1.本发明涉及中压电流开关装置的领域,即对于高于1kv且范围通常高达52kv的电压,以及1000到3000安培数量级的电流。特别地,本发明涉及开关装置(或断路装置),其中通过断开与电路的主分支串联布置的真空断路器来执行电流开合。
背景技术:
2.真空断路器包括联接到控制杆的活动电极。控制杆联接到控制杠杆。控制杠杆可在两个端部位置之间移动,限定了恒定的致动行程。在两个端部位置,控制杠杆被锁定,然后根据预期动作,断开或闭合开关装置,被解锁。通过致动控制杠杆,杆被移动并且将活动电极与固定电极分离或者将它们移动到一起,这断开或闭合电路。
3.当电路闭合时,必须在真空断路器的两个电极之间确保足够的接触压力,以便抵抗由于电流流动而在它们之间存在的排斥力。
4.为了确保该接触压力,在控制杠杆和杆之间的运动连杆中存在至少一个弹簧,并且控制杠杆的行程大于用于确保真空断路器的电极之间接触的最小行程。因此,超程允许弹簧被压缩,从而施加所需的最小接触压力。这种超程发生在控制杠杆和控制杆之间的连杆机构中。此外,获得真空断路器的电极之间的接触所需的行程随着时间而变化,特别是由于触点的腐蚀以及开关装置使用过程中的机构磨损。结果,产生接触压力的弹簧的压缩量也发生变化,从而导致接触压力在产品的整个寿命期间发生变化。
5.为了能够通知需要对设备进行维护操作或更换设备,在产品的整个使用过程中能够确定真空断路器电极之间的压力是很重要的。控制杠杆和控制杆之间的超程与接触压力直接相关。因此,能够监控该超程非常重要。为此,一些制造商选择将弹簧布置在控制杠杆和控制杆之间。这种布置有助于在带电区域外接取和看到所述超程,并且使得安装位置传感器以监控所述超程变得简单。
6.然而,有利的是能够最小化布置在接触压力弹簧和移动触点之间的开关装置的移动部件的重量,以便获得更好的电路断开性能。一些制造商于是选择将弹簧布置在控制杆处,从而允许在尽可能靠近活动电极的位置产生期望的接触压力。允许弹簧的压下的超程于是不再明显,这使得安装位置传感器不再简单。
7.本发明的目的是提供一种解决方案,该解决方案使得能够最小化移动部件的重量,同时仍然使得能够在开关装置的整个使用过程中容易地监控超程。
技术实现要素:
8.为此,本发明提供了一种用于切换中压电路的装置,包括:
[0009]-真空断路器,包括固定电极和活动电极,
[0010]-致动杠杆,连接到活动电极,该致动杠杆可在称为断开位置的第一位置和称为闭合位置的第二位置之间移动,在第一位置,活动电极和固定电极分开断开距离,在第二位置,活动电极和固定电极接触,以允许电流流过电路,
[0011]
致动杠杆从第一位置移动到第二位置限定了位移行程,
[0012]-绝缘体,联接到致动杠杆,
[0013]-压缩器件,在活动电极和绝缘体之间施加排斥力,
[0014]
其中,致动杠杆的行程大于断开距离,开关装置包括:
[0015]-指示器柄,机械联接到活动电极,其被配置为当致动杠杆处于闭合位置时至少部分延伸出绝缘体之外。
[0016]
由于指示器柄联接到活动电极,所以指示器柄的位置代表活动电极的位置。指示器柄的位置可以容易地确定,因为所述指示器柄的至少一部分位于绝缘体外部,因此可以容易地接取。因此,可以容易地确定活动电极的位置。因此,可以检查移动的幅度是否允许在真空断路器的电极之间施加足够的接触压力。在由于电极触点的腐蚀、这种接触压力不足的情况下,可以触发报警信号。也可以采取纠正措施。例如,开关装置可能被调整,以便返回到机械联接到活动电极的控制配件的足够的移动幅度。
[0017]
以下段落中列出的特征可以彼此独立地实现,或者以任何技术上可能的组合来实现:
[0018]
指示器柄被配置为指示活动电极和绝缘体之间的距离。
[0019]
指示器柄被配置为指示致动杠杆相对于固定电极和活动电极之间的断开距离的超程。
[0020]
根据一个实施例,指示器柄刚性联接到活动电极。
[0021]
优选地,指示器柄与活动电极电绝缘。
[0022]
根据开关装置的一个实施例,指示器柄是电绝缘的。
[0023]
指示器柄由环氧树脂或聚酯制成。
[0024]
根据一个实施例,开关装置包括固定到活动电极的控制配件,并且压缩器件在控制配件和绝缘体之间施加排斥力,以便当活动电极与固定电极分离时将控制配件压靠在绝缘体上。
[0025]
压缩器件是弹性返回器件。例如,压缩器件是弹簧。弹簧可以是螺旋弹簧。
[0026]
活动电极可沿纵向轴线平移移动。
[0027]
致动杠杆可绕横向轴线转动。横向轴线垂直于纵向轴线。
[0028]
绝缘体包括用于容纳控制配件的隔室。
[0029]
容纳隔室沿着纵向轴线延伸。
[0030]
压缩器件在控制配件和绝缘体之间施加返回力,以便当活动电极与固定电极分离时,将控制配件压靠在容纳隔室中的止挡件上。
[0031]
压缩器件是沿纵向轴线延伸的螺旋弹簧。
[0032]
止挡件包括用于控制配件的移动的孔洞。
[0033]
止挡件横向于纵向轴线延伸。
[0034]
控制配件包括肩部,该肩部构造成支承抵靠止挡件。
[0035]
根据开关装置的一个实施例,绝缘体沿着纵向轴线延伸,指示器柄平行于纵向轴线。
[0036]
根据开关装置的一种实施方式,指示器柄穿过绝缘体。
[0037]
例如,指示器柄容纳在绝缘体的移动通道中。
[0038]
指示器柄与绝缘体同轴。
[0039]
开关装置可以包括径向包括在指示器柄和绝缘体中的移动通道之间的密封件。
[0040]
密封件可以是o形环。
[0041]
o形环被压缩在指示器柄和绝缘体中的移动通道之间。压缩率大于或等于5%。
[0042]
该密封件可以是唇形密封件。该密封件例如是方形密封圈。
[0043]
移动通道与绝缘体同轴。
[0044]
移动通道包括具有第一直径的第一圆柱形部分。通道包括具有第二直径的第二圆柱形部分,第二圆柱形部分的第二直径大于第一圆柱形部分的第一直径。
[0045]
指示器柄包括径向包括在指示器柄和第二圆柱形部分之间的密封件。
[0046]
根据一个实施方式,开关装置包括径向包括在指示器柄和第二圆柱形部分之间的两个密封件,这两个密封件沿着指示器柄轴向偏移。
[0047]
指示器柄包括具有第三直径的第一圆柱形部分和具有第四直径的第二圆柱形部分,第四直径大于第三直径。
[0048]
移动通道的第二圆柱形部分通向用于容纳压缩器件的隔室。
[0049]
压缩器件围绕移动通道的第二圆柱形部分。
[0050]
根据开关装置的一个实施例,绝缘体联接到控制板,该控制板包括沿着横向于纵向轴线的轴线延伸的枢轴,
[0051]
致动杠杆联接到控制板的枢轴,
[0052]
绝缘体通过螺杆-螺母调节系统联接到控制板,该螺杆-螺母调节系统被配置为调节绝缘体相对于控制板的相对位置,以便当致动杠杆处于第一位置时调节活动电极和固定电极之间的断开距离,
[0053]
指示器柄穿过螺杆-螺母调节系统。
[0054]
绝缘体布置在活动电极和调节系统之间。
[0055]
根据开关装置的一个实施例,指示器柄在绝缘体的径向外部。
[0056]
指示器柄可以包括圆柱形部分和横向于圆柱形部分延伸的一组翅片。
[0057]
翅片是盘形的。
[0058]
翅片沿着指示器柄的圆柱形部分偏移。
[0059]
两个连续翅片之间的距离是恒定的。
[0060]
指示器柄通过连杆连接到控制配件。
[0061]
连杆沿横向方向延伸。
[0062]
例如,连杆和指示器柄形成一件式组件。
[0063]
根据开关装置的一个实施例,指示器柄穿过引导板。
[0064]
引导板横向于指示器柄延伸。
[0065]
引导板紧固到控制板。
[0066]
根据一种实施方式,指示器柄的一部分面向刚性联接到控制板的位置传感器。
[0067]
指示器柄包括磁性目标。
[0068]
磁性目标布置在指示器柄的轴向端部。
[0069]
磁性目标是永久磁铁。
[0070]
位置传感器是霍尔效应传感器。
[0071]
当致动杠杆处于断开位置时,指示器柄的轴向端与用于指示器柄的移动的孔洞的边缘齐平。
附图说明
[0072]
通过阅读下面提供的描述和检查附图,其它特征、细节和优点将变得显而易见,在附图中:
[0073]
图1是根据本发明第一实施例的开关装置的横截面视图,
[0074]
图2是图1的开关装置的另一横截面视图,
[0075]
图3是图1的开关装置的局部横截面视图,
[0076]
图4是图1的开关装置的另一个局部横截面视图,
[0077]
图5是根据本发明第二实施例的开关装置的横截面视图,
[0078]
图6是图5的开关装置的局部横截面视图,
[0079]
图7是根据本发明第一实施例的开关装置的透视图。
具体实施方式
[0080]
为了附图的易读性,各种元件不一定按比例示出。在附图中,相同的元件用相同的附图标记表示。某些元件或参数可以被索引,即由例如第一元件或第二元件,或者甚至第一参数和第二参数等来指定。这种索引的目的是区分相似但不相同的元件或参数。这种索引并不意味着一个元件或参数优先于另一个元件或参数;可以互换名称。当规定子系统包括给定元件时,这并不排除该子系统中存在其他元件。类似地,当规定子系统包括给定元件时,应理解该子系统至少包括该元件。
[0081]
图1示出了用于切换中压(即从1到52kv)电路30的开关装置50。开关装置50包括串联布置在电路30中的真空断路器1。
[0082]
真空断路器1包括固定电极2和活动电极3。固定电极2沿着纵向x轴线延伸。固定电极2和活动电极3是同轴的。每个电极2、3包括横向于纵向x轴线延伸的盘形部分。活动电极3的盘形部分可以与固定电极2的盘形部分接触,以便允许电流在电极之间流动,并因此通过真空断路器1。活动电极3可沿着纵向x轴线平移移动。
[0083]
致动杠杆4允许控制真空断路器1的断开和闭合,从而控制电路30的断开和闭合。致动杠杆4可围绕横向y轴线平移移动。横向y轴线垂直于纵向x轴线。
[0084]
控制板11包括枢轴12,该枢轴12沿着横向于纵向x轴线的轴线y1延伸。致动杠杆4联接到控制板11的枢轴12。绝缘体5固定到控制板11。更准确地说,绝缘体5刚性联接到控制板11。绝缘体5使控制板11与电路30的电压绝缘。致动杠杆4包括两个彼此连接的平行臂40a、40b。图7详细描述了装置的这一方面。
[0085]
本发明提供了一种用于切换中压电路30的装置50,包括:
[0086]-真空断路器1,包括固定电极2和活动电极3,
[0087]-致动杠杆4,联接到活动电极3,致动杠杆4可在称为断开位置p1的第一位置和称为闭合位置p2的第二位置之间移动,在第一位置,活动电极3和固定电极2分开断开距离d1,在第二位置,活动电极3和固定电极2接触,以允许电流流过电路30,
[0088]
致动杠杆4从第一位置p1移动到第二位置p2,其限定位移行程c1,
[0089]-绝缘体5,联接到致动杠杆4,
[0090]-压缩器件7,在活动电极3和绝缘体5之间施加排斥力,
[0091]
其中,致动杠杆4的行程c1大于断开距离d1,开关装置包括:
[0092]-指示器柄8,机械联接到活动电极3,其被配置为当致动杠杆4处于闭合位置p2时至少部分地延伸出绝缘体5。
[0093]
致动杠杆4的行程c1和断开距离d1之间的差值称为超程。这种超程允许在固定电极2和活动电极3之间存在接触压力。致动杠杆4的行程c1大于断开距离d1,使得当致动杠杆4处于闭合位置p2时,活动电极3远离绝缘体5。术语“远离”被理解为当致动杠杆4处于闭合位置p2时和当致动杠杆4处于断开位置p1时,活动电极3和绝缘体5之间沿x轴线的距离是不同的。
[0094]
真空断路器1的电极之间的断开距离d1在图1中标出。致动杠杆4的行程c1如图2所示。图1对应于致动杠杆4的断开位置p1,图2对应于闭合位置p2。为了简化绘图,致动杠杆4的移动幅度已被夸大。当闭合电路30时,致动杠杆4在控制杆(未示出)的作用下围绕y轴线枢转,该控制杆通过致动杠杆4中的孔34插入。因此,控制杆穿过致动杠杆4的每个臂40a、40b。杠杆4的移动幅度c1由控制杆机构的构造确定。该移动幅度c1是固定的。致动杠杆4的移动幅度c1被选择为大于使活动电极3和固定电极2靠近所需的行程。因此,致动杠杆4从断开位置p1到闭合位置p2的移动允许压缩器件7被压缩。当然,可以在控制杆和致动杠杆4之间实现其他类型的运动连接。断开距离d1在8毫米和20毫米之间。
[0095]
由于指示器柄8联接到活动电极3,指示器柄8的位置代表活动电极3的位置。指示器柄8的位置可以容易地确定,因为所述指示器柄8的至少一部分位于绝缘体5的外部,因此可以容易地接取。因此,可以容易地确定活动电极3的位置。指示器柄8被配置为指示致动杠杆4相对于固定电极2和活动电极3之间的断开距离d1的超程s。基于该信息,可以检查致动杠杆4的移动幅度允许压缩器件7的充分压缩,并因此允许在真空断路器1的电极2、3之间施加充分的接触压力。因此,在产品使用寿命期间,超程s的任何减少都是可以测量的。在这种接触压力不足的情况下,特别是由于使用开关装置50时电极2、3的触点的腐蚀,可以触发报警信号。也可以采取纠正措施。例如,开关装置可以被调整以返回到足够的超程,从而允许足够的接触压力。
[0096]
指示器柄8被配置为指示活动电极3和绝缘体5之间的距离,该距离等于超程s。活动电极3和绝缘体5之间的距离是沿着真空断路器1的活动电极3的x轴线测量的。
[0097]
在所示的示例中,指示器柄8刚性联接到活动电极3。“刚性连接”被理解为指示器柄8和活动电极3的相对定位在代表开关装置50正常使用的机械负载下是不变的。包括至少一个关节的运动连杆也是可以设想的。
[0098]
指示器柄8与活动电极3电绝缘。在所示的示例中,指示器柄8是电绝缘的。指示器柄8例如由热塑性材料制成。指示器柄8例如也可以由环氧树脂或聚酯制成。绝缘体5沿着纵向x轴线延伸,指示器柄8平行于纵向x轴线。指示器柄8的直径在2到5毫米之间。
[0099]
根据所示的实施例,开关装置50包括固定到活动电极3的控制配件6,并且压缩器件7在控制配件6和绝缘体5之间施加排斥力,以便当活动电极3与固定电极2分离时,将控制配件6压靠绝缘体5。更准确地说,压缩器件7在控制配件6和绝缘体5之间施加排斥力,以便当活动电极3与固定电极2分离时,将控制配件6压靠在止挡件16上。
[0100]
压缩器件7是弹性返回器件。压缩器件7在这里是弹簧。更准确地说,压缩器件7在这里是螺旋弹簧。在所示的示例中,压缩器件7在这里是沿着纵向x轴线延伸的螺旋弹簧。根据一种变型(未示出),压缩器件可以是贝氏垫圈的堆叠体,或者任何其它可以想到的压缩器件。
[0101]
绝缘体5包括用于容纳控制配件6的隔室15。控制配件6容纳在容纳隔室15中。容纳隔室15沿着纵向x轴线延伸。
[0102]
压缩器件7在控制配件6和绝缘体5之间施加返回力,以便当活动电极3与固定电极2分离时,将控制配件6压靠在容纳隔室15中的止挡件16上。换句话说,当活动电极3不对固定电极2施加力时,控制配件6被弹簧7推靠在止挡件16上。这种配置如图1所示。
[0103]
止挡件16可以是添加并紧固到绝缘体5的部件。止挡件16包括用于控制配件6移动的孔洞29。止挡件16呈环形冠部的大致形状,在其中心具有孔洞。止挡件16横向于纵向x轴线延伸。
[0104]
控制配件6包括肩部28,该肩部28被构造成支承抵靠止挡件16。控制配件6通过螺纹元件26固定到活动电极3。其他紧固器件也可以用于将活动电极3和控制配件6紧固在一起。电路30的电连接端子27布置在控制配件6和活动电极3之间。在各个附图所示的示例中,螺纹元件26穿过电连接端子27。
[0105]
当闭合电路30时,致动杠杆4围绕y轴线枢转。因此,活动电极3移动得更靠近固定电极2。在活动电极3和固定电极2之间存在距离的整个阶段,压缩器件7保持控制配件6压靠在止挡件16上。一旦杠杆4移动得足够远,活动电极3就与固定电极接触。杠杆4继续运动。
[0106]
随着致动杠杆4从固定电极2与活动电极3接触的位置移动到对应于致动杠杆4的最大行程的位置,压缩器件7的压缩程度逐渐增加。控制配件6停止被压靠在止挡件16上,并沿纵向x轴线的方向远离止挡件16移动。杠杆4的剩余的移动行程压缩压缩器件7。压缩行程的幅度决定了由压缩器件7施加的负载,因此,一旦致动杠杆4已经到达其最大移动位置p2,固定电极2和活动电极3之间存在接触压力。当控制配件6抵靠止挡件16时,压缩器件7可以处于相对于其自由长度被压缩的状态。该初始预载允许存储在由致动杠杆4的超程提供的压缩变化中的势能增加。优选地,超程s在2到5毫米之间。
[0107]
当致动杠杆4处于闭合位置p2时,控制配件6远离止挡件16。
[0108]
在本配置中,致动杠杆4联接到控制板11,控制板11本身联接到绝缘体5。活动电极3联接到控制配件6,并且压缩器件7支承抵靠绝缘体5和控制配件6。这种配置允许固定到活动电极3的移动部件的重量最小化。因此,当断开真空断路器时,存储在压缩器件7中的弹性能量以比一些制造商选择的一些解决方案更低的重量呈现,这允许活动电极3被给予更好的动量。因此,更可靠地确保了电路30的断开。
[0109]
根据图1至图4所示的第一实施例,指示器柄8穿过绝缘体5。
[0110]
为此,以及特别如图3所示,指示器柄8容纳在绝缘体5的移动通道9中。这里,移动通道9与绝缘体5同轴。因此,在该第一实施例中,指示器柄8与绝缘体5同轴。
[0111]
如图3所示,开关装置50可以包括密封件10,该密封件10径向包括在指示器柄8和绝缘体5中的移动通道9之间。密封件10在这里是o形环。o形环被压缩在指示器柄8和绝缘体5中的移动通道9之间。压缩率大于或等于5%。“密封件的压缩率”被理解为处于自由状态的密封件的直径和处于安装在移动通道9中的状态的密封件的直径之间的差与处于自由状态
的密封件的直径之间的商。换句话说,密封件的压缩率是(自由直径-安装直径)/自由直径。根据一种变型(未示出),密封件10可以是唇形密封件。密封件10例如是方形密封圈。密封件10改善了活动电极3和与活动电极3相对的柄8的端部之间的电绝缘。具体而言,密封件10限制了电弧沿着移动通道9行进的风险。
[0112]
更准确地说,移动通道9包括具有第一直径d1的第一圆柱形部分17。通道包括具有第二直径d2的第二圆柱形部分18,第二圆柱形部分18的第二直径d2大于第一圆柱形部分17的第一直径d1。直径d1在3毫米和8毫米之间。第二直径d2在5到20毫米之间。
[0113]
指示器柄8包括径向包含在指示器柄8和第二圆柱形部分18之间的密封件10。更具体地说,如图4所示,开关装置50包括两个密封件10、10’,这两个密封件10、10’径向包括在指示器柄8和第二圆柱形部分18之间,这两个密封件10、10’沿指示器柄8轴向偏移。连续的两个密封件的存在允许电绝缘被进一步改善。作为一种变型,三个或更多个密封件可以沿着柄8的轴线连续布置。作为另一种变型,可以只有一个密封件。指示器柄8包括具有第三直径d3的第一圆柱形部分19和具有第四直径d4的第二圆柱形部分20,第四直径d4大于第三直径d3。指示器柄8的第二部分20形成柄8的肩部。
[0114]
移动通道9的第二圆柱形部分18通向用于容纳压缩器件7的隔室15。因此,移动通道9的轴向端部36通向容纳隔室15。在该第一实施例中,压缩器件7围绕移动通道9的第二圆柱形部分19。
[0115]
绝缘体5联接到控制板11上,控制板11包括沿着横向于纵向轴线x的轴线y1延伸的枢轴12,
[0116]
致动杠杆4联接到控制板11的枢轴12上,
[0117]
绝缘体5通过螺杆-螺母调节系统35联接到控制板11,螺杆-螺母调节系统35被配置为调节绝缘体5相对于控制板11的相对位置,以便当致动杠杆4处于第一位置p1时调节活动电极3和固定电极2之间的断开距离d1。调节系统35在图4中详细示出。指示器柄8穿过螺杆-螺母调节系统35。更准确地说,调节系统35允许调节触点超程s。
[0118]
绝缘体5布置在活动电极3和调节系统35之间。调节系统35包括外部带螺纹的护套23,该护套23被配置成在联接到控制板11的螺纹孔24内移动,并且包括螺母25,该螺母25被配置成将护套23锁定在适当位置。因此,调节系统35允许调节触点超程s,从而当致动杠杆4处于断开位置p1时,调节真空断路器1的电极2、3之间分开的距离d1。
[0119]
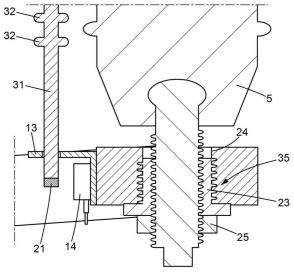
图5和图6示出了第二实施例。根据开关装置50的该第二实施例,指示器柄8在绝缘体5的径向外部。
[0120]
指示器柄8可以包括圆柱形部分31和横向于圆柱形部分延伸的一组翅片32。翅片32是盘形的。翅片32沿着指示器柄11的圆柱形部分31偏移。在所示的示例中,两个连续翅片32之间的距离是恒定的。
[0121]
这里,指示器柄8通过连杆33连接到控制配件6。连接杆33沿横向方向t延伸。这里,横向方向t垂直于x轴线和y轴线。连杆33和指示器柄8可以形成一件式组件。指示器柄8面向绝缘体5的外径向表面37。根据一个实施例(未示出),指示器柄8通过连杆33连接到活动电极3。
[0122]
指示器柄8穿过引导板13。引导板13横向于指示器柄8延伸。引导板13紧固到控制板11。
[0123]
引导板13可以作为视觉参考,用于确定指示器柄8的轴向端部的位置。具体地说,指示器柄8突出引导板13之外的部分的长度可由操作者通过目视检查直接测量。
[0124]
根据这两个实施例,指示器柄8的一部分面向刚性联接到控制板11的位置传感器14。对于一些类型的传感器,例如霍尔效应传感器,指示器柄8包括磁性目标21。位置传感器14可以通过附接凸耳38附接到控制板11。根据一个变型实施例(未示出),位置传感器14可以刚性地联接到绝缘体5。
[0125]
磁性目标21布置在指示器柄8的轴向端部22。磁性目标21例如是永磁体。位置传感器14可以是霍尔效应传感器。也可以使用磁阻传感器。如图4的a部分示意性所示,当致动杠杆4处于断开位置p1时,指示器柄8的轴向端部22可以与用于指示器柄8的移动的孔洞的边缘齐平。图4的b部分示意性地示出了当致动杠杆4处于闭合位置p2时指示器柄8的位置。这两个位置之间的差值等于致动杠杆4相对于固定电极2和活动电极3之间的断开距离d1的超程s。该差值也等于在致动杠杆4的整个闭合行程中弹簧7的压缩量的变化。
[0126]
因此,当致动杠杆4处于断开位置p1时,以及当致动杠杆4处于闭合位置p2时,电子监控单元(未示出)可以测量指示器柄8的位置。两个测得的位置之间的差值等于弹簧7的压缩行程。因此,计算两个位置之间的差值使得可以检查由弹簧7的压缩提供的接触压力是否足够。当经由采集链对固定在指示器柄8上的磁性目标21的位置进行测量时,当发现的值低于预定阈值时,可以发出自动警告信号。因此可以采取校正措施,例如调节调节系统35。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。