技术特征:
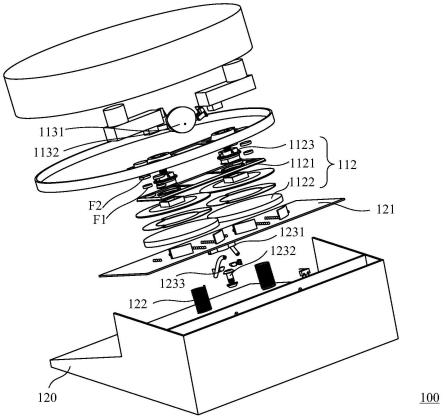
1.一种清洁系统,其特征在于,包括:清洁机器人,包括机身、第一清洁组件以及推动组件,所述第一清洁组件可拆卸设置于所述机身底部,所述推动组件至少部分设置于所述机身内并与所述第一清洁组件连接;以及清洁基站,其中,当所述清洁机器人与所述清洁基站对接时,所述推动组件能够推动所述第一清洁组件从第一状态转变为第二状态和/或从所述第二状态转变为第三状态。2.如权利要求1所述的清洁系统,其特征在于,所述机身具有机身底面,所述第一清洁组件具有能够接触并清洁地面的清洁面,所述第一清洁组件可拆卸设置于所述机身底部,在所述第一状态,所述清洁面与所述机身底面之间具有第一距离,在所述第二状态,所述清洁面与所述机身底面之间具有第二距离,在所述第三状态,所述清洁面与所述机身底面之间具有第三距离,所述第三距离大于所述第二距离,所述第二距离大于所述第一距离。3.如权利要求1所述的清洁系统,其特征在于,所述清洁基站包括承载板、锁位组件和第一弹性件,在所述第一状态,所述第一清洁组件与所述机身连接,在所述第二状态,所述第一清洁组件与所述机身分离,所述承载板承载所述第一清洁组件,所述锁位组件将所述承载板锁位,在所述第三状态,所述锁位组件将所述承载板解锁,所述第一弹性件用于在所述承载板解锁后带动所述第一清洁组件回复至所述第一状态。4.如权利要求3所述的清洁系统,其特征在于,所述清洁基站还包括基站底板,所述第一弹性件将所述承载板与所述基站底板弹性连接,所述锁位组件包括:夹持装置,设置于所述承载板;锁位柱,与所述基站底板固定连接,所述夹持装置夹持所述锁位柱时,所述锁位组件将所述承载板锁位;以及解锁件,设置于所述锁位柱,所述解锁件解除所述夹持装置对所述锁位柱的夹持时,所述锁位组件将所述承载板解锁。5.如权利要求4所述的清洁系统,其特征在于,所述夹持装置包括安装架以及至少一对夹持组件,每个所述夹持组件包括夹持块以及与第二弹性件,所述第二弹性件将所述夹持块与所述安装架连接,所述第二弹性件使得每对所述夹持组件的两个所述夹持块彼此靠近。6.如权利要求5所述的清洁系统,其特征在于,所述锁位柱包括导向部和锁位部,所述导向部连接于所述锁位部与所述基站底板之间,所述锁位部的最大外周尺寸大于所述导向部的外周尺寸,所述锁位部具有朝向所述基站底板的卡接面,所述夹持块与所述卡接面抵接时,所述锁位组件将所述承载板锁位,其中,所述锁位部具有第一渐变段,沿从所述承载板到所述基站底板的方向,所述第一渐变段的外周面到所述导向部中心轴的距离逐渐变大。7.如权利要求6所述的清洁系统,其特征在于,所述解锁件包括沿所述导向部的轴向可滑动地设置于所述导向部外周的滑块,所述滑块具有第二渐变段,沿从所述承载板到所述基站底板的方向,所述第二渐变段的外周面到所述导向部中心轴的距离逐渐变小,每对所述夹持组件的两个所述包括夹持块的彼此相向的表面为夹持面,所述夹持块具
有第三渐变段,沿从所述承载板到所述基站底板的方向,所述第三渐变段的所述夹持面到所述导向部中心轴的距离逐渐变大,所述夹持块夹持所述滑块的所述第二渐变段时,所述锁位组件将所述承载板解锁。8.如权利要求7所述的清洁系统,其特征在于,所述滑块具有通过滑动能够与所述卡接面接合的接合面,所述接合面能够覆盖所述卡接面。9.如权利要求1所述的清洁系统,其特征在于,所述推动组件包括:转动驱动件;以及凸轮,所述转动驱动件驱动所述凸轮旋转,所述凸轮的外周与所述第一清洁组件抵接,所述凸轮的外周具有第一端点、第二端点和第三端点,所述第一端点、所述第二端点、所述第三端点分别到所述凸轮的转动中心的距离递增,所述第一端点与所述第一清洁组件抵接时,所述第一清洁组件处于所述第一状态,所述第二端点与所述第一清洁组件抵接时,所述第一清洁组件处于所述第二状态,所述第三端点与所述第一清洁组件抵接时,所述第一清洁组件处于所述第三状态。10.如权利要求9所述的清洁系统,其特征在于,所述清洁机器人还包括第一状态检测器和第二状态检测器,所述第一状态检测器和所述第二状态检测器设置于所述凸轮的外周侧,并与所述转动驱动件电连接,所述第一状态检测器用于在所述凸轮转动至使得所述第一清洁组件处于所述第一状态时提供第一到位信息,所述第二状态检测器用于在所述凸轮转动至使得所述第一清洁组件处于所述第二状态时提供第二到位信息。11.如权利要求10所述的清洁系统,其特征在于,所述第一状态检测器为第一微动开关,在所述凸轮转动至使得所述第一清洁组件处于所述第一状态时,所述凸轮的所述第三端点接触所述第一微动开关,使得所述第一微动开关提供所述第一到位信息,所述第二状态检测器为光线传感器,在所述凸轮转动至使得所述第一清洁组件处于所述第二状态时,所述凸轮的所述第三端点遮挡所述光线传感器,使得所述光线传感器提供所述第二到位信息。12.如权利要求10所述的清洁系统,其特征在于,所述清洁基站还包括第三状态检测器,所述第三状态检测器设置于所述承载板与所述基站底板之间,所述第三状态检测器用于在所述第一清洁组件处于所述第三状态时提供第三到位信息。13.如权利要求12所述的清洁系统,其特征在于,所述第三状态检测器为第二微动开关,在所述承载板移动至使得所述第一清洁组件处于所述第三状态时,所述承载板接触所述第二微动开关,使得所述第二微动开关提供所述第三到位信息。14.如权利要求1所述的清洁系统,其特征在于,所述第一清洁组件包括连接板、清洁件以及连接器,所述连接器将所述清洁件活动安装于所述连接板,所述清洁机器人还包括驱动组件,所述驱动组件与所述连接器可拆卸连接,所述机身、所述连接板中的至少一者设有吸附件,所述吸附件能够将所述连接板与所述机身吸附连接。
技术总结
本发明涉及清洁设备领域,公开一种清洁系统,包括清洁机器人,包括机身、第一清洁组件以及推动组件,所述第一清洁组件可拆卸设置于所述机身底部,所述推动组件至少部分设置于所述机身内并与所述第一清洁组件连接;以及清洁基站,其中,当所述清洁机器人与所述清洁基站对接时,所述推动组件能够推动所述第一清洁组件从第一状态转变为第二状态和/或从所述第二状态转变为第三状态。从而实现通过推动组件实现第一清洁组件在多个状态之间切换,使得第一清洁组件自动与所述机身连接或者分离,从而实现自动拆装操作,节省人力。节省人力。节省人力。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:2022.07.29
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。