一种纳型aps太阳敏感器
技术领域
1.本发明涉及航天器姿态测量的光学姿态敏感器领域。
背景技术:
2.太阳敏感器以太阳为基准方位,测量航天器姿态与太阳光线矢量夹角的一种光学姿态敏感器。因为太阳敏感器视场大、动态性能好且太阳在太空中属于比较明显的目标,在各类航天器上太阳敏感器均有大量应用,用于辅助航天器的对日捕获、对日巡航和姿态定姿等。
3.传统的太阳敏感器主要是基于硅光电池,具有设计简单、环境适应性好等特点,输出精度适中,但多以光电流作为输出,需要后续采样处理,接口较为复杂。随着ccd和cmos图像传感器的发展,陆续出现基于ccd和cmos图像传感器的太阳敏感器,多采用一体化设计,其具有精度高、接口简单等特点,但是由于需要fpga、dsp或单片机等处理器导致产品体积和功耗均较大。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提供一种纳型aps太阳敏感器。
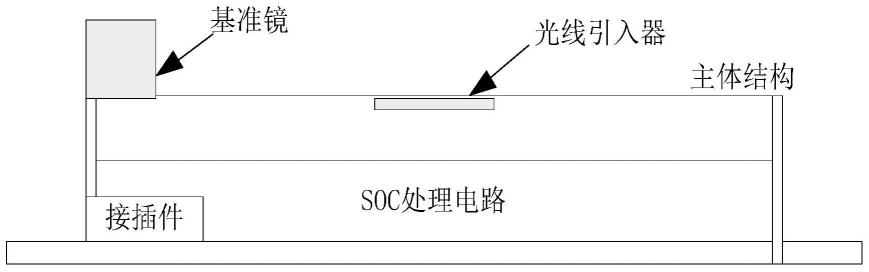
5.本发明解决技术的方案是:一种纳型aps太阳敏感器,包括:光线引入器、soc处理板、主体结构和基准镜;
6.其中,光线引入器、soc处理板和基准镜安装在所述主体结构上;所述基准镜用于表征纳型aps太阳敏感器本体坐标系;所述光线引入器采用十字光缝实现太阳光强的衰减和太阳光线的引入,soc处理板实现光电转换、图像采集和图像处理,并通过接口输出太阳方位信息。
7.优选的,所述的光线引入器利用mems技术实现镀膜和光刻。
8.优选的,所述的光线引入器在基板玻璃上表面设计三层膜,从玻璃基板由内到外分别是减反膜、中性衰减膜和减反膜;基板玻璃下表面设计窄带衰减膜和减反膜,十字光缝刻在减反膜上。
9.优选的,所述减反膜保证膜层反射率小于2%,中性衰减膜透过率为1/15000,窄带衰减膜通过波段为800nm
±
5nm。
10.优选的,所述十字光缝的光缝宽度范围10um~12um。
11.优选的,所述的soc处理板包括图像传感器、soc器件、rs422接口器件和内部电源转换dc-dc;
12.内部电源转换dc-dc实现外部5v电源的转换,转换为3.3v、1.5v和2.8v,向soc器件和图像传感器提供电源;所述soc器件内置逻辑资源实现图像传感器的控制、图像采集、太阳亮斑提取,soc器件内置arm cortex-m3内核资源实现两轴太阳角度的计算;
13.上电复位利用rc电路和74lvc2g14非门实现,用于soc器件的外部上电复位。
14.优选的,arm cortex-m3内核资源利用十字光缝的中心点实现两个轴的太阳角度
计算,利用四个边缘点辅助单轴太阳角度计算,当光缝出现污染时,通过四个边缘点分别输出两轴太阳角度。
15.优选的,正常情况下,利用十字光缝的中心点计算的两轴太阳角度(α
中心
,β
中心
)作为太阳敏感器输出;为提升可靠性,将α
中心
,与边缘点计算的单轴太阳角度α
边缘1
和α
边缘3
进行比对,采取3取2方式输出,同样β
中心
,β
边缘1
和β
边缘3
三个角度进行比对,采取3取2方式输出。
16.优选的,将利用十字光缝的中心点计算的两轴太阳角度分别与利用边缘点计算的同轴太阳角度进行比对,如果三个角度的偏差小于0.03
°
则三个角度的平均值作为最终输出,如果三个角度的偏差有一个超过0.03
°
则剩余两个平均作为最终输出,如果三个角度的相互偏差都超过0.03
°
则将中心角度直接作为输出。
17.优选的,基准镜的x法线与图像传感器u方向偏差小于1角分,基准镜y法线与图像传感器v方向偏差小于1角分。
18.本发明与现有技术相比的有益效果是:
19.采用了“十”字光缝,产品具备较强的抗污染能力,光缝局部被灰尘遮挡时,仍然可以通过缝上其他区域透过的光进行角度计算,仍能保证产品功能不会丢失。
20.采用了soc处理器,同一芯片内部同时具有可编程逻辑资源和arm处理器资源,片内具有丰富的flash和ram资源,不需要外围配置,大大简化了电路设计,实现了极小化的电路板设计。
21.接口简单,产品对外接口包括 5v供电电源和rs422接口。
22.典型指标如下:体积35mm
×
35mm
×
15mm,重量25g,功耗0.5w,视场120
°×
120
°
,精度优于0.05
°
(3σ),数据更新率大于10hz,具有精度高、体积小、重量轻、一体化、接口方便等优点
附图说明
23.图1纳型aps太阳敏感器整机组成;
24.图2光线引入器示意图;
25.图3十”字光缝成像示意图;
26.图4电路原理框图;
27.图5纳型aps太阳敏感器整机结构设计三视图;
28.图6基准镜坐标系和图像传感器坐标系对应关系图。
具体实施方式
29.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明具体实施例作进一步的详细描述。可以理解的是,此处所描述的具体实施例仅用于解释本发明,而非对本发明的限定。
30.另外还需要说明的是,为了便于描述,附图中仅展示出了与本发明相关部分而非全部内容。在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各项操作(或步骤)描述成顺序处理,但是其中许多操作可以被并行地、并发地或者同时实施。此外,各项操作的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所
述处理可以对应于方法、函数、规程、子例程、子程序等等。
31.微纳卫星对太阳敏感器重量、体积以及功耗等均有小型化需求,需要接口简单,基于此背景,利用soc(system on a chip)和mems等技术开展了纳型aps太阳敏感器的研制,实现了一款接口简单、性能优异、可即插即用的纳型aps太阳敏感器。
32.纳型aps太阳敏感器的工作原理是将太阳看为无穷远近似点光源,太阳光线到达敏感器表面的光线近似为平行光,利用光线引入器将太阳光线投影到图像传感器上形成亮斑,通过计算亮斑的质心,然后与光线零度角入射时的质心位置比较便可以得到敏感器的基准平面相对于太阳的姿态角度,其中光线零度角入射时的成像位置是通过对敏感器的标定获得。
33.如图1所示,本发明的纳型aps太阳敏感器由光线引入器、soc处理板、主体结构和基准镜组成。光线引入器实现太阳光强的衰减和太阳光线的引入,soc处理板实现图像采集和图像处理,通过rs422接口输出太阳方位信息,基准镜表征纳型aps太阳敏感器本体坐标系,主体结构负责安装光线引入器、soc处理板和基准镜等。
34.本发明基于mems技术实现了光线引入器的镀膜和光刻,如图2所示,采用了“十”字光缝,利用中心点实现两个轴的太阳角度计算,利用四个边缘点辅助单轴太阳角度计算,在光缝出现污染时即便中心点完全不可见,仍可通过四个边缘点分别输出两轴太阳角。计算原理如下:
35.如图3所示,(x
中心
,y
中心
)为中心点可提取坐标,x
边缘1
和x
边缘3
为边缘1和边缘3提取的x轴坐标,y
边缘2
和y
边缘4
为边缘2和边缘4提取的y轴坐标,x
0中心
为中心点零位时x轴坐标、y
0中心
为中心点零位时y轴坐标,h
中心
为中心点探测器感光面到光线引入器下表面的距离;x
0边缘1
为边缘1点零位时x轴坐标,x
0边缘3
为边缘3点零位时x轴坐标,h
边缘1
为边缘1点探测器感光面到光线引入器下表面的距离,h
边缘3
为边缘3点探测器感光面到光线引入器下表面的距离;y
0边缘2
为边缘2点零位时y轴坐标,y
0边缘4
为边缘4点零位时y轴坐标,h
边缘2
为边缘2点探测器感光面到光线引入器下表面的距离,h
边缘4
为边缘4点探测器感光面到光线引入器下表面的距离,太阳敏感器输出角度计算如下:
[0036][0037][0038][0039][0040][0041][0042]
正常情况下,(α
中心
,β
中心
)为太阳敏感器输出,为提升可靠性,α
中心
,α
边缘1
和α
边缘3
三个角度会进行比对,采取3取2方式用作输出,同样β
中心
,β
边缘1
和β
边缘3
三个角度也会进行比对,采取3
取2方式用作输出。
[0043]
本发明利用高度集成的soc技术简化处理线路,利用soc中的逻辑资源实现图像传感器的控制、图像采集、图像预处理,利用soc中的arm cortex-m3内核资源实现两轴太阳角度的计算,无需外部ram器件、rom或flash器件,将整个soc处理板缩小至30mm
×
30mm的大小。
[0044]
本发明纳型aps太阳敏感器的具体实现步骤如下:
[0045]
第一步:光线引入器设计和加工,光线引入器基板玻璃大小为φ10mm,厚度为0.5mm,光线引入器基板玻璃上表面设计三层膜,从玻璃基板由内到外分别是减反膜、中性衰减膜和强反膜,减反膜主要控制膜层内部以及图像传感器表面反射的杂光,中性衰减膜实现太阳光强的中性衰减,衰减系数为1/15000,强反膜主要完成太阳光线的反射,减小光强入射,降低光线引入器表面温度,光线引入器基板玻璃下表面设计窄带衰减膜和减反膜,窄带衰减膜通过波段为800nm
±
5nm,“十”字光缝刻在减反膜上,光缝宽度为11um。
[0046]
第二步:soc处理板设计和加工,如图4所示,soc处理板方案框图,板上包括图像传感器、soc器件、rs422接口器件和四种内部电源转换dc-dc,图像传感器选择选择onsemi公司的mt9p031,soc器件选择microsemi公司m2s025,rs422接口器件选择ti公司的sn65hvd379,dc-dc选择ti公司的tps82130,利用rc电路和74lvc2g14非门向soc器件实现上电复位
[0047]
第三步:主体结构设计,如图5所示,对纳型aps太阳敏感器主体结构设计,本体尺寸为35mm
×
35mm
×
15mm,整个主体结构除了后盖采用一体化结构设计。
[0048]
第四步:整机装配,将基准镜和光线引入器粘接到主体结构,将soc处理板安装到主体结构,调整电路板的位置,如图6所示,控制基准镜的x法线与图像传感器u方向偏差小于1角分,控制基准镜y法线与图像传感器v方向偏差小于1角分。此处的图像传感器的u、v方向为行列方向,基准镜的x、y法线为基准镜两个面的法线方向。
[0049]
第五步:整机标定,将装配完成的纳型aps太阳敏感器安装于转台和太阳模拟器下,soc处理板利用转台和太阳模拟器的标定场确定纳型aps太阳敏感器x
0中心
、y
0中心
、h
中心
、x
0边缘1
、x
0边缘3
、h
边缘1
、h
边缘3
、y
0边缘2
、y
0边缘4
、h
边缘2
和h
边缘4
,利用前面公式求得α
中心
、α
边缘1
、α
边缘3
、β
中心
、β
边缘1
和β
边缘3
,α
中心
,α
边缘1
和α
边缘3
三个角度会进行比对,如果三个角度的偏差小于0.03
°
则三个角度的平均值作为产品最终输出,如果三个角度的偏差有一个超过0.03
°
则剩余两个平均作为最终输出,如果三个角度的相互偏差都超过0.03
°
则将中心角度直接作为输出。针对β
中心
、β
边缘1
和β
边缘3
三个角度采用相同的三取二方式作为最终输出。
[0050]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0051]
本发明未详细说明部分属于本领域技术人员的公知常识。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。