1.本实用新型属于机械手爪技术领域,具体涉及一种可伸长手爪。
背景技术:
2.在工业4.0的背景下,机械行业在逐步向自动化,信息化,智能化,数字化迈进。在产线的自动化改造中,越来越多各式各样的手爪得到设计与应用,在形式上有v型手爪,圆弧型手爪;实现方式上有外夹式,内撑式,杠杆式;在结构上有90度直角布置,平面布置,梯形布置等,但大多数均为固定式手爪,靠机器人或者桁架等运动机构完成各类动作姿态。
3.对于上述手爪结构形式,针对一些上下料空间狭小的机床,存在机器人关节可能会与机床干涉,导致机器人本体无法进入机床完成上下料的问题。
技术实现要素:
4.本实用新型的目的在于提供一种可伸长手爪,以克服现有技术的不足。
5.一种可伸长手爪,包括左伸长组件、右伸长组件和用于固定左伸长组件、右伸长组件的固定架,左伸长组件包括左安装板,左安装板的前端下方安装有左气爪,左安装板后端固定连接有左线规,左线规上方设置有左滑块,左安装板的右侧部分下方固定有左连接板,左连接板通过左浮动接头连接有左气缸,右伸长组件包括右安装板,右安装板前端下方安装有右气爪,右安装板后端固定有右线规,右线规上方设置有右滑块,右安装板的左侧部分上方固定有右连接板,右连接板通过右浮动接头连接有右气缸。
6.进一步的,固定架包括法兰板、后侧板、前侧板、左侧板、右侧板与底板,法兰板和底板分别与后侧板、前侧板、左侧板、右侧板固定连接。
7.进一步的,左安装板和右安装板的前端均开有圆形通孔和用于固定连接用的通孔。
8.进一步的,左安装板和右安装板均为弯折结构,弯折部分的安装板与两端的安装板垂直。
9.进一步的,每侧伸长组件包括两条线规,线规上开有通孔,左线规的一端和右线规的一端均固定连接在安装板的弯折部分。
10.进一步的,左滑块上方固定连接有法兰板,左滑块中间部分和右滑块中间部分均开有与线规相配合的凹槽,右滑块固定连接在底板上。
11.进一步的,左气缸固定在左气缸安装板上,右气缸固定在右气缸安装板上。
12.进一步的,左气缸安装板安装固定在前侧板上,右气缸安装板安装固定在后侧板上。
13.进一步的,右伸长组件的右安装板弯折部分与右安装板的后端部分之间设置有加强筋。
14.进一步的,左伸长组件和右伸长组件水平高度相同,左气爪和右气爪平齐,左气缸与左浮动接头设置在固定架中,右气缸与右浮动接头设置在固定架中,固定架位于左安装
板与右安装板之间。
15.与现有技术相比,本实用新型具有以下有益的技术效果:
16.本实用新型一种可伸长手爪,包括左伸长组件,右伸长组件和用于固定左伸长组件,右伸长组件的固定架,伸长组件包括安装板,在安装板的前端下方安装有气爪,安装板后端与线规固定连接,线规上设置有滑块,气缸通过浮动接头与连接板连接,安装板与连接板之间固定连接,气缸通过连接板带动安装板与线规运动,从而带动气爪伸出完成组件的伸出动作,装置结构简单,操作方便,对于一些空间狭小,机器人关节与机床干涉,无法进入的场合,通过本机构的使用,可不用机器人本体进入而完成换料动作,扩展了机器人的适用场景。
17.优选的,滑块中间部分开有与线规相配合的通孔,线规与滑块滑动连接,线规穿过滑块与安装板的弯折部分固定连接,通过滑块与线规之间的配合,起到了导向作用,保证伸长组件向外伸展时的稳定性。
18.优选的,在法兰板上有与机器人配合连接的结构,通过与机器人的组合使用,可有效拓展机器人臂展,增长可达范围。
19.优选的,在安装板前端开有圆孔,一方面方便安装板定位孔的加工,另一方面减轻了伸长组件前端的重量,保证了伸长组件工作时的可靠性,避免因伸长组件前端过重影响使用寿命。
附图说明
20.图1为本实用新型实施例中可伸长手爪装置结构图,其中图1a为主视图、图1b为俯视图。
21.图2为本实用新型实施例中可伸长手爪装置内部结构俯视图。
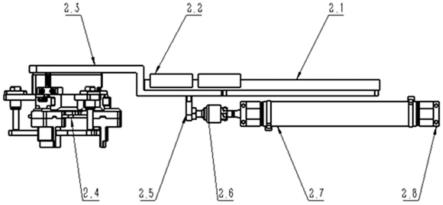
22.图3为本实用新型实施例中左伸长组件结构图。
23.图4为本实用新型实施例中右伸长组件结构图。
24.图中,1、法兰板;2、左伸长组件;3、右伸长组件;4、后侧板;5、前侧板;6、左侧板;7、右侧板;8、底板;2.1、左线规;2.2、左滑块;2.3、左安装板;2.4、左气爪;2.5左连接板;2.6、左浮动接头;2.7、左气缸;2.8、左气缸安装板;3.1、右线规;3.2、右滑块;3.3、右安装板;3.4、右气爪;3.5、加强筋;3.6、右连接板;3.7、右浮动接头;3.8、右气缸;3.9、右气缸安装板。
具体实施方式
25.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
26.如图1所示,一种可伸长手爪,其特征在于,包括左伸长组件2、右伸长组件3和用于固定左伸长组件2、右伸长组件3的固定架,左伸长组件2包括左安装板2.3,在左安装板2.3的前端下方安装有左气爪2.4,左安装板2.3后端固定连接有左线规2.1,左线规2.1上方设
置有左滑块2.2,左安装板2.3的右侧部分下方固定有左连接板2.5,左连接板2.5通过左浮动接头2.6连接有左气缸2.7,右伸长组件3包括右安装板3.4,在右安装板3.4前端下方安装有右气爪3.3,右安装板3.4后端固定有右线规3.1,右线规3.1上方设置有右滑块3.2,右安装板3.4的左侧部分上方固定有右连接板3.6,右连接板3.6通过右浮动接头3.7连接有右气缸3.8,具体的,左右侧线规上均开有多个沉孔,左线规2.1通过m4*20螺栓安装在左安装板2.3上,左连接板2.5通过m5*10螺栓安装在左安装板2.3上,右线规3.1通过m4*20螺栓安装在右安装板3.4上,右连接板3.6通过m5*10螺栓安装在右安装板3.4上,左线规2.1与左滑块2.2组成滑动副,气缸通过连接板带动安装板与线规运动,从而带动气爪伸出完成组件的伸出动作,装置结构简单,操作方便,对于一些空间狭小,机器人关节与机床干涉,无法进入的场合,通过本机构的使用,可不用机器人本体进入而完成换料动作,扩展了机器人的适用场景。
27.如图1所示,固定架包括法兰板1、后侧板4、前侧板5、左侧板6、右侧板7与底板8,法兰板1、底板8分别与后侧板4、前侧板5、左侧板6、右侧板7固定连接,具体的,法兰板1,底板8通过m5*20螺栓与后侧板4,前侧板5,左侧板6,右侧板7相连,形成一个方形基体,伸长组件后端气缸段相关结构固定在固定架内,从而利用固定架将伸长组件固定。
28.如图1所示,左安装板2.3、右安装板3.4前端开有圆形通孔及用于固定连接用的通孔,具体的,所述通孔为螺纹孔,安装板前端开有圆形通孔的作用一方面是方便了安装板定位孔的加工,另一方面减轻了伸长组件前端的重量,保证了伸长组件工作时的可靠性,避免因伸长组件前端过重影响使用寿命,左气爪2.4通过m6*50螺栓安装在左安装板2.3前端,右气爪3.3通过m6*50螺栓安装在右安装板3.4前端。
29.如图1、图3、图4所示,左安装板2.3、右安装板3.4为弯折结构,弯折部分的安装板与两侧的安装板垂直,每侧伸长组件包括两条线规,线规上开有通孔,左线规2.1的一端和右线规3.1的一端均固定连接在安装板的弯折部分,具体的,所述通孔为沉孔,每侧的伸长组件都有两条线规,线规固定在安装板的两侧,线规一端穿过滑块与安装板弯折部分固定连接,起导向作用。
30.如图1、图2所示,左滑块2.2上方固定连接有法兰板1,左滑块2.2中间部分和右滑块3.2中间部分均开有与线规相配合的凹槽,右滑块3.2固定连接在底板8上,具体的,所述通孔为螺纹孔,每侧伸长组件均包括两组滑块,每组可以有两个滑块,滑块一侧开有用于固定连接的螺纹孔,左滑块2.2通过m4*20螺栓安装固定在法兰板1上,右滑块3.2通过m4*20螺栓安装固定在底板8上,使伸长组件与固定架之间连接固定;此外,滑块的另一侧中间部分开有与线规相配合的凹槽,宽度与线规的宽度相同,通过滑块与线规之间组成滑动连接副,对伸长组件起到了导向作用,保证伸长组件向外伸展时的稳定性。
31.如图1、图3、图4所示,左气缸安装板2.8安装固定在前侧板5上,右气缸安装板3.8安装固定在后侧板4上,具体的,左气缸2.7与左气缸安装板2.8通过螺栓m5*10连接在一起,左气缸安装板2.8通过螺栓m5*15安装在前侧板5上,右气缸3.8与右气缸安装板3.9通过螺栓m5*10连接在一起,右气缸安装板3.9通过螺栓m5*15安装在后侧板4上。
32.如图4所示,右伸长组件3的右安装板3.4弯折部分与右安装板3.4的后端部分之间设置有加强筋3.5,具体的,如图4所示,右伸长组件3相比于左伸长组件2安装板的弯折部分更长,同时由于伸长组件前端的重量,这样容易导致右伸长组件3伸出时安装板的弯折部分
受力过大而变形,因此,在此处加强筋3.5可有效避免右伸长组件3伸出时安装板弯折部分可能会出现的变形。
33.如图1、图2所示,左伸长组件2和右伸长组件3水平高度相同,左气爪2.4和右气爪3.3平齐,左气缸2.7与左浮动接头3.7设置在固定架中,右气缸3.8与右浮动接头3.7设置在固定架中,固定架位于左安装板2.3与右安装板3.4之间,具体的,两侧伸长组件、左右气爪平齐,伸长组件相关气缸结构位于两安装板之间,并通过气缸安装板固定在固定架内。
34.本技术可伸长手爪可与机器人配合使用,常用于机床上下料;
35.例如法兰板1与机器人第六轴法兰相连,左气爪2.4、左气缸2.7、右气爪3.3、右气缸3.8分别由不同的电磁阀控制。具体实施过程如下:
36.上料前:机器人在行进过程中,左气缸2.7、右气缸3.8均处于收回状态,左气爪2.4夹持待加工零件,右气爪3.3空爪;
37.上下料过程:机器人行至机床处停,发出信号,机床自动门开,机器人调整姿态至机床外,右气缸3.8伸出,右气缸3.8通过右连接板3.6带动右安装板3.4与右线规3.1运动,右线规3.1穿过右滑块3.2组成的滑动副对伸长组件的伸出起导向作用,从而带动气爪伸出完成组件的伸出动作,右气爪3.3伸出取料,取料完成,右气爪3.3收回,机器人6轴旋转180
°
,同理,左气缸2.7伸出,左气爪2.4将待加工零件放至机床,上料完成,左气缸2.7收回,机器人恢复姿态;
38.下料后:左气缸2.7、右气缸3.8均处于收回状态,左气爪2.4空爪,右气爪3.3夹持加工后零件,机器人给机床发出信号,自动门关,机床开始加工,机器人进行下一道工序上下料。
39.本技术结构简单,加工方便,易于安装,灵活性高;通过与机器人组合使用,可有效拓展机器人臂展,增长可达范围;在一些空间狭小,机器人关节与机床干涉,无法进入的场合,通过本机构的使用,可不用机器人本体进入而完成换料动作,扩展了机器人的适用场景。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。