1.本发明涉及固体颗粒自动化取样技术,具体为一种用于固体颗粒物的自动化取样系统。
背景技术:
2.取样又称抽样,是指从大量的样品中,随机取得一个数量适合、有代表性的供检样品,其目的就是从一大批样品中取得一个数量适合于供检验用的样品,并且这一样品能够准确地代表该批被检验样品的成分;
3.现有技术中,自动化取样设备在进行固体颗粒物的取样时,随取样管在取样固体颗粒堆内部的向下插入过程中,因固体颗粒堆上部固体颗粒对下部固体颗粒的压持,随取样管的向下插入,使取样管受到的阻力逐渐增大,取样管向下插入进行取样操作困难,且对取样管向下插入的作用力过大时易导致取样管的损伤;用于取样的取样管多为一体式结构,不同的取样需求需要不同长度的取样管,长度较长的取样管在使用过程中,取样管易与其他设备发生碰撞,使用不便;取样管下端为水平结构,使取样管下端在插入至容器底部后,取样管下端与容器底部水平面紧密接触,导致取样管下端被封死,取样管内部的固体颗粒难以继续通过抽气的方式进行取样操作,且取样管内部固体颗粒无法进行取样,导致取样量的减少,使后续对固体颗粒的检测结果因取样量不足导致结果不准确;
4.针对上述技术问题,本技术提出一种解决方案。
技术实现要素:
5.本发明的目的就在于通过取样管下端设置的绞龙在转动过程中将样品堆进行松动后向取样管内部输送,使取样管在想固体颗粒对内部下插得过程中收到的阻力减小,通过液压总箱内部液体逐步通过液压管向液压箱内部输送,推动连接在液压箱内部的推动杆带动取样管进行伸展,达到对取样管长度调节的目的,通过输气管与输气孔的连通,将外界气体从吸气孔位置处吸入取样管内部,继续利用气流的带动进行固体颗粒的取样操作,解决取样管下插取样受阻,取样操作困难、取样管长度固定不便于移动和取样管下端插入至容器底部后,取样管内部样品无法继续进行取样的问题,而提出一种用于固体颗粒物的自动化取样系统。
6.本发明的目的可以通过以下技术方案实现:
7.一种用于固体颗粒物的自动化取样系统,包括机器人底座,所述机器人底座上表面转动连接有取样机器人,所述取样机器人远离所述机器人底座的一端转动连接有取样管,所述取样管分为伸缩管下段、伸缩管中段和伸缩管上段三种,所述伸缩管下段内侧壁上发连接有连接板,所述连接板上表面中间位置处通过转动套转动连接有旋转轴,所述旋转轴外侧壁下方连接有绞龙,所述绞龙上表面连接有若干个均匀分布的限位杆,所述绞龙上表面对应所述限位杆位置处连接有连接弹簧,所述限位杆上端连接有限位盘,所述旋转轴下端的形状为球状。
8.作为本发明的一种优选实施方式,伸缩管下段内侧壁下方开设有弹性槽,所述弹性槽内部下表面一侧转动连接有弹动板,所述弹性槽内部上下表面均开设有连通腔,所述伸缩管下段内部对应所述连通腔位置处开设有空腔,所述弹动板靠近所述连通腔的一侧连接有封堵布,空腔内部对应封堵布位置处连接有牵引弹簧,所述弹性槽内部对应所述弹动板后表面连接有通电弹簧。
9.作为本发明的一种优选实施方式,伸缩管下段内侧壁靠近所述弹性槽位置处的另一侧开设有弹性腔,弹性腔内部连接有开关金属片组,弹性腔内部对应开关金属片组位置处通过复位弹簧连接有挤压钮,挤压钮靠近弹性腔内部的一端连接有绝缘板。
10.作为本发明的一种优选实施方式,伸缩管下段外侧壁上发套设有伸缩管中段,所述伸缩管中段外侧壁上发套设有伸缩管上段,所述伸缩管下段和所述伸缩管中段外侧壁上发均一体成型有限位环,所述伸缩管中段和所述伸缩管上段内侧壁下方对应所述限位环位置处也一体成型有限位环。
11.作为本发明的一种优选实施方式,伸缩管下段、所述伸缩管中段和所述伸缩管上段内侧壁上方均连接有液压箱,所述液压箱内部下方滑动连接有推动杆,所述伸缩管下段和所述伸缩管中段上表面均连接有液压管,所述伸缩管中段和所述伸缩管上段上连接的液压箱对应所述伸缩管下段均开设有凹槽。
12.作为本发明的一种优选实施方式,伸缩管下段上表面开设有若干个均匀分布的输气孔,所述伸缩管下段上表面对应所述输气孔位置处连接有输气管,所述伸缩管上段上表面外侧开设有若干个孔洞,孔洞内侧壁连接有密封环,所述伸缩管下段内部对应限位盘上方开设有活动槽,所述伸缩管下段内部对应所述活动槽位置处开设有封堵槽,封堵槽内部滑动连接有输气挡板,所述输气挡板内侧壁靠近所述伸缩管下段内部连接有连接环套,所述输气挡板外侧壁下方开设有连通孔,所述伸缩管下段内侧壁下方对应所述输气孔下端位置处开设有吸气孔。
13.作为本发明的一种优选实施方式,输气管外侧壁一侧开设有拉动槽,所述伸缩管上段外侧壁对应所述密封环位置处转动连接有拉动齿轮,所述拉动齿轮外侧壁中间位置处连接有连接轴,连接轴两端均连接有传动齿轮,所述伸缩管上段外侧壁对应相邻两个传动齿轮位置处转动连接有连动齿轮。
14.与现有技术相比,本发明的有益效果是:
15.1、通过取样管下端设置的绞龙在转动过程中将堆积的固体颗粒进行松动后向取样管内部输送,使取样管在想固体颗粒对内部下插得过程中收到的阻力减小,便于进行取样操作,且伸缩管下段上的弹动板在挤压钮的控制下,可通过通电弹簧的快速推动转动弹出对堵塞在绞龙进料位置处的杂质进行疏通,使取样管的取样操作可顺利进行;
16.2、通过伸缩管下段、伸缩管中段和伸缩管上段在液压箱和液压总箱的作用下相互套设,并通过液压总箱内部液体逐步通过液压管向液压箱内部输送,推动连接在液压箱内部的推动杆带动伸缩管下段和伸缩管中段向外进行伸展,达到对取样管长度调节的目的,且取样管的伸长和缩短长度均可通过液压总箱的输出液体量进行计算得知,便于进行控制;
17.3、通过伸缩管下段上输气孔与吸气孔的连通,使取样管下端因与容器底面接触被封住后,取样管可通过输气管与输气孔的连通,将外界气体从吸气孔位置处吸入取样管内
部,继续利用气流的带动进行固体颗粒的取样操作,且取样管在进行伸缩的过程中,输气管可通过拉动齿轮的带动进行取样管内外的长度移动,不会阻碍取样管内部固体颗粒的取样,且不会气体取样设备的正常运行。
附图说明
18.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
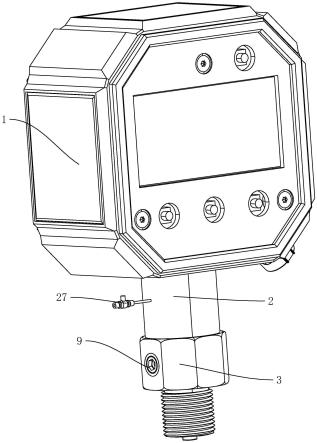
19.图1为本发明的主体结构图;
20.图2为本发明的弹性槽结构图;
21.图3为本发明图2的a部放大结构图;
22.图4为本发明的绞龙结构图;
23.图5为本发明的伸缩管结构图;
24.图6为本发明的输气管结构图;
25.图7为本发明的输气挡板结构图;
26.图8为本发明的伸缩管内部结构图;
27.图中:1、机器人底座;2、取样机器人;3、取样管;41、伸缩管下段;42、伸缩管中段;43、伸缩管上段;44、液压管;45、液压箱;46、推动杆;47、限位环;51、弹性槽;52、连通腔;53、弹动板;54、旋转轴;55、绞龙;56、限位盘;57、连接弹簧;58、限位杆;59、连接板;61、输气孔;62、密封环;63、输气管;64、拉动齿轮;65、连接环套;66、活动槽;67、吸气孔;68、输气挡板;69、连通孔;610、拉动槽。
具体实施方式
28.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
29.实施例1:
30.请参阅图1-4所示,一种用于固体颗粒物的自动化取样系统,包括机器人底座1,机器人底座1上表面转动连接有取样机器人2,取样机器人2远离机器人底座1的一端转动连接有取样管3,取样管3分为伸缩管下段41、伸缩管中段42和伸缩管上段43三种,伸缩管下段41内侧壁上发连接有连接板59,连接板59上表面中间位置处通过转动套转动连接有旋转轴54,旋转轴54的上端为十字状,旋转轴54的上端连接有限位块,伸缩管中段42对应旋转轴54位置处连接有十字连接套一,十字连接套一套设在旋转轴54的外侧,且通过限位块的限制不会与旋转轴54发生相互脱离的情况,伸缩管上段43对应旋转轴54位置处连接有十字连接套二,十字连接套一套设在十字连接套二的外侧,且通过十字连接套二外侧的限位块限制不会与十字连接套一发生相互脱离的情况,使连接十字连接套二的电机可带动旋转轴54进行转动,且不会对取样管3的伸缩造成阻碍,旋转轴54外侧壁下方连接有绞龙55,绞龙55上表面连接有若干个均匀分布的限位杆58,绞龙55上表面对应限位杆58位置处连接有连接弹簧57,限位杆58上端连接有限位盘56,限位杆58穿过连接板59上的转动套与限位盘56进行连接,限位盘56的外径大小与伸缩管下段41的内径大小相同,旋转轴54下端的形状为球状,
使旋转轴54的下端与容器底面接触时两者之间的摩擦较小,伸缩管下段41内侧壁下方开设有弹性槽51,弹性槽51内部下表面一侧转动连接有弹动板53,弹动板53的形状为弧状,且弯曲弧度大小与伸缩管下段41的弧度相同,弹性槽51内部上下表面均开设有连通腔52,伸缩管下段41内部对应连通腔52位置处开设有空腔,弹动板53靠近连通腔52的一侧连接有封堵布,空腔内部对应封堵布位置处连接有牵引弹簧,弹性槽51内部对应弹动板53后表面连接有通电弹簧,通电弹簧的连接电路与开关金属片组串联在同一个电路上,伸缩管下段41内侧壁靠近弹性槽51位置处的另一侧开设有弹性腔,弹性腔内部连接有开关金属片组,开关金属片组内部包含一对开关金属片,且两个开关金属片相互紧贴接触,弹性腔内部对应开关金属片组位置处通过复位弹簧连接有挤压钮,挤压钮靠近弹性腔内部的一端连接有绝缘板;
31.现有技术中,自动化取样设备在进行固体颗粒物的取样时,随取样管3在取样固体颗粒堆内部的向下插入过程中,因固体颗粒堆上部固体颗粒对下部固体颗粒的压持,随取样管3的向下插入,使取样管受到的阻力逐渐增大,取样管3向下插入进行取样操作困难,且对取样管3向下插入的作用力过大时易导致取样管3的损伤;
32.取样管3在向下插入进行固体颗粒的取样时,自动化取样系统可传递信号控制电机带动旋转轴54进行转动,旋转轴54的下端露出至伸缩管下段41外侧,使旋转轴54进行转动时,可通过外侧连接的绞龙55对固体颗粒进行搅动松动,使被松动的固体颗粒可在取样管3上的吸料设备的气吸作用下进行取样操作,松动后的固体颗粒随绞龙55的轨迹进行位置移动后,在吸气的作用下沿取样管3内部上升,随取样管3下插阻力的逐渐增大,使旋转轴54受压向上移动对连接弹簧57造成形变收缩,因绞龙55的搅动作用,使固体颗粒被挖取固体颗粒堆内部存在间隙,便于取样管3向下进行位置的移动,在取样管3插入至容器底部后,旋转轴54球状下端与底面接触,随取样管3的继续向下插入,连接弹簧57的形变收缩增大,取样管3与底面接触时,连接弹簧57的形变量达到最大,连接在连接弹簧57一端上的压力感应器检测到的压力数据达到设定值,使自动化取样系统传递信号给取样机器人2停止取样管3的下插操作,防止造成取样管3的损伤;
33.绞龙55转动过程中进行固体颗粒的取样时,固体颗粒堆内部含有较大的颗粒杂质,在进行取样时,颗粒较大的杂质易堵塞在绞龙55进料位置处,通电弹簧通电收缩,牵引弹动板53缩至连通腔52内部,绞龙55转动至连通腔52另一侧后对挤压钮进行挤压,挤压钮受挤压嵌入弹性腔内部,挤压钮上的绝缘板插入开关金属片组中间,使相互接触的两个开关金属片隔开,对通电弹簧供给电力的电路断开,弹动板53在弹出的通电弹簧作用下快速转动打开,对另一侧堵塞在绞龙55进料位置处的杂质进行敲击,使杂质从该位置处脱离,不妨碍绞龙55的正常下挖操作,弹动板53弹出过程中牵引连接在弹动板53三个侧面上的封堵布进行移动,使连接封堵布的牵引弹簧拉伸,固体颗粒不会进入弹性槽51内部对弹动板53的活动造成阻碍,绞龙55从挤压钮位置处转动离开后,挤压钮在复位弹簧作用下弹出,使开关金属片组的两个开关金属片再次相互接触,电路对通电弹簧进行电力供给,使弹动板53在通电弹簧牵引下进行复位,封堵布在牵引弹簧作用下进行复位。
34.实施例2:
35.请参阅图5-6和图8所示,伸缩管下段41外侧壁上发套设有伸缩管中段42,伸缩管中段42外侧壁上发套设有伸缩管上段43,伸缩管下段41和伸缩管中段42外侧壁上发均一体
成型有限位环47,通过限位环47的限制使伸缩管下段41与伸缩管中段42、伸缩管中段42与伸缩管中段42和伸缩管中段42与伸缩管上段43之间的连接不会发生相互脱离的情况,伸缩管中段42和伸缩管上段43内侧壁下方对应限位环47位置处也一体成型有限位环47,伸缩管下段41、伸缩管中段42和伸缩管上段43内侧壁上方均连接有液压箱45,液压箱45内部下方滑动连接有推动杆46,伸缩管下段41和伸缩管中段42上表面均连接有液压管44,伸缩管下段41与伸缩管中段42、伸缩管中段42与伸缩管中段42和伸缩管中段42与伸缩管上段43之间可通过推动杆46露出的长度伸长和缩短进行组成取样管3的长度调节,伸缩管中段42和伸缩管上段43上连接的液压箱45对应伸缩管下段41均开设有凹槽,使液压箱45不会对取样管3的收缩造成阻碍;
36.现有技术中,用于取样的取样管3多为一体式结构,不同的取样需求需要不同长度的取样管3,长度较长的取样管3在使用过程中,取样管3易与其他设备发生碰撞,使用不便;
37.取样管3分为伸缩管下段41、伸缩管中段42和伸缩管上段43三种,取样管3由一个伸缩管下段41、多个伸缩管中段42和一个伸缩管上段43组成,伸缩管中段42和伸缩管上段43上连接的液压箱45与自动化取样系统的液压总箱进行连通,取样管3的长度调节可通过液压总箱依次通过液压管44向伸缩管中段42和伸缩管上段43上的液压箱45内部输送,每个液压箱45内部的容量相同,使自动化取样系统可根据输送出的液体量进行取样管3伸长长度的计算,防止取样管3伸长长度过长导致取样管3与容器相互挤压造成两者损伤的情况。
38.实施例3:
39.请参阅图5-7所示,伸缩管下段41上表面开设有若干个均匀分布的输气孔61,伸缩管下段41上表面对应输气孔61位置处连接有输气管63,伸缩管上段43上表面外侧开设有若干个孔洞,孔洞内侧壁连接有密封环62,密封环62内部设置有若干个均匀分布的滚珠,使输气管63在移动时摩擦减小,输气管63连接在密封环62内侧,伸缩管下段41内部对应限位盘56上方开设有活动槽66,连接环套65与输气挡板68的连接位置处可在活动槽66内部进行上下滑动,伸缩管下段41内部对应活动槽66位置处开设有封堵槽,封堵槽内部滑动连接有输气挡板68,输气挡板68内侧壁靠近伸缩管下段41内部连接有连接环套65,连接环套65外径大小等于伸缩管下段41的内径大小,且连接环套65位于限位盘56上方,输气挡板68外侧壁下方开设有连通孔69,伸缩管下段41内侧壁下方对应输气孔61下端位置处开设有吸气孔67,吸气孔67与输气孔61下端连通,输气管63外侧壁一侧开设有拉动槽610,拉动槽610内部开设有若干个凸齿,伸缩管上段43外侧壁对应密封环62位置处转动连接有拉动齿轮64,凸齿与拉动齿轮64相互嵌合,拉动齿轮64外侧壁中间位置处连接有连接轴,其中一个连接轴的一端与步进电机的输出端连接,通过步进电机带动进行转动,连接轴两端均连接有传动齿轮,伸缩管上段43外侧壁对应相邻两个传动齿轮位置处转动连接有连动齿轮,传动齿轮与连动齿轮相互垂直且相互嵌合,并带动进行转动;
40.现有技术中,取样管3下端为水平结构,使取样管3下端在插入至容器底部后,取样管3下端与容器底部水平面紧密接触,导致取样管3下端被封死,取样管3内部的固体颗粒难以继续通过抽气的方式进行取样操作,且取样管3内部固体颗粒无法进行取样,导致取样量的减少,使后续对固体颗粒的检测结果因取样量不足导致结果不准确;
41.取样管3下端插入盛装固体颗粒的容器内部,且取样管3下端与容器底部保持水平时,伸缩管下段41内部的旋转轴54通过挤压向上移动,移动过程中与连接环套65接触并带
动连接环套65在活动槽66内部向上进行位置的滑动,连接环套65向上移动带动输气挡板68跟随向上移动,连接环套65上升至最大高度后,输气挡板68上的连通孔69对准吸气孔67位置处,输气孔61的上端通过输气管63与外界连通,使吸气设备可通过输气管63吸取外界气体至伸缩管下段41位置处,吸入的气体携带伸缩管下段41内部的固体颗粒向上进行移动,达到取样的效果,自动化取样系统传递信号控制液压总箱进行取样管3的收缩时,自动化取样系统的数据处理模块可通过回流至液压总箱内部的液体量计算得出取样管3回缩的长度,根据拉动齿轮64的半径大小可计算出拉动齿轮64的周长大小,取样管3回缩的长度大小除以拉动齿轮64的周长大小,得到拉动齿轮64的转动圈数大小,由此可计算出拉动齿轮64的转动角度大小,并将该数据传递给步进电机控制器,控制连接拉动齿轮64的连接轴进行对应角度大小的转动,使取样管3在进行收缩时,输气管63可在拉动齿轮64的带动下向外移出相同的长度大小,取样管3内部的输气管63始终保持笔直的状态,不会因松散影响取样管3内部固体颗粒的正常输送,溢出的输气管63不会发生折叠和挤压的情况,不影响输气管63继续向取样管3内部进行气体的输送,自动化取样系统传递信号控制液压总箱进行取样管3的伸长时,输气管63同步向取样管3内部进行移动。
42.本发明在使用时,伸缩管中段42和伸缩管上段43上连接的液压箱45与自动化取样系统的液压总箱进行连通,取样管3的长度调节可通过液压总箱依次通过液压管44向伸缩管中段42和伸缩管上段43上的液压箱45内部输送,每个液压箱45内部的容量相同,使自动化取样系统可根据输送出的液体量进行取样管3伸长长度的计算,液压箱45内部空间的截面积大小固定,液压总箱内部输出液体量的数据除以液压箱45内部空间截面积的数据,即为取样管3伸长的长度数据;
43.取样管3在向下插入进行固体颗粒的取样时,自动化取样系统可传递信号控制电机带动旋转轴54进行转动,旋转轴54的下端露出至伸缩管下段41外侧,使旋转轴54进行转动时,可通过外侧连接的绞龙55对固体颗粒进行搅动松动,使被松动的固体颗粒可在取样管3上的吸料设备的气吸作用下进行取样操作,松动后的固体颗粒随绞龙55的轨迹进行位置移动后,在吸气的作用下沿取样管3内部上升,随取样管3下插阻力的逐渐增大,使旋转轴54受压向上移动对连接弹簧57造成形变收缩,因绞龙55的搅动作用,使固体颗粒被挖取固体颗粒堆内部存在间隙,便于取样管3向下进行位置的移动,在取样管3插入至容器底部后,旋转轴54球状下端与底面接触,随取样管3的继续向下插入,连接弹簧57的形变收缩增大,取样管3与底面接触时,连接弹簧57的形变量达到最大,连接在连接弹簧57一端上的压力感应器检测到的压力数据达到设定值,使自动化取样系统传递信号给取样机器人2停止取样管3的下插操作,防止造成取样管3的损伤;
44.绞龙55转动过程中进行固体颗粒的取样时,固体颗粒堆内部含有较大的颗粒杂质,在进行取样时,颗粒较大的杂质易堵塞在绞龙55进料位置处,通电弹簧通电收缩,牵引弹动板53缩至连通腔52内部,绞龙55转动至连通腔52另一侧后对挤压钮进行挤压,挤压钮受挤压嵌入弹性腔内部,挤压钮上的绝缘板插入开关金属片组中间,使相互接触的两个开关金属片隔开,对通电弹簧供给电力的电路断开,弹动板53在弹出的通电弹簧作用下快速转动打开,对另一侧堵塞在绞龙55进料位置处的杂质进行敲击,使杂质从该位置处脱离,不妨碍绞龙55的正常下挖操作,弹动板53弹出过程中牵引连接在弹动板53三个侧面上的封堵布进行移动,使连接封堵布的牵引弹簧拉伸,固体颗粒不会进入弹性槽51内部对弹动板53
的活动造成阻碍,绞龙55从挤压钮位置处转动离开后,挤压钮在复位弹簧作用下弹出,使开关金属片组的两个开关金属片再次相互接触,电路对通电弹簧进行电力供给,使弹动板53在通电弹簧牵引下进行复位,封堵布在牵引弹簧作用下进行复位;
45.取样管3下端插入盛装固体颗粒的容器内部,且取样管3下端与容器底部保持水平时,伸缩管下段41内部的旋转轴54通过挤压向上移动,移动过程中与连接环套65接触并带动连接环套65在活动槽66内部向上进行位置的滑动,连接环套65向上移动带动输气挡板68跟随向上移动,连接环套65上升至最大高度后,输气挡板68上的连通孔69对准吸气孔67位置处,输气孔61的上端通过输气管63与外界连通,使吸气设备可通过输气管63吸取外界气体至伸缩管下段41位置处,吸入的气体携带伸缩管下段41内部的固体颗粒向上进行移动,达到取样的效果;
46.自动化取样系统传递信号控制液压总箱进行取样管3的收缩时,自动化取样系统的数据处理模块可通过回流至液压总箱内部的液体量计算得出取样管3回缩的长度,根据拉动齿轮64的半径大小可计算出拉动齿轮64的周长大小,取样管3回缩的长度大小除以拉动齿轮64的周长大小,得到拉动齿轮64的转动圈数大小,由此可计算出拉动齿轮64的转动角度大小,并将该数据传递给步进电机控制器,控制连接拉动齿轮64的连接轴进行对应角度大小的转动,使取样管3在进行收缩时,输气管63可在拉动齿轮64的带动下向外移出相同的长度大小,取样管3内部的输气管63始终保持笔直的状态,不会因松散影响取样管3内部固体颗粒的正常输送,溢出的输气管63不会发生折叠和挤压的情况,不影响输气管63继续向取样管3内部进行气体的输送,自动化取样系统传递信号控制液压总箱进行取样管3的伸长时,输气管63同步向取样管3内部进行移动。
47.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。