1.本技术涉及康复医疗器械领域,尤其涉及一种上肢智能康复训练装置和康复训练系统。
背景技术:
2.目前,随着我国老龄化程度的提高,脑卒中患者的数量急剧增加,不仅给社会、家庭和个人生活带来困难,而且脑卒中患者不能够随意控制人体上肢活动,上肢活动在日常生活中发挥着十分重要的作用,针对上肢的康复训练和功能恢复对提高患者生活质量具有重大的意义。
3.上肢康复训练系统的作用机理是:患者手臂和康复系统的机械臂相连,机械臂的运动带动患者手臂完成各种训练动作,进而促进大脑运动神经可塑性发展,促进患者上肢神经组织的重组;保持关节的活动度,防止肌肉萎缩,提高患者运动功能的恢复程度。
4.然而,现有的上肢康复设备,普遍存在设备体积大,结构复杂,设备调整不方便,而且关节运动自由度少,缺乏人机交互,无法提高患者康复训练的积极性,也无法针对患者的康复训练输出训练数据和无法评估患者的训练效果,进一步的,无法实现肩关节的内外旋动作和相应的复合动作等问题,这些问题直接导致其设备的适用范围受到极大的限制。
技术实现要素:
5.本技术提供了一种上肢智能康复训练装置和康复训练系统,以解决设备体积大、适应性差,以及关节运动自由度少,无法实现肩关节的内外旋动作和相应的复合动作,缺乏人机交互等问题。
6.本技术提供了一种上肢智能康复训练装置,包括视景显示组件、控制组件和运动组件,所述视景显示组件与所述控制组件连接,所述控制组件与所述运动组件连接,且所述控制组件控制人的肢体随时所述运动组件做训练运动,所述视景显示组件用于采集人体做训练运动动作并显示;
7.所述运动组件包括坐具单元和机械臂单元,所述控制组件设置于所述坐具单元的背侧上,所述机械臂单元设置于所述控制组件的一侧上,且所述机械臂单元靠近人体手臂肩膀处;
8.所述机械臂单元包括用于实现手臂三个自由度运动的肩关节模块,以及肘关节模块和小臂模块,所述肩关节模块设置于所述控制组件的一侧上,所述肩关节模块、所述肘关节模块和所述小臂模块依次连接。
9.可选的,所述肩关节模块包括:第一驱动件、第一连接件、第二驱动件、第二连接件、第三驱动件和第三连接件;
10.所述第一驱动件设置于所述控制组件的一侧上,所述第一驱动件与所述第一连接件的一端活动连接并用以驱动所述第一连接件朝向第一自由度运动,所述第二驱动件分别与所述第一连接件的另一端活动连接和所述第二连接件的一端活动连接并用以驱动所述
第二连接件朝向第二自由度运动,所述第三驱动件分别与所述第二连接件的另一端活动连接和所述第三连接件的一端活动连接并用以驱动所述第三连接件朝向第三自由度运动,所述第三连接件的另一端与所述肘关节模块连接。
11.可选的,所述第一自由度运动的方向为所述肩关节模块内收或外展,所述第二自由度运动的方向为所述肩关节模块内旋或外旋,所述第三自由度运动的方向为所述肩关节模块伸展或屈曲。
12.可选的,所述控制组件包括用于控制所述机械臂单元运动的控制单元和固定件,所述固定件设置于所述控制单元的一侧上,所述机械臂单元设置于所述固定件上,所述控制单元设置于所述所述坐具单元的背侧上。
13.可选的,所述控制单元包括控制模块和编码模块,所述控制模块和所述编码模块连接,所述控制模块与所述机械臂单元无线连接,所述编码模块用于编写康复训练运动代码,所述控制模块用于通过所述编码模块的康复训练运动代码控制所述机械臂单元运动。
14.可选的,所述控制模块包括扩展板和控制板,所述控制板设置于所述扩展板上,且所述扩展板用于存储康复训练运动代码,所述控制板用于通过储康复训练运动代码控制所述机械臂单元运动;
15.所述编码模块包括能够编写多套康复训练运动代码的多个编码器。
16.可选的,所述控制单元还包括采样模块和压力传感模块,所述采样模块和所述压力传感模块连接,所述压力传感模块用于收集所述机械臂单元训练参数,所述采样模块用于将所述压力传感模块的训练参数传输至所述控制模块上。
17.可选的,还包括用于将训练动作控制信号发送、调控训练状态和记录训练的操控件,所述操控件与所述控制组件无线连接。
18.可选的,所述视景显示组件包括视景主机、体感摄像头和体感交互屏,所述体感摄像头用于采集患者训练时的实时动作,所述视景主机具用于将体感交互软件通过所述体感摄像头采集患者训练时的实时动作,所述体感交互屏与所述视景主机进行通信连接、用以体感交互屏显示交互游戏画面。
19.本技术还提供了一种康复训练系统,包括上述任意一项所述的上肢智能康复训练装置。
20.本技术通过视景显示组件、控制组件和运动组件,视景显示组件与控制组件连接,控制组件与运动组件连接,且控制组件控制人的肢体随时运动组件做训练运动,视景显示组件用于采集人体做训练运动动作并显示,从而提升了人机交互,增加了趣味性,同时,减小了设备体积、提高了适应性;运动组件包括坐具单元和机械臂单元,控制组件设置于坐具单元的背侧上,机械臂单元设置于控制组件的一侧上,且机械臂单元靠近人体手臂肩膀处;机械臂单元包括用于实现手臂三个自由度运动的肩关节模块,以及肘关节模块和小臂模块,肩关节模块设置于控制组件的一侧上,肩关节模块、肘关节模块和小臂模块依次连接,使得关节运动自由度增加,从而实现了肩关节的内外旋动作和相应的复合动作。
附图说明
21.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
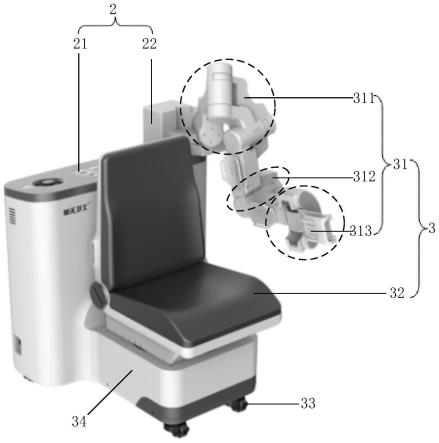
23.图1为本技术实施例提供的一种上肢智能康复训练装置部分示意图;
24.图2为本技术实施例提供的一种上肢智能康复训练装置的肩关节模块示意图;
25.图3为本技术实施例提供的一种上肢智能康复训练装置的控制组件具体示意图;
26.图4为本技术实施例提供的一种上肢智能康复训练装置全部示意图。
具体实施方式
27.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.如图1所示,本技术实施例提供了一种上肢智能康复训练装置,包括视景显示组件1、控制组件2和运动组件3,所述视景显示组件1与所述控制组件2连接,所述控制组件2与所述运动组件3连接,且所述控制组件2控制人的肢体随时所述运动组件3做训练运动,所述视景显示组件1用于采集人体做训练运动动作并显示,从而提升了人机交互,增加了趣味性,同时,减小了设备体积、提高了适应性,所述运动组件3包括坐具单元和机械臂单元31,所述控制组件2设置于所述坐具单元的背侧上,所述机械臂单元31设置于所述控制组件2的一侧上,且所述机械臂单元31靠近人体手臂肩膀处;所述机械臂单元31包括用于实现手臂三个自由度运动的肩关节模块311,以及肘关节模块312和小臂模块313,所述肩关节模块311设置于所述控制组件2的一侧上,所述肩关节模块311、所述肘关节模块312和所述小臂模块313依次连接。使得关节运动自由度增加,从而实现了肩关节的内外旋动作和相应的复合动作。
29.可选的,坐具32可以为座椅,在坐具32下设有多个万向轮,万向轮可自锁,从而方便移动装置随时移动,当需要停止运动,控制万向轮自锁,使得坐具32停止运动。进一步的,在坐具32下设有坐具调整机构34,用于实现坐具32左右前后移动,也即调整机构具有左右方向的滑轨和前后滑轨,坐具32底部设有滑块,滑块设置于左右方向的滑轨和前后方向的滑轨。
30.如图2所示,在一种实施例中,所述肩关节模块311包括:第一驱动件3111、第一连接件3112、第二驱动件3113、第二连接件3114、第三驱动件3115和第三连接件3116,所述第一驱动件3111设置于所述控制组件2的一侧上,所述第一驱动件3111与所述第一连接件3112的一端活动连接并用以驱动所述第一连接件3112朝向第一自由度运动,所述第二驱动件3113分别与所述第一连接件3112的另一端活动连接和所述第二连接件3114的一端活动连接并用以驱动所述第二连接件3114朝向第二自由度运动,所述第三驱动件3115分别与所述第二连接件3114的另一端活动连接和所述第三连接件3116的一端活动连接并用以驱动所述第三连接件3116朝向第三自由度运动,所述第三连接件3116的另一端与所述肘关节模块312连接。通过第一驱动件3111、第一连接件3112、第二驱动件3113、第二连接件3114、第三驱动件3115和第三连接件3116从而实现了3个自由度的运动,在加上肘关节模块312和小
臂模块313从而实现5个自由度的运动,所述肩关节模块311、所述肘关节模块312和所述小臂模块313依次连接,减小机械臂占用空间,提高关节的运动幅度。
31.可选的,所述第一自由度运动的方向为所述肩关节模块311内收或外展,所述第二自由度运动的方向为所述肩关节模块311内旋或外旋,所述第三自由度运动的方向为所述肩关节模块311伸展或屈曲。进一步的,第一驱动件3111、第二驱动件3113和第三驱动件3115之间轴线交于关节活动中心点,实现三个驱动件在空间的球面运动,提高关节运动范围。第一驱动件3111、第二驱动件3113和第三驱动件3115可以为电机。另外,肘关节模块312布置一个电机实现肘关节1个自由度:伸展/屈曲;所述小臂模块313采用齿轮结构实现手腕1个自由度:内旋/外旋,肘关节模块312和肩关节模块311与第三驱动件3115的连接、小臂模块313和肘关节模块312的连接均采用可调式结构连接,可根据不同患者的臂长要求进行调整,提高设备的适应性。
32.如图1所示,在一种实施例中,所述控制组件2包括用于控制所述机械臂单元31运动的控制单元和固定件,所述固定件设置于所述控制单元的一侧上,所述机械臂单元31设置于所述固定件上,所述控制单元设置于所述所述坐具单元的背侧上。可选的,控制单元与机械臂单元31无线连接,可以通过提前输入康复运动程序至控制单元中,控制单元能够通过康复运动程序使机械臂单元31以固定的动作运动,操作方便和安全,其中,固定件可以为立柱,方便固定机械臂单元31。可选的,运动组件3包括坐具32位置调节按钮,坐具32滑动设置于固定件上,位置调节按钮为多个按钮,通过按压不同的按钮,从而调节坐具32在固定件上的位置高度,方便患者调节。
33.如图3所示,在一种实施例中,所述控制单元包括控制模块和编码模块,所述控制模块和所述编码模块连接,所述控制模块与所述机械臂单元31无线连接,所述编码模块用于编写康复训练运动代码,所述控制模块用于通过所述编码模块的康复训练运动代码控制所述机械臂单元31运动。通过编码模块可以输入不同的康复运动训练代码,通过控制模块运行康复运动训练代码控制机械臂单元31做不同的康复训练运动,提升了康复运动的效果,且方便随时通过编码模块编写或输入代码程序,操作方便灵活。
34.在一种实施例中,所述控制模块包括扩展板和控制板,所述控制板设置于所述扩展板上,且所述扩展板用于存储康复训练运动代码,所述控制板用于通过储康复训练运动代码控制所述机械臂单元31运动,所述编码模块包括能够编写多套康复训练运动代码的多个编码器。通过多个编码器进行编写多套康复训练代码,从而提升了输入编码的速率,控制板能够控制多个编码器中的多套康复训练代码运行至机械臂单元31,实现机械臂单元31的运动。
35.在一种实施例中,所述控制单元还包括采样模块和压力传感模块,所述采样模块和所述压力传感模块连接,所述压力传感模块用于收集所述机械臂单元31训练参数,所述采样模块用于将所述压力传感模块的训练参数传输至所述控制模块上。通过压力传感模块收集机械臂单元31的训练参数,并将训练参数发送至采样模块,采样模块将训练参数传输至所述控制模块上,控制模块通过分析训练参数,根据训练参数从而得到训练效果,并且能够根据训练参数,调整训练量或修改训练方式,方便了随时调整训练。可选的,机械臂单元31具有路传感器,将采集到的训练参数,进行采集、检测、隔离、变送处理并放大到0~5v输出给采样模块,采样模块可以为ad采集板;采样模块完成5路模拟信号的实时采集,并将采
集的5路电压值实时转换成扭矩值。与此同时,控制板通过内置fpga的io口分别与5路驱动器连接,实时读取5路电机编码器的数值并可发出编码器置零信号,同时fpga的pwm输出口分别与5路驱动器连接,并可实时发送占空比可调的pwm控制信号,实时控制电机运动。
36.如图4所示,在一种实施例中,还包括用于将训练动作控制信号发送、调控训练状态和记录训练的操控件4,所述操控件4与所述控制组件2无线连接。可选的,操控件4可以为移动设备,包括平板、电脑、手机等,通过操控件4将训练动作控制信号发送给控制组件2,从而通过操控软件实现对机械臂单元31动作的无线控制,操控件4操控软件,实现康复机器人各个功能模式的参数设置、开始、结束以及训练状态的显示、记录等功能,并接收控制组件2发送的5路扭矩和5路关节角度信号。同时操控软件发送启停、动作模式给视景显示组件1,并接收训练游戏结果。操控视景显示组件1与控制组件2之间的通信通过蓝牙转串口实现。
37.可选的,所述视景显示组件1包括视景主机13、体感摄像头11和体感交互屏12,所述体感摄像头11用于采集患者训练时的实时动作,所述视景主机13具用于将体感交互软件通过所述体感摄像头11采集患者训练时的实时动作,所述体感交互屏12与所述视景主机13进行通信连接、用以体感交互屏12显示交互游戏画面。可选的,视景主机13安装体感交互软件,体感交互软件通过体感摄像头11采集患者训练时的实时动作,设计交互性与趣味性的交互游戏,同时通过蓝牙转串口协议与视景主机13进行通信,体感交互屏12显示交互游戏画面。坐具距离交互屏幕1.5~2m,屏幕前方2.5m处范围内设置警戒线,避免其他人员进入训练范围,摄像头置于交互屏上方。
38.可选的,本方案实现控制组件2和视景显示组件1的通讯需求,采用双通道蓝牙板。控制组件2具有蓝牙can转接板,将操控件4发送的蓝牙控制数据通过can转发给控制板,实现对康复机器人的控制;将操控件4发送的与视景显示组件1通讯的命令通过视景显示组件1蓝牙模块转发给视景显示组件1;将视景显示组件1发送的与操控件4通讯命令,通过操控件4蓝牙模块转发给控制组件2。
39.本技术还提供了一种康复训练系统,包括上述任意一项所述的上肢智能康复训练装置。
40.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
41.以上所述仅是本发明的具体实施方式,使本领域技术人员能够理解或实现本发明。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。