1.本发明涉及一种保障车间安全距离的多车协同制动控制方法、系统和可读介质,属于车辆自动驾驶技术领域。
背景技术:
2.多车协同控制是提升交通效率、保障行车安全的有效途径,是汽车工业智能化的一个重要发展方向。多车协同控制的主要思路是通过设计车载分布式控制器实现跟随车对头车的速度跟踪,同时保持车间有效的安全距离,避免多车系统内部碰撞。目前,多车协同控制呈现出较大的市场潜力,特别是在商用车运输领域,能够大幅降低人力运输成本,提高交通效率,保障行车安全。
3.制动过程控制对多车系统至关重要,严重影响多车系统行车安全。而多车制动系统存在多源制动介质耦合、异质制动响应差异、数学模型抽象困难及复杂干扰影响大的问题,增加了多车协同制动控制技术开发难度。因此,如何设计能够严格保证行车安全的多车协同制动控制方法及系统,是亟待解决的难题。
4.现有多车协同制动控制技术主要基于队列稳定性和多智能体一致性的技术路线展开。队列稳定性主要指多车控制系统受扰后导致的车间跟驰误差沿多车系统由前至后传递期间持续衰减;其对多车系统初始位置误差要求苛刻,实际难以实现。基于一致性的技术路线目前以分布式线性控制技术为主,部分公开的考虑车间安全距离约束的多车协同控制采用预设性能控制技术,存在潜在的奇异问题,易诱发多车协同控制系统失稳,进而导致车辆碰撞事故。
技术实现要素:
5.针对上述问题,本发明的目的是提供一种保障车间安全距离的多车协同制动控制方法、系统和可读介质,其采用了道路场景识别模块,根据当前车辆所处的道路场景,在线调整安全距离策略,可以兼顾道路行车安全性及交通效率,适用于多种道路场景。
6.为实现上述目的,本发明提出了以下技术方案:一种保障车间安全距离的多车协同制动控制方法,包括以下步骤:分别获取自车、头车和临车的加速度、速度和位移;根据自车、头车和临车的加速度、速度和位移,裁决多车是否处于多车协同制动,若不处于多车协同制动,返回上一步,若处于多车协同制动,则执行下一步;计算自车参考制动力矩,自车根据自车参考制动力矩进行制动,通过多车协同制动,对所有车辆实时制动操作。
7.进一步,裁决多车是否处于多车协同制动的公式为:
[0008][0009]
其中,f
lag
是多车协同制动标志位,f
lag
=1表示多车系统当前处于协同制动,f
lag
=0表示多车系统当前不处于协同制动,p
dl0bra
是头车制动踏板开度,p
dllim
是制动踏板开度门限值,p
dldlim
是制动踏板开度的一阶导数门限值;t
0bra
是头车持续制动时间,t
limit
是协同制
动时间临界值。
[0010]
进一步,计算自车参考制动力矩的方法为:制定多车通信拓扑结构;基于多车通信拓扑结构,在线识别当前车辆所处的道路场景,并根据道路场景,获取车间安全距离策略;根据车间安全距离策略,建立多车系统模型及控制目标,计算多车协同制动过程复合位移误差;根据道路场景,制定复合位移误差硬性funnel约束,并将复合位移误差转换为无约束形式;在线观测多车系统协同制动过程的未知扰动项,并根据未知扰动项计算自车的参考制动力矩;判断再生制动是否工作,若再生制动不工作,则再生制动力矩置零,若再生制动工作,则根据自车的参考制动力矩,进行前轴制动力矩、后轴制动力矩、再生制动力矩和摩擦制动力矩分配。
[0011]
进一步,车间安全距离策略采用可变车头时距的安全距离策略,其计算公式为:
[0012][0013]
其中,δp0和δpi分别是第i辆车的最小安全距离和安全距离;h
0i
是绝对车头时距参数,h
1i
是相对车头时距参数;hi(t vi(t) v
i-1
(t))是车头时距;δp0、h
0i
和h
1i
都是与道路场景相关的参数,vi(t)是跟随车i的行进速度。
[0014]
进一步,多车系统模型的公式为:
[0015][0016]
其中,pi和vi分别是跟随车i的行进位移和速度;t
mi
是跟随车i的总制动力矩;mi、g
ti
和ri分别是跟随车i的质量、总减速比和车轮有效半径;是跟随车i的位置扰动项;对于跟随车i,协同制动过程的控制目标的公式为:
[0017][0018]
其中,p0和v0分别是头车的行进位移和速度,δpi是第i辆车的安全距离,vi(t)是跟随车i的行进速度。
[0019]
进一步,多车协同制动过程复合位移误差的计算公式为:
[0020][0021]
其中,σ
pi
和σ
vi
分别是跟随车i的复合位移误差及其一阶导数项;δp
i0
和δp
ij
分别是跟随车i至头车、跟随车j的安全距离,∏
ij
是跟随车i和跟随车j之间信息交互标志位,qi是跟随车i和头车之间信息交互标志位。
[0022]
进一步,复合位移误差转换为无约束形式的计算公式为:
[0023]
[0024]
其中,li是转换后的funnel误差变量,φ
pi
(t)是funnel性能函数。
[0025]
进一步,自车的参考制动力矩的计算公式为:
[0026][0027]
其中,t
mi
是自车的参考制动力矩,mi、g
ti
和ri分别是跟随车i的质量、总减速比和车轮有效半径,β
dxc1
、β
dxc2
、β
dxc3
、k
dxci1
、k
dxci2
和k
dxci3
都是正常数;s
dxsi
是滑模变量;是跟随车i的位置扰动项,∏
ij
是跟随车i和跟随车j之间信息交互标志位,qj是跟随车j和头车之间信息交互标志位,间信息交互标志位,σ
pi
和σ
vi
分别是跟随车i的复合位移误差及其一阶导数项,v0是头车的速度,φ
pi
是funnel性能函数,和ψ(
·
)均为非线性函数;sign(
·
)是符号函数;β
dxs
是常数,li是转换后的funnel误差变量。
[0028]
本发明还公开了一种保障车间安全距离的多车协同制动控制系统,包括:数据获取模块,用于分别获取自车、头车和临车的加速度、速度和位移;协同制动触发模块,用于根据自车、头车和临车的加速度、速度和位移,裁决多车是否处于多车协同制动,若不处于多车协同制动,返回上一步,若处于多车协同制动,则执行下一步;复合制动模块,用于计算自车参考制动力矩,自车根据自车参考制动力矩进行制动,通过多车协同制动,对所有车辆实时制动操作。
[0029]
本发明还公开了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行以实现上述任一项保障车间安全距离的多车协同制动控制方法。
[0030]
本发明由于采取以上技术方案,其具有以下优点:
[0031]
1、本发明采用了道路场景识别模块,根据当前车辆所处的道路场景,在线调整安全距离策略,可以兼顾道路行车安全性及交通效率,适用于多种道路场景;
[0032]
2、本发明采用了复合误差硬性funnel约束模块,将安全距离约束融入多车系统协同制动控制算法设计中,可实现严格保障车间安全距离的多车系统协同制动控制,大大提升多车系统协同制动过程的安全性。
[0033]
3、本发明采用了干扰观测模块,能够快速估计多车系统未知扰动项,并进行前馈补偿,具备极强的鲁棒性和复杂环境的适应性。
附图说明
[0034]
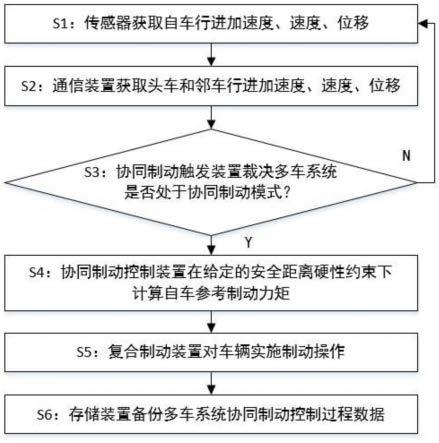
图1是本发明一实施例中保障车间安全距离的多车协同制动控制方法的流程图;
[0035]
图2是本发明一实施例中多车系统协同制动控制过程自车参考制动力矩的计算流程图;
[0036]
图3是本发明另一实施例中保障车间安全距离的多车协同制动控制系统的结构图。
具体实施方式
[0037]
为了使本领域技术人员更好的理解本发明的技术方案,通过具体实施例对本发明进行详细的描绘。然而应当理解,具体实施方式的提供仅为了更好地理解本发明,它们不应该理解成对本发明的限制。在本发明的描述中,需要理解的是,所用到的术语仅仅是用于描述的目的,而不能理解为指示或暗示相对重要性。
[0038]
为了解决现有技术中存在的对多车系统初始位置误差要求苛刻,部分采用预设性能控制技术考虑车间安全距离约束的多车协同控制存在潜在的奇异问题,易诱发多车协同控制系统失稳,进而导致车辆碰撞事故等问题,本发明提出了一种保障车间安全距离的多车协同制动控制方法、系统和可读介质,其通过传感器获取自车的行进加速度、速度和位移;通过通信装置获取头车及邻车的行进加速度、速度和位移;在此基础上,协同制动触发装置裁决多车系统是否处于协同制动;若处于协同制动,协同制动控制装置在给定的安全距离硬性约束下计算自车参考制动力矩;复合制动装置根据参考制动力矩,对车辆实施制动操作,实现多车系统协同制动控制;最后,存储装置备份多车协同制动过程数据。本发明可广泛应用于多车协同制动领域,其采用了道路场景识别模块,根据当前车辆所处的道路场景,在线调整安全距离策略,可以兼顾道路行车安全性及交通效率,适用于多种道路场景。下面结合附图,通过实施例对本发明方案进行详细阐述。
[0039]
实施例一
[0040]
本实施公开了一种保障车间安全距离的多车协同制动控制方法,如图1所示,包括以下步骤:
[0041]
s1分别获取自车、头车和临车的加速度、速度和位移。
[0042]
通过数据获取模块获取自车行进加速度、速度和位移;获取头车和邻车的行进加速度、速度和位移,数据获取模块包括传感器和车载通信装置,通过传感器获取自车行进加速度、速度和位移;车载通信装置获取头车和邻车的行进加速度、速度和位移。
[0043]
s2根据自车、头车和临车的加速度、速度和位移,裁决多车是否处于多车协同制动,若不处于多车协同制动,返回上一步,若处于多车协同制动,则执行下一步。
[0044]
裁决多车是否处于多车协同制动的公式为:
[0045][0046]
其中,f
lag
是多车协同制动标志位,f
lag
=1表示多车系统当前处于协同制动,f
lag
=0表示多车系统当前不处于协同制动,p
dl0b
是头车制动踏板开度,p
dllim
是制动踏板开度门限值,p
dldlim
是制动踏板开度的一阶导数门限值;t
0bra
是头车持续制动时间,t
limit
是协同制动时间临界值。
[0047]
s3在给定的安全距离硬性约束下计算自车参考制动力矩,自车根据自车参考制动力矩进行制动,通过多车协同制动,对所有车辆实时制动操作,多车协同制动过程产生的数据进行存储。
[0048]
如图2所示,在给定的安全距离硬性约束下计算自车参考制动力矩的方法,具体包括以下步骤:
[0049]
s3.1制定多车通信拓扑结构;基于多车通信拓扑结构,在线识别当前车辆所处的道路场景,并根据道路场景,获取车间安全距离策略。
[0050]
本实施例中采用基于规则或深度学习等技术手段在线识别当前车辆所处的道路场景,其中,典型场景包括但不限于城市拥堵驾驶场景、城市低速驾驶场景、郊区道路驾驶场景和高速公路驾驶场景。
[0051]
根据道路场景获取车间安全距离策略采用可变车头时距的安全距离策略,其计算公式为:
[0052][0053]
其中,δp0和δpi分别是第i辆车的最小安全距离和安全距离;h
0i
是绝对车头时距参数,h
1i
是相对车头时距参数,且h
0i
,h
1i
》0是正常数;hi(t vi(t) v
i-1
(t))是车头时距;δp0、h
0i
和h
1i
都是与道路场景相关的参数,vi(t)是跟随车i的行进速度,上述参数可以根据当前多车系统所处的道路场景进行动态设置。
[0054]
s3.2根据车间安全距离策略,建立多车系统模型及控制目标,计算多车协同制动过程复合位移误差。
[0055]
建立多车系统模型及控制目标,其中多车系统模型的公式为:
[0056][0057]
其中,pi和vi分别是跟随车i的行进位移和速度;t
mi
是跟随车i的总制动力矩;mi、g
ti
和ri分别是跟随车i的质量、总减速比和车轮有效半径;是跟随车i的位置扰动项;跟随车i的位置扰动项包括但不限于参数不确定性和时变外部扰动等。
[0058]
对于跟随车i,协同制动过程的控制目标的公式为:
[0059][0060]
其中,p0和v0分别是头车的行进位移和速度,δpi是第i辆车的安全距离,vi(t)是跟随车i的行进速度。
[0061]
多车协同制动过程复合位移误差的计算公式为:
[0062]
[0063]
其中,σ
pi
和σ
vi
分别是跟随车i的复合位移误差及其一阶导数项;δp
i0
和δp
ij
分别是跟随车i至头车、跟随车j的安全距离,∏
ij
是跟随车i和跟随车j之间信息交互标志位,qi是跟随车i和头车之间信息交互标志位。
[0064]
本实施例中,
[0065]
∏
ij
是跟随车i和跟随车j之间信息交互标志位具体公式如下:
[0066][0067]
qi是跟随车i和头车之间信息交互标志位,具体公式如下:
[0068][0069]
构建跟随车i的复合位移误差及一阶项导数项的方程,具体公式如下:
[0070][0071]
s3.3根据道路场景,制定复合位移误差硬性funnel约束,并将复合位移误差转换为无约束形式。
[0072]
在本实施例中,根据道路场景,制定复合位移误差硬性funnel性能约束,具体公式如下:
[0073]-φ
pi
(t)≤σ
pi
≤ φ
pi
(t)
[0074]
其中, φ
pi
(t)和-φ
pi
(t)分别为跟随车i复合位移误差的上下边界,具体公式如下:
[0075][0076]
其中,φ
pi0
、φ
pi∞
和分别是funnel性能函数φ
pi
(t)的初值、终值和收敛速率;φ
pi0
、φ
pi∞
和均是与道路场景相关的参数,可以根据当前多车系统所处的道路场景进行动态设置。
[0077]
复合位移误差转换为无约束形式的计算公式为:
[0078][0079]
其中,li是转换后的funnel误差变量,φ
pi
(t)是funnel性能函数。转换后的funnel误差变量一阶及二阶导数项表示如下:
[0080][0081]
其中,
[0082]
s3.4在线观测多车系统协同制动过程的未知扰动项,并根据未知扰动项计算自车的参考制动力矩。
[0083]
本实施例中,采用固定时间扰动观测器观测多车系统协同制动过程的未知扰动项,具体公式如下:
[0084][0085]
其中,和分别是系统状态σ
pi
、σ
vi
和的估计值,是状态σ
pi
的估计误差,κ
dxoj
》0,j=1,2,3,4,5,6是正常数;α
dxoj
》0,j=1,2,3,且α
dxoj
=j(α
dxo-1) 1,α
dxo
∈(0 1)是正常数;β
dxoj
》1,j=1,2,3,且β
dxoj
=j(β
dxo-1) 1,β
dxo
∈(0 1)是正常数;是正常数;是正常数;sign(
·
)是符号函数。
[0086]
自车的参考制动力矩的计算公式为:
[0087][0088]
其中,t
mi
是自车的参考制动力矩,mi、g
ti
和ri分别是跟随车i的质量、总减速比和车轮有效半径,β
dxc1
、β
dxc2
、β
dxc3
、k
dxci1
、k
dxci2
和k
dxci3
都是正常数,β
dxc1
》1,β
dxc1
β
dxc2
《1、β
dxc1
β
dxc3
》1、k
dxci1
》1、k
dxci2
》0且k
dxci3
》0;s
dxsi
是滑模变量;是跟随车i的位置扰动项,∏
ij
是跟随车i和跟随车j之间信息交互标志位,qj是跟随车j和头车
之间信息交互标志位,之间信息交互标志位,σ
pi
和σ
vi
分别是跟随车i的复合位移误差及其一阶导数项,v0是头车的速度,φ
pi
是funnel性能函数,和ψ(
·
)均为非线性函数;sign(
·
)是符号函数;β
dxs
是常数,li是转换后的funnel误差变量。
[0089]sdxsi
是滑模变量,其具体公式为:
[0090][0091]
其中,
[0092]092]kdxsa
,k
dxsb
》0,ρ
dxs
,β
dxs
》1,p
dxs
和q
dxs
是正常数,满足q
dxs
ρ
dxs
》1和
[0093]
和ψ(
·
)是非线性函数,其具体公式如下:
[0094][0095][0096]
s3.5判断再生制动是否工作,若再生制动不工作,则再生制动力矩置零,若再生制动工作,则根据自车的参考制动力矩,进行前轴制动力矩、后轴制动力矩、再生制动力矩和摩擦制动力矩分配。
[0097]
其中,前轴制动力矩、后轴制动力矩分配采用i曲线分配;再生制动力矩和摩擦制动力矩分配遵循再生制动优先,摩擦制动补偿的原则,具体公式如下:
[0098][0099]
其中,t
lim
是电机力矩边界,t
mbi
是再生制动力矩,t
hbi
是摩擦制动力矩。
[0100]
实施例二
[0101]
基于相同的发明构思,本实施例公开了一种保障车间安全距离的多车协同制动控制系统,如图3所示,包括:数据获取模块、协同制动触发模块和复合制动模块;
[0102]
数据获取模块,用于分别获取自车、头车和临车的加速度、速度和位移;该数据获取模块包括传感装置1和车载通信装置2,通过传感器1获取自车行进加速度、速度和位移;车载通信装置2获取头车和邻车的行进加速度、速度和位移。
[0103]
协同制动触发模块,包括协同制动触发装置3,用于根据自车、头车和临车的加速度、速度和位移,裁决多车是否处于多车协同制动,若不处于多车协同制动,返回上一步,若处于多车协同制动,则执行下一步;
[0104]
复合制动模块,用于计算自车参考制动力矩,自车根据自车参考制动力矩进行制动,通过多车协同制动,对所有车辆实时制动操作。复合制动模块包括协同制动控制装置4、复合制动装置5和存储装置6,其中,协同制动控制装置4用于根据自车、头车和邻车的运行状态,计算自车参考制动力矩;复合制动装置5用于自车根据自车参考制动力矩进行制动,通过多车协同制动,对所有车辆实时制动操作;存储装置6用于存储多车系统协同制动过程数据。
[0105]
本实施例中,该协同制动控制装置4具体包括通信拓扑设计模块41、道路场景识别模块42、安全距离设计模块43、复合误差计算模块44、复合误差硬性约束模块45、复合误差转换模块46、干扰观测模块47、参考制动力矩计算模块48、再生制动力矩使能模块49和制动力矩分配模块410;所述通信拓扑设计模块41用于制定多车系统的通信拓扑;所述道路场景识别模块42根据车辆运行状态,判断车辆所处的道路场景;根据当前道路场景,所述安全距离设计模43块制定对应场景下的安全距离策略;所述复合位移误差计算模块44用于计算多车系统协同制动过程复合位移误差;所述复合误差硬性约束模块45设计当前道路场景下的复合位移误差约束;所述复合误差转换模块46将带约束的复合误差转换为无约束的误差形式;所述干扰观测模块47用于估计系统未知扰动项;所述参考制动力矩计算模块48用于计算自车的总参考制动力矩;所述再生制动力矩使能模块49用于判断当前再生制动电机是否工作;所述制动力矩分配模块410用于前轴制动力矩、后轴制动力矩、再生制动力矩和摩擦制动力矩分配。
[0106]
实施例三
[0107]
基于相同的发明构思,本实施例公开了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行以实现上述任一项保障车间安全距离的多车协同制动控制方法。
[0108]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0109]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0110]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0111]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0112]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。上述内容仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
