1.本发明属于电力领域,涉及一种基于人工智能图像技术的耐张线夹缺陷检测方法。
背景技术:
2.输电线路主要用于传输电能,是电力系统中重要的组成部分,在日常运维中最为严重的故障为断线,极有可能引发次生灾害。部分断线故障原因为耐张线夹压接(尤其是钢锚与铝线的压接)质量不合格,使钢锚压模出口处的钢芯受力状况较其它部位恶劣,在负荷大幅增加的情况下耐张管温度过高,使铝管内的钢芯因过热而强度明显降低,当耐张力大于钢芯的承受力时发生韧性断裂失效。
3.对于耐张线夹缺陷检测,现有方法中,主要是全面梳理线路开工、迁改、异动等工作后,对新旧分界点处的耐张线夹的基础台账建立专档,积极开展红外测温、紫外成像的常规检测,并利用停机机会开展x光无损探伤检测,避免该类不安全事件的再次发生。
4.输电线路耐张线夹在长期使用中,由于压接质量问题或电缆张力过大导致导线断裂。日常非停电巡检中无法利用数字化射线成像检测技术对耐张线夹进行内部检测,或者无人机搭载数字化射线成像检测仪无法大规模巡检,使得耐张线夹长期使用中存在隐患发生。
技术实现要素:
5.本发明的目的是提供一种基于人工智能图像技术的耐张线夹缺陷检测方法,基于人工智能图像技术,对无人机巡检图片进行大规模分析,利用图像识别技术精确识别耐张线夹各部件位置,观测钢芯是否超出压接线的合理范围,并提出及时的预警。
6.本发明的目的通过以下技术方案实现:
7.一种基于人工智能图像技术的耐张线夹缺陷检测方法,包括如下步骤:
8.步骤一,收集含有耐张线夹的无人机巡检图片,手工标注所述样本图片中耐张线夹主体部分,压接区域和钢锚环区域的位置坐标;
9.步骤二,采用yolov5卷积神经网络训练耐张线夹主体部分,压接区域和钢锚环区域检测模型;
10.步骤三,根据压接区域的中心坐标和刚锚环区域的中心坐标,将耐张线夹主体旋转到水平位置,并裁切出耐张线夹主体部分进行后续分析;
11.步骤四,对旋转裁切后的耐张线夹主体进行精细标注,标注出压接区域和钢锚环区域的精确位置坐标;
12.步骤五,采用cascadercnn卷积神经网络训练压接区域和钢锚环区域精确检测模型;
13.步骤六,通过比较l1,l2和d的关系,确认耐张线夹是否存在缺陷以及缺陷等级。
14.在本发明所述的基于人工智能图像技术的耐张线夹缺陷检测方法中,所述步骤三
进一步包括:
15.(c1)获得压接区域1位置中心坐标(mid_yj1.x,mid_yj1.y),压接区域2 置中心坐标(mid_yj2.x,mid_yj2.y),钢锚环区域位置中心坐标(mid_h.x, mid_h.y);
16.(c2)根据耐张线夹的物理特性,压接区域1,压接区域2,钢锚环区域在同一直线上;压接区域1和钢锚环区域之间的角度angle1=arctg(mid_h.x
‑ꢀ
mid_yj1.x)/(mid_h.y-mid_yj1.y),压接区域2和钢锚环区域之间的角度angle2 =arctg(mid_h.x-mid_yj2.x)/(mid_h.y-mid_yj2.y),平均角度作为画面旋转的角度 angle=(angle1 angle2)/2;
17.(c3)根据图像旋转原理:
[0018][0019]
将原始图像(x,y)旋转angle后得到新图像(x’,y’),并裁剪出耐张线夹主体部分。
[0020]
在本发明所述的基于人工智能图像技术的耐张线夹缺陷检测方法中,所述步骤四进一步包括:
[0021]
对压接区域和钢锚环区域的边界做精确标注,用于测算距离并进行比对;
[0022]
在本发明所述的基于人工智能图像技术的耐张线夹缺陷检测方法中,所述步骤五进一步包括:
[0023]
(f1)利用压接区域和钢锚环区域精确检测模型获得压接区域精确位置坐标(yj.x1,yj.y1,yj.x2,yj.y2)和钢锚环区域精确位置坐标(gmh.x1,gmh.y1, gmh.x2,gmh.y2);
[0024]
(f2)定义铝管直径d=|yj.y2
–
yj.y1|,钢锚环到压接区域前端距离 l1=|yj.x1
–
gmh.x2|,钢锚环到压接区域后端距离l2=|yj.x2
–
gmh.x2|;
[0025]
(f3)由于像素距离和实际距离存在比例关系,通过耐张线夹型号已知铝管直径d的实际长度d,可以计算l1,l2的实际长度:
[0026][0027][0028]
(f4)判断len1和len2的大小,根据耐张线夹缺陷判定表查询对应耐张线夹的型号参数,判断是否存在缺陷。
[0029]
本发明具有以下有益效果:
[0030]
仅需要图像识别就可以检测出耐张线夹是否存在缺陷;可以配合无人机巡检完成大规模多频率的巡检工作;采用目标识别的方案和标注方法获得精确的尺度数据,替代了复杂的目标分割算法;根据len1和len2的数据变化,可以预判耐张线夹的安全隐患。
附图说明
[0031]
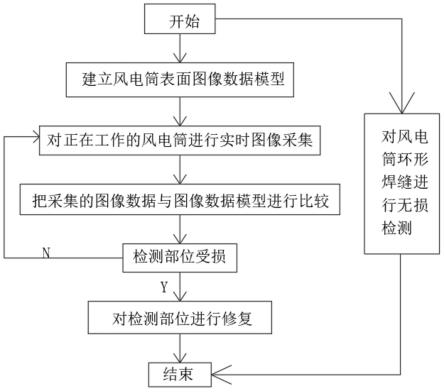
图1为本发明基于人工智能图像技术的耐张线夹缺陷检测方法一个实施例中的流程图;
[0032]
图2为对旋转裁切后图像进行精确检测示意图;
具体实施方式
[0033]
一种基于人工智能图像技术的耐张线夹缺陷检测方法,流程图如图1所示。包含的步骤如下:
[0034]
步骤s01获取无人机耐张线夹巡检图片,手工标注出样本图片中耐张线夹主体部分,压接区域和钢锚环区域的位置坐标:本步骤中,搜集无人机采集的样本图片,手工标注出样本图片中耐张线夹,压界和环的位置坐标。
[0035]
步骤s02采用yolov5卷积神经网络训练耐张线夹主体部分检测模型,并从原图中裁切耐张线夹主体部分:本步骤中,采用yolov5深度卷积神经网络训练耐张线夹主体检测模型,获得检测出来的耐张线夹主体部分位置坐标,从原图中裁切出耐张线夹主体部分图片,供后续更小部件检测提供有利条件。
[0036]
步骤s03采用yolov5卷积神经网络训练压接区域和钢锚环区域粗粒度检测模型:本步骤中,采用yolov5卷积神经网络训练压接区域和钢锚环区域粗粒度检测模型,用于初步定位压界和环的位置。
[0037]
步骤s04获取压接区域和钢锚环区域的中心坐标,计算旋转角度,并旋转图片:本步骤通过压界和环的粗粒度检测模型,分别获取到压界和环的矩形框坐标:压界1(yj1.x1,yj1.y1,yj1.x2,yj1.y2),压界2(yj2.x1,yj2.y1, yj2.x2,yj2.y2),环h(h.x1,h.y1,h.x2,h.y2),计算压界1位置中心坐标 (mid_yj1.x=(yj1.x2-yj1.x1)/2,mid_yj1.y=(yj1.y2-yj1.y1)/2),压界2置中心坐标(mid_yj2.x=(yj2.x2-yj2.x1)/2,mid_yj2.y=(yj2.y2-yj2.y1)/2),环位置中心坐标(mid_h.x=(h.x2-h.x1)/2,mid_h.y=(h.y2-h.y1)/2);
[0038]
根据耐张线夹的物理特性,压界1,压界2,环的中心位置基本在同一直线上;根据三角函数关系,压界1和环之间的角度angle1=arctg(mid_h.x
‑ꢀ
mid_yj1.x)/(mid_h.y-mid_yj1.y),压界2和环之间的角度angle2=arctg(mid_h.x-mid_yj2.x)/(mid_h.y-mid_yj2.y),平均角度作为画面旋转的角度 angle=(angle1 angle2)/2;
[0039]
根据角度angle将耐张线夹主体旋转,保持压界1,压界2和环在同一水平位置上,如图2所示。
[0040]
步骤s05采用cascadercnn卷积神经网络训练压接区域和钢锚环区域细粒度检测模型,获取l1,l2,d的数据,判断耐张线夹的隐患等级。本步骤中,采用cascadercnn卷积神经网络训练压接区域和钢锚环区域细粒度检测模型,获取环的精确位置坐标(gmh.x1,gmh.y1,gmh.x2,gmh.y2)以及靠近环的压界精确位置坐标(yj.x1,yj.y1,yj.x2,yj.y2)。
[0041]
分别计算d,l1,l2的数值。铝管直径d=|yj.y2
–
yj.y1|,钢锚环到压接区域前端距离l1=|yj.x1
–
gmh.x2|,钢锚环到压接区域后端距离l2=|yj.x2
ꢀ–
gmh.x2|。
[0042]
参考耐张线夹缺陷判定表(表1),查找对应耐张线夹型号,通过比例判据判断耐张线夹存在的安全隐患等级。
[0043]
表1
[0044][0045]
本发明仅利用图像识别的方法,无需数字化射线成像设备,可以规模化定期巡检耐张线夹缺陷状态,解决耐张线夹使用中安全检测的难题。
[0046]
以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。