技术特征:
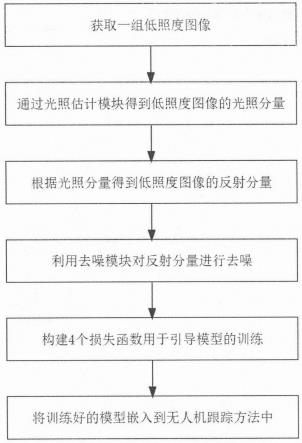
1.一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于:所述增强方法作为预处理步骤用于现有的无人机跟踪算法;所述增强方法的低照度增强模型为基于retinex理论的深度学习网络模型,包括一个光照估计模块和一个去噪模块,先用光照估计模块估计低照度图像的光照分量,再根据retinex理论得到低照度图像的反射分量,最后通过去噪模块去除反射分量中的噪声,从而得到增强结果。2.根据权利要求1所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于:所述增强方法模型的训练包含以下步骤:步骤s1、获取一组低照度图像,用于训练低照度图像增强模型;步骤s2、通过光照估计模块得到低照度图像的光照分量;步骤s3、根据图像的光照分量得到低照度图像的反射分量;步骤s4、利用去噪模块对其进行去噪;步骤s5、构建4个损失函数用于引导整个模型的训练过程;步骤s6、将训练好的模型嵌入到无人机跟踪算法中,将增强操作作为跟踪算法的预处理步骤,以对跟踪的视频帧图像进行低照度增强。3.根据权利要求2所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于,所述步骤s1中,获取低照度图像的方法为:从公开数据集darkface中获取1000张低照度图像,并将图像的大小调整为600
×
400像素。4.根据权利要求2所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于,所述步骤s2中,光照估计模块一共包含3层输入特征尺寸为600
×
400
×
3大小、输出尺寸为600
×
400
×
3的卷积神经网络,具体结构如下:第一卷积层、第二卷积层的卷积核大小为3
×
3、输入通道数为3、输出通道数为3、步长为1、填充为1,卷积之后为批归一化层和relu激活层;第三卷积层的卷积核大小为3
×
3、输入通道数为3、输出通道数为3、步长为1、填充为1,卷积之后为sigmoid激活层。5.根据权利要求2所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于,所述步骤s3中,获得反射分量的公式为:其中,r表示低照度图像的反射分量,y代表输入的低照度图像,i代表低照度图像的光照分量,表示元素除。6.根据权利要求2所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于,所述步骤s4中,去噪模块包括6层卷积神经网络,先将大小为600
×
400的低照度图像输入到第一层,输出特征尺寸为600
×
400
×
16大小,然后经过4层输入尺寸为600
×
400
×
16、输出尺寸为600
×
400
×
16的卷积网络,最后把第3层的输出结果和第5层的输出结果进行相加操作,将相加后的结果输入到最后一层,输出结果为600
×
400
×
3大小的增强图像,所述去噪模块中包含的6层卷积神经网络的具体结构如下:第一卷积层的卷积核大小为3
×
3、输入通道数为3、输出通道数为16、步长为1、填充为1,卷积之后为批归一化层和relu激活层;第二到第五卷积层的卷积核大小为3
×
3、输入通道数为16、输出通道数为16、步长为1、填充为1,卷积之后为批归一化层和relu激活层;
第六卷积层的卷积核大小为3
×
3、输入通道数为16、输出通道数为3、步长为1、填充为1,卷积之后为sigmoid激活层。7.根据权利要求2所述的一种基于retinex理论的夜间无人机跟踪低照度图像增强方法,其特征在于,所述步骤s5中,构建的损失函数共有4个,包括以下步骤:首先构建语义保真度损失函数,用于抑制图像语义信息的退化,将mse损失函数作为语义保真度损失,其公式如下所示:其中,t代表迭代次数,u
t
代表通过光照估计模块得到的光照图;然后构建光照平滑度损失函数,所述光照平滑度损失函数用于保持光照图相邻像素之间的平滑度,使用一范数来保持光照图的平滑度,其公式可以表述为:其中,n代表光照图的像素数量,n(p)代表5
×
5大小的窗口中p的邻近元素,w
p,q
表示权重,其计算公式为c表示yuv颜色通道,在用所述光照平滑度损失函数进行操作之前,先将rgb图像转换为yuv图像;接着构建去噪损失函数,以去除反射图中的噪声,它的公式可以表述为:其中,代表一阶微分运算符,r
t
代表低照度的图像反射分量;最后构建颜色强度损失函数,为了避免出现颜色失真的问题,需要限制图像rgb通道中每个通道的颜色强度,它的公式如下所示:其中,h和w是图像的高度和宽度,(m,n)代表颜色通道的集合,其值为{(r,g),(r,b),(b,g)},i
m
代表m通道的颜色强度;训练的总损失函数可以表述为为:l=λ1l
sem
λ2l
ill
λ3l
den
λ4l
col
ꢀꢀꢀꢀꢀꢀ
(6),其中,λ表示每个损失函数的权重值。
技术总结
本发明属于低照度图像增强技术领域,公开了一种基于Retinex理论的夜间无人机跟踪低照度图像增强方法,包括:首先,获取一组低照度图像,用于训练低照度图像增强模型;通过光照估计模块得到低照度图像的光照分量;根据图像的光照分量得到低照度图像的反射分量;利用去噪模块对其进行去噪;构建4个损失函数用于引导整个模型的训练过程;将训练好的模型嵌入到无人机跟踪算法中,将增强操作作为跟踪算法的预处理步骤,以对跟踪的视频帧图像进行低照度增强。本发明利用低照度图像增强算法作为无人机跟踪算法的预处理步骤,可以有效促进无人机在夜间低光场景中的跟踪能力。夜间低光场景中的跟踪能力。夜间低光场景中的跟踪能力。
技术研发人员:何龙杰 郑洪源
受保护的技术使用者:南京航空航天大学
技术研发日:2022.09.30
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。