋运动自由度并联机构,其包括定平台、动平台以及连接定平台和动平台的三条分支,所述定平台呈立方体角台结构状,且所述定平台包括第一机架、第二机架和第三机架,所述第一机架、第二机架以及第三
机架之间两两垂直且相交于一点,且所述定平台中的第一机架、第二机架以及第三机架与所述三条分支中的第一移动副、第一连杆以及第二连杆构成立方体结构状;所述动平台呈等边三角形结构状,且连接所述定平台和动平台的三条分支包括第一分支、第二分支和第三分支,所述第一分支、第二分支和第三分支的两端分别与所述定平台的各机架以及所述动平台的各端点连接,且所述第一分支、第二分支和第三分支均为驱动分支,所述第一分支、第二分支和第三分支中的第一移动副均为驱动副;所述第一分支、第二分支和第三分支均由第一移动副、第一万向铰、第一连杆、第一转动副、第二连杆和第二转动副构成purr串联分支,所述第一移动副的第一端与所述定平台中相对应的机架相连,且所述第一移动副的第二端通过所述第一万向铰与所述第一连杆的第一端相连,所述第一移动副轴线与所述第一万向铰的内侧转动副轴线重合,且所述第一万向铰的外侧转动副轴线与所述第一连杆轴线重合,所述第一连杆的第二端通过所述第一转动副与所述第二连杆的第一端相连,且所述第一转动副轴线垂直于所述第一连杆,所述第一转动副轴线与第二连杆轴线重合,所述第二连杆的第二端通过所述第二转动副与所述动平台中相对应的端点相连,且所述第二转动副轴线垂直于所述第二连杆,所述第一分支、第二分支以及第三分支中的第二转动副轴线汇交于一点。
6.本发明的第三方面采用的技术方案是,一类三独立螺旋运动自由度并联机构,其包括定平台、动平台以及连接定平台和动平台的三条分支,所述定平台呈立方体角台结构状,且所述定平台包括第一机架、第二机架和第三机架,所述第一机架、第二机架以及第三机架之间两两垂直且相交于一点,且所述定平台中的第一机架、第二机架以及第三机架与所述三条分支中的第一移动副、第一连杆以及第二移动副构成立方体结构状;所述动平台呈等边三角形结构状,且连接所述定平台和动平台的三条分支包括第一分支、第二分支和第三分支,所述第一分支、第二分支和第三分支的两端分别与所述定平台的各机架以及所述动平台的各端点连接,且所述第一分支、第二分支和第三分支均为驱动分支,所述第一分支、第二分支和第三分支中的第一移动副均为驱动副;所述第一分支、第二分支和第三分支均由第一转动副、第一移动副、第一连杆、第二转动副、第二移动副和第三转动副构成prrpr串联分支,所述第一移动副的第一端与所述定平台中相对应的机架相连,且所述第一移动副的第二端通过所述第一转动副与所述第一连杆的第一端相连,所述第一移动副轴线与所述第一转动副轴线重合,所述第一连杆的第二端通过所述第二转动副与所述第二移动副的第一端相连,所述第一连杆均垂直于所述第一转动副轴线以及所述第二转动副轴线,且所述第一转动副轴线垂直于所述第二转动副轴线,所述第二转动副轴线与所述第二移动副轴线重合,所述第二移动副的第二端通过所述第三转动副与所述动平台中相对应的端点相连,且所述第二移动副轴线垂直于所述第三转动副轴线,所述第一分支、第二分支以及第三分支中的第三转动副轴线汇交于一点。
7.本发明的特点和有益效果是:
8.1、本发明提供的一类三独立螺旋运动自由度并联机构,能够在不使用螺旋副的前提下,利用移动副和转动副组合的形式实现机构末端绕三个螺旋轴做独立螺旋运动,并且能够通直线驱动的方式控制末端独立螺旋运动。
9.2、本发明提供的一类三独立螺旋运动自由度并联机构,定平台、三个分支与动平台构成立方体形状,工作空间大,结构简单,容易控制,能够基于此机构设计微操作机器人
等设备。
附图说明
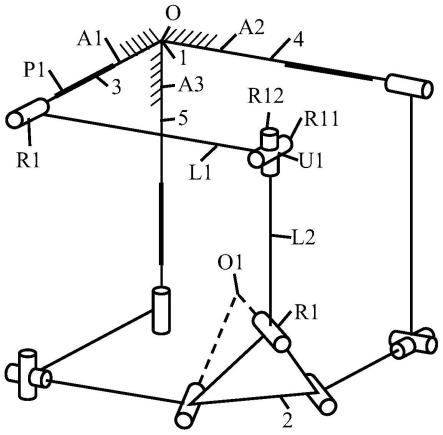
10.图1是本发明一类三独立螺旋运动自由度并联机构的实施例1结构示意图;
11.图2是本发明一类三独立螺旋运动自由度并联机构的实施例2结构示意图;
12.图3是本发明一类三独立螺旋运动自由度并联机构的实施例3结构示意图。
13.主要附图标记:
14.定平台1;第一机架a1;第二机架a2;第三机架a3;动平台2;第一分支3;第二分支4;第三分支5;第一移动副p1;第二移动副p2;第一转动副r1;第二转动副r2;第三转动副r3;内侧转动副r11;外侧转动副u12;第一万向铰u1;第一连杆l1;第二连杆l2。
具体实施方式
15.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
16.实施例1
17.本发明提供一类三独立螺旋运动自由度并联机构,如图1所示,其包括定平台1、动平台2以及连接定平台1和动平台2的三条分支,定平台1呈立方体角台结构状,且定平台1包括第一机架a1、第二机架a2和第三机架a3,第一机架a1、第二机架a2以及第三机架a3之间两两垂直且相交于一点o,且定平台1中的第一机架a1、第二机架a2以及第三机架a3与三条分支中的第一移动副p1、第一连杆l1以及第二连杆l2构成立方体结构状。
18.动平台2呈等边三角形结构状,且连接定平台1和动平台2的三条分支包括第一分支3、第二分支4和第三分支5,第一分支3、第二分支4和第三分支5的两端分别与定平台1的各机架以及动平台2的各端点连接,且第一分支3、第二分支4和第三分支5均为驱动分支,第一分支3、第二分支4和第三分支5中的第一移动副p1均为驱动副。
19.第一分支3、第二分支4和第三分支5均由第一移动副p1、第一转动副r1、第一连杆l1、第一万向铰u1、第二连杆l2和第二转动副r2构成prur串联分支,第一移动副p1的第一端与定平台1中相对应的机架相连,且第一移动副p1的第二端通过第一转动副r1与第一连杆l1的第一端相连,第一移动副轴线p1与第一转动副r1轴线重合,第一连杆l1的第二端与第一万向铰u1相连,且第一连杆l1垂直于第一转动副r1轴线以及第一万向铰u1的内侧转动副r11轴线,第一万向铰u1的内侧转动副r11轴线平行于第一转动副r1轴线,第二连杆l2的第一端与第一万向铰u1相连,且第一万向铰u1的外侧转动副r12轴线与第二连杆l2轴线重合,第二连杆l2的第二端通过第二转动副r2与动平台2中相对应的端点相连,且第二转动副r2轴线垂直于第二连杆l2,第一分支3、第二分支4以及第三分支5中的第二转动副r2轴线汇交于一点o1。
20.实施例2
21.本发明第二方面采用的技术方案,如图2所示,其包括定平台1、动平台2以及连接定平台1和动平台2的三条分支,定平台1呈立方体角台结构状,且定平台1包括第一机架a1、第二机架a2和第三机架a3,第一机架a1、第二机架a2以及第三机架a3之间两两垂直且相交于一点o,且定平台1中的第一机架a1、第二机架a2以及第三机架a3与三条分支中的第一移
动副p1、第一连杆l1以及第二连杆l2构成立方体结构状。
22.动平台2呈等边三角形结构状,且连接定平台1和动平台2的三条分支包括第一分支3、第二分支4和第三分支5,第一分支3、第二分支4和第三分支5的两端分别与定平台1的各机架以及动平台2的各端点连接,且第一分支3、第二分支4和第三分支5均为驱动分支,第一分支3、第二分支4和第三分支5中的第一移动副p1均为驱动副。
23.第一分支3、第二分支4和第三分支5均由第一移动副p1、第一万向铰u1、第一连杆l1、第一转动副r1、第二连杆l2和第二转动副r2构成purr串联分支,第一移动副p1的第一端与定平台1中相对应的机架相连,且第一移动副p1的第二端通过第一万向铰u1与第一连杆l1的第一端相连,第一移动副p1轴线与第一万向铰u1的内侧转动副r11轴线重合,且第一万向铰u1的外侧转动副u12轴线与第一连杆l1轴线重合,第一连杆l1的第二端通过第一转动副r1与第二连杆l2的第一端相连,且第一转动副r1轴线垂直于第一连杆l1,第一转动副r1轴线与第二连杆l2轴线重合,第二连杆l2的第二端通过第二转动副r2与动平台2中相对应的端点相连,且第二转动副r2轴线垂直于第二连杆l2,第一分支3、第二分支4以及第三分支5中的第二转动副r2轴线汇交于一点o1。
24.实施例3
25.本发明第三方面采用的技术方案,如图3所示,其包括定平台1、动平台2以及连接定平台1和动平台2的三条分支,定平台1呈立方体角台结构状,且定平台1包括第一机架a1、第二机架a2和第三机架a3,第一机架a1、第二机架a2以及第三机架a3之间两两垂直且相交于一点o,且定平台1中的第一机架a1、第二机架a2以及第三机架a3与三条分支中的第一移动副p1、第一连杆l1以及第二移动副p2构成立方体结构状。
26.动平台2呈等边三角形结构状,且连接定平台1和动平台2的三条分支包括第一分支3、第二分支4和第三分支5,第一分支3、第二分支4和第三分支5的两端分别与定平台1的各机架以及动平台2的各端点连接,且第一分支3、第二分支4和第三分支5均为驱动分支,第一分支3、第二分支4和第三分支5中的第一移动副p1均为驱动副。
27.第一分支3、第二分支4和第三分支5均由第一转动副p1、第一移动副r1、第一连杆l1、第二转动副r2、第二移动副p2和第三转动副r3构成prrpr串联分支,第一移动副p1的第一端与定平台1中相对应的机架相连,且第一移动副p1的第二端通过第一转动副r1与第一连杆l1的第一端相连,第一移动副p1轴线与第一转动副r1轴线重合,第一连杆l1的第二端通过第二转动副r2与第二移动副p2的第一端相连,第一连杆l1均垂直于第一转动副r1轴线以及第二转动副r2轴线,且第一转动副r1轴线垂直于第二转动副r2轴线,第二转动副r2轴线与第二移动副p2轴线重合,第二移动副p2的第二端通过第三转动副r3与动平台2中相对应的端点相连,且第二移动副p2轴线垂直于第三转动副r3轴线,第一分支3、第二分支4以及第三分支5中的第三转动副r3轴线汇交于一点o1。
28.本发明的一类三独立螺旋运动自由度并联机构,其第一分支3、第二分支4和第三分支5均为驱动分支,第一分支3、第二分支4和第三分支5中的第一移动副p1作为主动驱动副,动平台2作为末端执行器,当控制主动驱动副运动时,动平台2能够绕空间中三条虚拟螺旋轴做三个独立螺旋运动。
29.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案
做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。