1.本发明涉及眼科手术系统,特别是涉及角膜地形成像指导的精准角膜交联散光矫正系统。
背景技术:
2.散光是常见的屈光不正,是指点光源发射光束进入眼内后,由于眼球在不同子午线上屈光力不等,不能聚焦于一点(焦点),而是在视网膜上形成弥散斑,因此无法产生清晰的物像。散光影响着患者的视力和生活质量,已成为日益严重的公共卫生问题。人眼散光主要由角膜散光和晶状体散光构成,其中,角膜散光起决定性作用。角膜的形状直接影响眼散光,在平坦子午线上,角膜弯曲弧度小,曲率半径大,屈光力小,成像位置靠后;在陡峭子午线上,角膜弯曲弧度大,曲率半径小,屈光力大,成像位置靠前。因此,目前永久性的散光矫正手术也多作用于角膜上。角膜地形图可以检测角膜上各点的曲率半径和屈光度,常被用于指导散光矫正。但目前临床治疗时所参照的角膜地形为治疗前所测得,而非患者及治疗仪器定位完成后所得,因此尚未实现散光治疗轴位精确校准。
3.现有散光矫正方法包括:佩戴框架眼镜、佩戴角膜接触镜、激光辅助原位角膜磨镶术等角膜激光手术、眼内屈光手术、散光角膜切开术。(1)框架眼镜及角膜接触镜的佩戴是目前大多数患者选择的治疗方式。它们能有效矫正散光,但框架眼镜在下雨天及温湿度变化大的场景、运动场景下均无法很好地进行作业,角膜接触镜佩戴不方便,且容易引起眼干、眼痛等眼表不适症状,不适用于干眼患者;(2)角膜激光手术通过激光削切或消融角膜基质层,切除或破坏基质层组织,使得目标区域内的角膜组织减少,从而使该区域角膜变平坦,改变角膜曲率,达到矫正散光的效果。但这类手术往往是破坏性的,在矫正散光的同时也造成了角膜组织的永久性损失,甚至可能导致角膜生物力学改变,易继发角膜扩张、干眼等术后并发症;(3)眼内屈光手术为侵入性眼内手术,通过散光矫正型人工晶状体的植入达到矫正散光的目的,但由于是眼内手术,存在着眼内炎等风险;(4)散光角膜切开术通过对陡峭子午线上的周边角膜进行非穿透性切开,使得角膜表面扩张松弛,使陡峭子午线变平坦,从而矫正散光。该术式方便且成本低廉,但可预测性不足,且角膜的切开也破坏了角膜的力学稳定性。因此,寻找非侵入性且稳定的散光矫正新技术有助于突破现有技术的局限性。
4.角膜胶原交联术是临床上用于治疗圆锥角膜的方法,近年来也被发现有治疗近视的潜能。角膜交联疗法的基本原理是光敏剂核黄素在紫外光的激发下,产生氧自由基,进而诱导催化角膜基质层中胶原纤维间的氧化交联,从而增加纤维的直径、硬度。而胶原纤维的交联不仅能增强角膜的硬度,还可能改变基质层间的牵引作用,从而带来角膜微观结构和表面形貌变化,因而有可能通过这种方式来改变目标角膜区域的表面形貌,通过改变角膜表面的弯曲弧度,进而改变角膜的屈光力。但目前现有的角膜交联技术通过传统的圆形光斑进行全角膜交联,因此无法定向定点改变陡峭子午线或平坦子午线的角膜曲率,尚不适合应用于散光矫正。且在治疗过程中无法实时观测交联效果及角膜地形变化,患者体位、眼
位的变化而也可能会导致定位不准而影响治疗效果,制定新的角膜交联治疗模式并引入实时监测模块,研发角膜地形成像指导的可视化精准角膜交联散光矫正系统将能实现非侵入性且稳定的散光矫正。
5.以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现要素:
6.本发明的主要目的在于克服上述背景技术的缺陷,提供一种角膜地形成像指导的可视化精准角膜交联散光矫正系统,以提高散光矫正手术中交联输出图案的准确度,达到更好的治疗效果。
7.为实现上述目的,本发明采用以下技术方案:
8.一种角膜地形成像指导的可视化精准角膜交联散光矫正系统,包括交联治疗模块、实时检测模块和控制模块,所述交联治疗模块用于输出用于实现角膜交联治疗的光斑,所述实时检测模块用于与交联治疗同步实时检测治疗时的眼部形态及角膜地形成像,并根据实时检测的角膜地形变化动态定位散光治疗轴,所述控制模块根据所述实时检测模块实时检测成像的角膜地形和动态定位的散光治疗轴生成角膜交联图案方案,并控制所述交联治疗模块按照所述角膜交联图案方案输出所述光斑,从而实现角膜地形成像指导的角膜交联散光矫正。
9.进一步地,所述交联治疗模块包括紫外光光源、所述实时检测模块包括白光光源,所述控制模块控制所述紫外光光源和所述白光光源呈脉冲式交替发出紫外光和白光,使交联治疗与实时检测交替进行,同步完成。
10.进一步地,在所述控制模块的控制下,所述实时检测模块的所述白光光源呈脉冲式输出placido环图像投影,所述placido环图像为明暗相间的同心环图像。
11.进一步地,所述实时检测模块包括成像单元和图像处理单元,所述成像单元采集所述白光光源所形成的所述placido环图像投影,所述图像处理单元实时分析所述placido环图像投影,选取所述placido环图像投影在360个半子午线的点,比对数据库的预设数据计算各点位置变化,进行球面拟合,以240*240点阵计算各点角膜与标准球面相比的相对高度、曲率半径及曲率,生成角膜地形,优选地,所述角膜地形包括角膜前表面高度图及角膜前表面切向曲率图。
12.进一步地,所述成像单元包括四个摄像头,所述四个摄像头分别位于眼球上方12点钟、3点钟、6点钟、9点钟方位,用于采集所述眼球形态及所述placido环图像投影。
13.进一步地,基于角膜前表面高度图进行交联图案设计,其中,选取以瞳孔为中心,直径4mm至9mm间的圆环,将在所述圆环范围内相对高度大于零即绝对高度高于标准眼的各点所形成的区域划定为交联图案。
14.进一步地,在进行交联治疗时,紫外光以开1秒、关1秒的脉冲式输出交联图案投影,交联能量为0-30mw/cm2,氧气浓度大于等于95%,其中所述交联能量根据交联区域内的角膜前表面相对高度范围及角膜散光度数确定;在进行实时检测时,白光以关1秒、开1秒的脉冲式输出placido环图像投影。
15.进一步地,所述交联治疗模块包括供氧单元,所述供氧单元包括供氧眼罩、输出管道、氧气产生装置、氧气浓度检测装置,用于在治疗过程中完成氧气的持续输出及浓度实时检测,以使治疗过程中氧气浓度大于等于95%。
16.进一步地,所述控制模块为控制存储模块,所述控制存储模块还将所述实时检测模块所记录的眼部形态及角膜地形成像变化以视频和/或图片形式储存。
17.进一步地,还包括显示单元,用于显示治疗前、治疗时及治疗后的眼部形态及角膜地形成像。
18.本发明具有如下有益效果:
19.本发明提供的可视化精准角膜交联散光矫正系统,在交联治疗模块输出用于实现角膜交联治疗的光斑时,实时检测模块同步实时检测眼部形态及角膜地形成像,并根据实时检测的角膜地形变化动态定位散光治疗轴,控制模块根据实时检测成像的角膜地形和动态定位的散光治疗轴生成角膜交联图案方案,并控制所述交联治疗模块按照所述角膜交联图案方案进行光斑输出,从而实现角膜地形成像指导的角膜交联散光矫正,由此,本发明克服了现有角膜交联系统无法满足散光矫正需求、无法实时精准定位散光治疗轴、无法根据实时治疗效果动态控制交联图案的问题,在交联治疗的同时实时检测角膜地形变化并精准定位散光治疗轴,来动态生成角膜交联图案方案,最终完成非侵入性、精准散光矫正。
20.本发明提供的散光矫正系统可以实现集角膜交联治疗与角膜地形检测于一体,完成二者的原位结合,在交联治疗过程中实时检测角膜地形变化、精准定位散光治疗轴,并据此动态实时输出治疗图案,从而减少检测和治疗过程患者体位变化、眼球旋转等引起的定位偏差,在角膜地形成像指导下进行交联散光矫正,极大提高交联输出图案的准确度,能达到更好的手术治疗效果,提供了精准、个性化交联治疗散光的可能。
21.进一步地,利用本发明的可视化的散光矫正系统,在治疗过程中医生可以实时观察角膜地形变化,进行治疗过程的监督,有助于保证手术过程的安全和有效性。
22.进一步地,本发明可还将手术过程中眼部外观及角膜形貌变化以图像及视频的形式进行记录,可追溯,可供后续回顾性观察术中患者角膜地形的变化。
附图说明
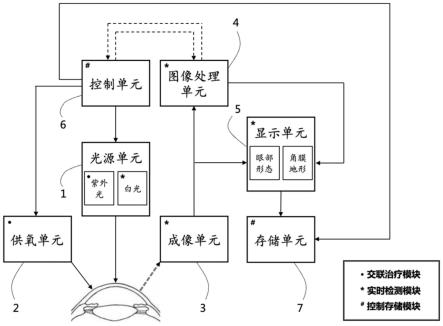
23.图1为本发明一种实施例的角膜地形成像指导的可视化精准角膜交联散光矫正系统的结构框图;
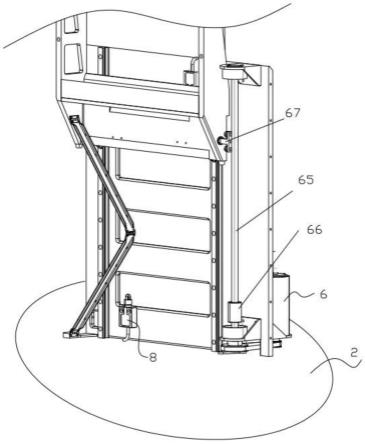
24.图2为本发明一种实施例的角膜地形成像指导的可视化精准角膜交联散光矫正系统的部件图;
25.图3为本发明一种实施例的角膜地形成像指导的可视化精准角膜交联散光矫正系统的步骤示意图;
26.图4为本发明一种实施例的角膜地形成像指导的可视化精准角膜交联散光矫正系统的动物实验结果图。
具体实施方式
27.以下对本发明的实施方式做详细说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用。
28.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接既可以是用于固定作用也可以是用于耦合或连通作用。
29.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
30.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
31.参阅图1至图3,本发明实施例提供一种角膜地形成像指导的可视化精准角膜交联散光矫正系统,包括交联治疗模块、实时检测模块和控制模块,所述交联治疗模块用于输出用于实现角膜交联治疗的光斑,所述实时检测模块用于与交联治疗同步实时检测治疗时的眼部形态及角膜地形成像,并根据实时检测的角膜地形变化动态定位散光治疗轴,所述控制模块根据所述实时检测模块实时检测成像的角膜地形和动态定位的散光治疗轴生成角膜交联图案方案,并控制所述交联治疗模块按照所述角膜交联图案方案输出所述光斑,从而实现角膜地形成像指导的角膜交联散光矫正。
32.在一个优选的实施例中,所述交联治疗模块包括紫外光光源、所述实时检测模块包括白光光源,所述控制模块控制所述紫外光光源和所述白光光源呈脉冲式交替发出紫外光和白光,使交联治疗与实时检测交替进行,同步完成。
33.工作过程中,由交联治疗模块输出用于实现角膜交联治疗的光斑,由实时检测模块同步实时检测治疗时的眼部形态及角膜地形成像,并根据实时检测的角膜地形变化动态定位散光治疗轴,控制模块根据实时检测成像的角膜地形和动态定位的散光治疗轴动态实时生成角膜交联图案方案,并控制所述交联治疗模块按照所述角膜交联图案方案输出所述光斑,从而完成角膜地形成像指导的角膜交联散光矫正。由此方案,在交联治疗时同步实时检测角膜地形变化并精准定位散光治疗轴,来动态生成角膜交联图案方案,实现精准的非侵入性散光矫正。
34.该系统在交联治疗过程中实时检测角膜地形变化并精准定位散光治疗轴,并据此动态实时输出治疗图案,从而能够减少检测和治疗过程患者体位变化、眼球旋转等引起的定位偏差,在角膜地形成像指导下进行交联散光矫正,极大提高交联输出图案的准确度,能达到更好的手术治疗效果,提供了精准、个性化交联治疗散光的可能。
35.该角膜地形成像指导的可视化精准角膜交联散光矫正系统集角膜交联治疗与角膜地形检测于一体,实现非侵入性、稳定、方便、个体化、可预测、可追溯且能增强角膜力学稳定性的精准散光矫正。
36.在一些实施例中,一种角膜地形成像指导的可视化精准角膜交联散光矫正系统,包括交联治疗模块、实时检测模块和控制存储模块,所述交联治疗模块用于投影脉冲式输出定制化角膜交联光斑,所述实时检测模块用于实时检测并显示治疗前、治疗时及治疗后
的眼部形态及角膜地形成像,所述角膜地形成像通过分析投影于角膜上的placido环图像实现,所述控制存储模块根据实时检测模块形成的角膜高度图自动生成定制化角膜交联图案方案,然后通过所述交联治疗模块输出光斑进行治疗,此外,所述控制存储模块还将所述实时检测模块所记录的眼部形态及角膜地形成像变化以手术录像及图片形式储存。
37.在一些实施例中,所述交联治疗模块包括光源单元1中的紫外光部分11、供氧单元2,所述实时检测模块包括光源单元1中的白光部分12、成像单元3、图像处理单元4和显示单元5,所述控制存储模块包括控制单元6和存储单元7。所述控制单元6控制光源单元1的光束输出、图像处理单元4的图像整合及角膜地形成像分析、存储单元7的信息储存、供氧单元2的氧气输出等。
38.在一些实施例中,所述光源单元1中包括具有微反射镜阵列的数字化光投影芯片,所述数字化光投影芯片可将准直光束细分为小光束,并在控制单元6的控制下按设定方式选择反射或不反射各个小光束,最终在角膜上形成预设的光束投影。所述准直光束为光机发出后经过准直透镜准直后的光束,包括用于交联治疗的紫外光部分11和用于实时检测的白光部分12,二者均可脉冲式/非脉冲式发光。
39.在一些实施例中,在进行交联治疗时,所述控制单元6控制光源单元1的紫外光呈脉冲式(开1秒,关1秒)输出定制化治疗图案投影,能量为0-30mw/cm2,氧气浓度大于等于95%。
40.在一些实施例中,在进行实时检测时,所述控制单元6控制光源单元1的白光呈脉冲式(关1秒,开1秒)输出placido环图像投影。
41.由此,所述控制单元6控制下的紫外光和白光呈脉冲式交替输出,即交联治疗与实时检测互不冲突,交替进行,同步完成,从而实现实时精准定位散光治疗轴及实时检测治疗效果。
42.在一些实施例中,在进行实时检测时,白光呈脉冲式(关1秒,开1秒)输出placido环图像投影,所述placido环图像为明暗相间的同心环,当角膜表面半径为7.94的标准球面时,在准确对焦位置上,光源单元1所输出的placido图像在角膜表面形成的投影为宽度相等、间隔相等的明(白光)暗相间同心环。若角膜表面偏离标准球面,则所形成的投影环位置发生变化,图像处理单元4可根据环上各点位置变化比对数据库分析计算获得角膜形貌。
43.在一些实施例中,所述成像单元3包括四个摄像头31、32、33、34,分别位于眼球上方12点钟、3点钟、6点钟、9点钟方位,采集眼球形貌及角膜表面投影图像。
44.在一些实施例中,所述图像处理单元4包括图像整合及角膜地形成像分析两个功能,将成像单元3所采集图像进行整合以减少成像误差,并分析所述光源单元1白光部分12所形成的角膜投影,选取placido投影在360个半子午线的点,比对数据库计算各点位置变化,通过内置程序进行球面拟合,以240*240点阵计算各点角膜相对高度(与标准球面相比)、曲率半径及曲率,生成角膜地形,包括但不限于角膜前表面高度图及角膜前表面切向曲率图。
45.在一些实施例中,将所述图像处理单元4整合处理后的眼部形态及分析所得角膜地形可视化呈现于所述显示单元5的显示屏51上,可供医生在手术治疗过程中进行实时观察、监控。
46.在一些实施例中,在进行交联治疗时,所述控制单元6通过内置程序,根据实时检
测模块图像处理单元4分析所得角膜地形自动生成交联图案,并控制光源单元1的紫外光束输出,从而完成角膜地形成像指导的角膜交联散光矫正术。所述角膜地形成像指导的角膜交联散光矫正术在本系统中具体设置如下:内置程序基于患者的角膜前表面高度图进行交联图案设计,选取以瞳孔为中心,直径4mm至9mm间的圆环,在此环形范围内相对高度大于零(即绝对高度高于标准眼)的各点所形成的区域被划定为交联图案,交联能量为0-30mw/cm2中的某一数值(具体输出能量为内置程序根据交联区域内的相对高度范围及角膜散光度数而定),紫外光呈脉冲式(开1秒,关1秒),治疗时间为1000秒。在输出交联图案紫外光束时,控制单元6通过实时检测模块可实现实时眼球跟踪定位,实现精准定位散光治疗轴。所述存储单元7将图像处理单元4整合处理后的眼部形态及分析所得角膜地形以手术录像及图片的形式进行存储,可完成手术过程的记录并供术后调取观看及分析。
47.在一些实施例中,所述供氧单元2由供氧眼罩、输出管道、氧气产生装置、氧气浓度检测装置组成,在治疗过程中完成氧气的持续输出及浓度实时检测,保证治疗过程中氧气浓度大于等于95%,以高氧环境提高交联效果,从而允许所述手术保留角膜上皮以减少术后不适感。
48.以下结合附图进一步描述本发明具体实施例的特征、原理和优点。
49.参阅图1至图2,在一种实施例中,一种角膜地形成像指导的可视化精准角膜交联散光矫正系统,包括交联治疗模块、实时检测模块和控制存储模块。所述交联治疗模块由光源单元1中的紫外光部分11、供氧单元2组成,该模块用于投影脉冲式输出定制化角膜交联光斑。所述实时检测模块由光源单元1中的白光部分12、成像单元3、图像处理单元4、显示单元5组成,该模块用于实时检测并显示治疗前、治疗时及治疗后的眼部形态及角膜地形成像,所述角膜地形成像通过分析投影于角膜上的placido环图像实现。所述控制存储模块由控制单元6、存储单元7组成,该模块可根据实时检测模块形成的角膜高度图自动生成定制化角膜交联图案方案,然后通过所述交联治疗模块输出光斑进行治疗,此外,该模块还将所述实时检测模块所记录的眼部形态及角膜地形成像变化以手术录像及图片形式储存。
50.通过在治疗过程中实时检测地形变化、精准定位散光治疗轴,并据此动态实时输出治疗图案,能够减少检测和治疗过程患者体位变化、眼球旋转等引起的定位偏差,在角膜地形成像指导下进行交联散光矫正,极大提高交联输出图案的准确度,达到更好的手术治疗效果。
51.参阅图1至图3,在优选的实施例中,光源单元1中包括具有微反射镜阵列的数字化光投影芯片13,所述数字化光投影芯片可将准直光束细分为小光束,并在控制单元6的控制下按设定方式选择反射或不反射各个小光束,最终在角膜上形成预设的光束投影。所述准直光束为光机发出后经过准直透镜准直后的光束,包括用于交联治疗的紫外光部分11和用于实时检测的白光部分12,二者均可脉冲式/非脉冲式发光。
52.在优选的实施例中,患者仰卧位进行手术治疗,在完成体位摆放、消毒铺巾、核黄素浸泡(可参考方案:0.25%核黄素溶液,每90秒滴加一次,持续4分钟;后用0.22%核黄素溶液冲洗眼表,并以相同的速率继续滴注6分钟)等一系列术前准备后,在系统中进行术前角膜地形检测步骤,该检测由实时检测模块完成相关工作。此时,光源单元1中的白光部分12呈非脉冲式(持续式)输出placido环图像投影,所述placido环图像为明暗相间的同心环,当角膜表面半径为7.94的标准球面时,在准确对焦位置上,光源单元1所输出的placido
图像在角膜表面形成的投影为宽度相等、间隔相等的明(白光)暗相间同心环;若角膜表面偏离标准球面,则所形成的投影环位置发生变化,根据环上各点位置变化比对数据库分析可计算获得角膜形貌。由成像单元3采集眼部形态及角膜表面所形成的placido成像投影,该单元由四个摄像头组成,摄像头31、32、33、34分别位于眼球上方12点钟、3点钟、6点钟、9点钟方位,可采集眼球形貌及角膜表面投影图像。进一步地,图像处理单元4将成像单元3所采集图像进行整合以减少成像误差,并分析光源单元1白光部分12所形成的角膜投影,选取placido投影在360个半子午线的点,比对数据库计算各点位置变化,通过内置程序进行球面拟合,以240*240点阵计算各点角膜相对高度(与标准球面相比)、曲率半径及曲率,生成角膜地形,并通过显示单元5将分析所得角膜地形可视化呈现于显示屏51上,包括但不限于角膜前表面高度图及角膜前表面切向曲率图。所生成的角膜地形将作为本系统定制个性化精准角膜交联散光矫正方案的蓝图,据此开始后续角膜地形成像指导的可视化散光矫正。
53.在优选实施例中,完成术前角膜地形检测后,接下来可进行可视化精准角膜交联散光矫正步骤。此时,所述控制单元6可通过内置程序,基于患者的角膜前表面高度图进行交联图案设计,选取以瞳孔为中心,直径4mm至9mm间的圆环,在此环形范围内相对高度大于零(即绝对高度高于标准眼)的各点所形成的区域被划定为交联图案,交联能量为0-30mw/cm2中的某一数值(具体输出能量为内置程序根据交联区域内的相对高度范围及角膜散光度数而定)。然后,光源单元1中的紫光部分11在控制单元6控制下,以前述内置程序所设计图案呈脉冲式(开1秒,关1秒)发光,从而在准确对焦位置上,形成相应的角膜表面紫外光投影,在指定区域发生紫外光-核黄素-角膜氧化交联反应以治疗散光,治疗时间为1000秒。进一步地,在治疗过程中可同时完成角膜地形实时检测,光源单元1中的白光部分在控制单元6控制下,以placido环图像呈脉冲式(关1秒,开1秒)发光,从而在准确对焦位置上,形成placido环图像投影。成像单元3的摄像头31、32、33、34共同完成眼部形态及placido成像投影的采集,由图像处理单元4进行整合并分析对比数据库计算角膜相对高度、曲率半径及曲率,实时生成角膜地形。进一步地,控制单元6通过内置程序,根据分析所得角膜地形自动同步生成交联图案,并实行眼球跟踪定位,据此调整光源单元1的紫外光束输出,实现精准定位散光治疗轴,完成角膜地形成像指导的精准角膜交联散光矫正术。因此,控制单元控制下的紫外光和白光呈脉冲式交替出现,即交联治疗与实时检测互不冲突,交替进行,同步完成,从而实现实时精准定位散光治疗轴及实时检测治疗效果。
54.在优选的实施例中,治疗后进入术后角膜地形检测步骤,同样以上述所提及的方式进行角膜地形检测,从而观察最终治疗效果。
55.在优选的实施例中,该系统还包括了供氧单元2,其由供氧眼罩21、输出管道22、氧气产生装置23、氧气浓度检测装置24组成,在治疗全程完成氧气的持续输出及浓度实时检测,保证治疗过程中氧气浓度大于等于95%,以高氧环境提高交联效果,从而允许所述手术保留角膜上皮以减少术后不适感。供氧单元2也在控制单元6内置程序控制下进行工作。
56.在优选的实施例中,显示单元5在治疗过程中,还可将实时可视化呈现图像处理单元4整合处理后的眼部形态及分析所得角膜地形,供手术医生进行实时观察及监测。显示单元5也在控制单元6内置程序控制下进行工作。
57.在优选的实施例中,该系统还包括了存储单元7,其将图像处理单元整合处理后的眼部形态及分析所得角膜地形以手术录像及图片的形式进行存储,包括术前、术中、术后,
可完成手术过程的记录并供术后长期调取观看及分析。储存单元7也在控制单元6内置程序控制下进行工作。
58.在其他实施例中,变形方案可以是没有在术后再次进行角膜地形检测,或没有供氧单元,或没有实时可视化呈现眼部形态及角膜地形,或没有存储单元等。
59.另外,其他的实施例还可以包括对治疗图案进行能量密度梯度设置,在角膜上形成具有能量密度梯度的紫外线光束投影,激发核黄素产生自由基,不同程度地催化不同位置的角膜基质层胶原纤维间的氧化交联。
60.图4示出了本发明实施例的角膜地形成像指导的可视化精准角膜交联散光矫正系统的动物实验结果。
61.本发明实施例的优点包括:
62.a.角膜交联治疗与角膜地形检测一体化:完成角膜交联治疗与角膜地形检测的原位结合,在治疗前进行地形检测完成初步交联方案设定,在治疗过程中实时检测地形变化、精准定位散光治疗轴,并据此动态实时输出治疗图案,从而减少检测和治疗过程患者体位变化、眼球旋转等引起的定位偏差,在角膜地形成像指导下进行交联散光矫正,极大提高交联输出图案的准确度,能达到更好的手术治疗效果,提供了精准、个性化交联治疗散光的可能。
63.b.通过角膜交联进行散光矫正:目前仍未有通过角膜交联进行散光矫正的具体实施方法,而本发明在已有实验结果论证的基础上,具体化了一种可通过角膜交联进行非侵入性散光矫正的系统及方法,实现了无创性矫正散光的突破。
64.c.个体化:通过内置的治疗方案设计算法,可以根据患者的角膜地形图实时进行个体化、定制化的治疗方案设计。
65.d.动态角膜成像引导治疗:根据实时检测的地形变化精准定位散光治疗轴,并动态实时输出治疗图案,实现动态角膜成像引导的精准交联。
66.e.可视化:在治疗过程中将眼部形态及角膜地形变化进行实时可视化呈现,因而手术医生可以全程观察、监控,人机双重监测以提高治疗的精准度和准确性。
67.f.可记录、可追溯:本系统可将治疗前、治疗中、治疗后的眼部形态及分析所得角膜地形以手术录像及图片的形式进行存储,可完成手术过程的记录并供术后长期调取观看及分析。
68.g.可预测:通过内置的数学模型计算,可预测该治疗方案下的术后散光矫正量。
69.本发明的背景部分可以包含关于本发明的问题或环境的背景信息,而不一定是描述现有技术。因此,在背景技术部分中包含的内容并不是申请人对现有技术的承认。
70.以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例
中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。