1.本发明属于裂缝测量技术领域,特别涉及一种用于矿区地面沉降裂缝测量装置。
背景技术:
2.由于矿区周围土体在采矿过程中的动态变化地面会出现塌陷及沉降导致地面裂开缝隙,为了保障矿区的生产安全需对地表沉降等监测,当地面出现裂缝时,需实时测量裂缝的大小及沉降的数据,便于预先估算和及时采取相应的措施。目前科研人员在对矿区地面勘察测量时,一般通过卷尺或皮尺等测量工具直接测量地裂缝张开距离和下错距离,但测量工具的水平度和垂直度难以保证,使所测数据误差较大,不利于后续分析工作的开展。
3.如专利文件:申请号为202110336685.7,公开的一种便携式地裂缝测量装置,该装置结构简单,便于携带、易于操作,能够保证测量的水平度和垂直度,并快速标定测量起点和测量终点,所测数据的准确度更高。
4.但该装置仍存在以下缺陷:
5.不便于对矿区的裂缝不同位置的缝宽量测,以及缝隙两侧地面沉降深度测量,从而使后续分析的数据不够完善,因此我们需要提出一种用于矿区地面沉降裂缝测量装置来解决上述存在的问题。
技术实现要素:
6.针对上述问题,本发明提供了一种用于矿区地面沉降裂缝测量装置,包括支撑组件、升降组件、检测组件、主控屏和底部安装有万向轮的底板,所述底板的上表面固定有支架,所述支架的一侧安装有两个把手,所述主控屏安装在支架的上端,所述支撑组件固定在底板的上表面,且所述支撑组件与支架的一侧固定,所述升降组件的一端与支架的上端连接,所述升降组件的另一端与检测组件连接,所述检测组件包括中空的竖管和锥形的检测头,所述检测头的上端固定在竖管的下端,所述竖管上安装有移动组件,所述移动组件上安装有定位板,所述定位板上安装有缝宽测量组件和沉降测量组件,且所述缝宽测量组件的安装方向与沉降测量组件安装方向垂直,所述定位板的中心开设有矩形的开孔,所述缝宽测量组件安装在开孔的内部;
7.所述缝宽测量组件包括驱动机构、双向螺杆和导向杆,所述双向螺杆的两端转动连接在开孔的相对两侧,所述双向螺杆的两端螺纹连接有测距板,所述测距板的下边缘与定位板的下表面平齐,两个所述测距板的一端均与开孔的另一侧滑动连接,所述双向螺杆的一端固定有从动齿轮,所述从动齿轮通过驱动机构驱动;
8.所述沉降测量组件包括第三马达、第二螺杆、l形杆和移动块,所述第三马达安装在支撑杆上,所述第二螺杆的两端分别与定位板的上表面和支撑杆转动连接,所述第二螺杆的一端穿过支撑杆与第三马达的输出轴连接,所述l形杆的一端螺纹连接在第二螺杆上,且所述l形杆的一端与其中一个连接杆滑动连接,所述l形杆的另一端与移动块固定,所述移动块的上表面固定有第一反射板,所述支撑杆上固定有第一红外测距传感器。
9.进一步的,所述升降组件包括电动推杆和固定座,所述电动推杆的一端固定在横板的下表面,所述电动推杆的活塞杆端与固定座的一端连接,所述固定座的另一端与竖管的上端固定。
10.进一步的,所述支撑组件包括竖板和横板,所述竖板的一端垂直固定在横板的一端,所述横板的一侧与主控屏的侧壁固定。
11.进一步的,所述移动组件包括第一螺杆、支撑杆和第一马达,所述第一螺杆转动安装在竖管的内部,所述第一螺杆的一端穿过竖管的上端与第一马达的输出轴连接,所述第一马达的支撑座固定在竖管的上端,且所述固定座的另一端开设有供第一马达让位的让位孔,所述支撑杆的中部螺纹连接在第一螺杆上,所述支撑杆的两端穿过竖管的侧壁垂直固定有连接杆,且所述竖管上开设有供支撑杆两端滑动的第一滑槽,所述连接杆的一端与定位板的上表面固定。
12.进一步的,所述驱动组件包括固定块、第二马达和主动齿轮,所述固定块固定在定位板的上表面,所述第二马达安装在固定块上,所述主动齿轮安装在第二马达的输出轴上,且所述主动齿轮与从动齿轮啮合。
13.进一步的,所述测距板包括滑动块和检测块,所述滑动块上开设有供双向螺杆螺接的螺孔,所述检测块的一侧与滑动块的一侧固定,所述滑动块上设置有距离感应机构,所述检测块的另一侧设置有斜面,且所述检测块的斜面与检测头的斜面对应。
14.进一步的,所述距离感应机构包括第二红外测距传感器和第二反射板,所述第二红外测距传感器固定在其中一个滑动块一侧的下边缘位置,所述第二反射板固定在另一个滑动块一侧的下边缘位置。
15.进一步的,所述滑动块的一端一体成型有凸块,所述开孔的另一侧开设有供两个凸块滑动的第二滑槽,所述双向螺杆的下方设置有导向杆,两个所述滑动块均滑动连接在导向杆上。
16.进一步的,所述l形杆的一端一体成型有凸起,其中一个所述连接杆的一侧开设有供凸起滑动的第三滑槽。
17.进一步的,所述主控屏分别与第一马达、第二马达、第三马达、电动推杆、第一红外测距传感器和第二红外测距传感器电性连接,所述定位板和移动块的下表面以及检测块的斜面均嵌装有触碰传感器,多个所述触碰传感器均与主控屏电性连接。
18.本发明的有益效果是:
19.1、本发明通过检测组件、缝宽测量组件和沉降测量组件的配合,使升降组件带动检测组件移动,检测头插入缝隙的内部,且检测头的外壁与缝隙的两侧贴合为止,通过定位板选取缝隙一侧的定位参照点,再通过缝宽测量组件和沉降测量组件分别测量缝隙的缝宽和缝隙另一侧沉降的深度,通过对裂缝缝宽和沉降深度测量,为后续分析提供了多种数据,有利于对后续分析数据的完善。
20.2、本发明通过底板与支撑组件的配合,便于在对裂缝不同位置缝宽测量时进行移动,提高裂缝不同位置测量时的便捷性。
21.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
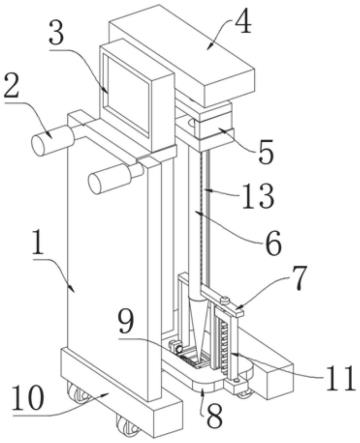
23.图1示出了根据本发明实施例的结构示意图;
24.图2示出了根据本发明实施例的支撑组件和升降组件结构示意图;
25.图3示出了根据本发明实施例的移动组件和检测组件结构示意图;
26.图4示出了根据本发明实施例的缝宽测量组件结构示意图;
27.图5示出了根据本发明实施例的缝宽测量组件爆炸结构示意图;
28.图6示出了根据本发明实施例的沉降测量组件结构示意图。
29.图中:1、支架;2、把手;3、主控屏;4、支撑组件;401、竖板;402、横板;5、升降组件;501、固定座;502、电动推杆;6、检测组件;601、竖管;602、检测头;7、移动组件;701、第一螺杆;702、支撑杆;703、连接杆;704、第一马达;8、定位板;9、缝宽测量组件;901、驱动机构;9011、固定块;9012、第二马达;9013、主动齿轮;902、双向螺杆;903、测距板;9031、检测块;9032、滑动块;9033、凸块;904、导向杆;10、底板;11、沉降测量组件;1101、第三马达;1102、第二螺杆;1103、l形杆;1104、移动块;1105、第三滑槽;1106、凸起;12、让位孔;13、第一滑槽;14、第一红外测距传感器;15、开孔;16、第二滑槽;17、第一反射板;18、第二红外测距传感器。
具体实施方式
30.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本发明实施例提供了一种用于矿区地面沉降裂缝测量装置,如图1和图3所示,包括支撑组件4、升降组件5、检测组件6、主控屏3和底部安装有万向轮的底板10,所述底板10的上表面固定有支架1,所述支架1的一侧安装有两个把手2,所述主控屏3安装在支架1的上端,所述支撑组件4固定在底板10的上表面,且所述支撑组件4与支架1的一侧固定,所述升降组件5的一端与支架1的上端连接,所述升降组件5的另一端与检测组件6连接,所述检测组件6包括中空的竖管601和锥形的检测头602,所述检测头602的上端固定在竖管601的下端,所述竖管601上安装有移动组件7,所述移动组件7上安装有定位板8,所述定位板8上安装有缝宽测量组件9和沉降测量组件11,且所述缝宽测量组件9的安装方向与沉降测量组件11安装方向垂直。
32.所述定位板8的中心开设有矩形的开孔15,所述缝宽测量组件9安装在开孔15的内部,所述开孔15的长和宽均大于竖管601的直径,便于定位板8可以在竖管601上向上或向下移动。
33.如图2所示,所述底板10上设置有缺口,所述底板10与缺口对齐,使检测组件6可以穿过缺口对地面的裂缝进行测量,所述支撑组件4包括竖板401和横板402,所述竖板401的
一端垂直固定在横板402的一端,所述横板402的一侧与主控屏3的侧壁固定,通过支撑组件4对升降组件5和检测组件6支撑和固定。
34.所述升降组件5包括电动推杆502和固定座501,所述电动推杆502的一端固定在横板402的下表面,所述电动推杆502的活塞杆端与固定座501的一端连接,所述固定座501的另一端与竖管601的上端固定,通过电动推杆502带动固定座501上下移动,使固定座501带动检测组件6上下移动。
35.如图3所示,所述移动组件7包括第一螺杆701、支撑杆702和第一马达704,所述第一螺杆701转动安装在竖管601的内部,所述第一螺杆701的一端穿过竖管601的上端与第一马达704的输出轴连接,所述第一马达704的支撑座固定在竖管601的上端,且所述固定座501的另一端开设有供第一马达704让位的让位孔12,所述支撑杆702的中部螺纹连接在第一螺杆701上,所述支撑杆702的两端穿过竖管601的侧壁垂直固定有连接杆703,且所述竖管601上开设有供支撑杆702两端滑动的第一滑槽13,所述连接杆703的一端与定位板8的上表面固定,通过第一马达704带动第一螺杆701转动,由于第一螺杆701与支撑杆702的螺纹配合,使支撑杆702是第一螺杆701上向上或向下移动,通过第一支撑杆702带动定位板8移动,便于将定位板8与地面贴合,用于测量时起点参照点选择。
36.如图4和图5所示,所述缝宽测量组件9包括驱动机构901、双向螺杆902和导向杆904,所述双向螺杆902的两端转动连接在开孔15的相对两侧,所述双向螺杆902的两端螺纹连接有测距板903,所述测距板903的下边缘与定位板8的下表面平齐,两个所述测距板903的一端均与开孔15的另一侧滑动连接,所述双向螺杆902的一端固定有从动齿轮,所述从动齿轮通过驱动机构901驱动,在缝宽测量时,通过驱动机构901带动双向螺杆902转动,双向螺杆902带动两个测距板903相对移动,使两个测距板903的一侧抵触在检测头602相对的两侧,便于量测检测头602位于缝隙处的直径,从而量测缝隙的宽度。
37.所述驱动组件包括固定块9011、第二马达9012和主动齿轮9013,所述固定块9011固定在定位板8的上表面,所述第二马达9012安装在固定块9011上,所述主动齿轮9013安装在第二马达9012的输出轴上,且所述主动齿轮9013与从动齿轮啮合,通过第二马达9012带动主动齿轮9013转动,主动齿轮9013通过与从动齿轮的啮合带动双向螺杆902转动,便于双向螺杆902带动测距板903相对移动。
38.所述测距板903包括滑动块9032和检测块9031,所述滑动块9032上开设有供双向螺杆902螺接的螺孔,所述检测块9031的一侧与滑动块9032的一侧固定,所述滑动块9032上设置有距离感应机构,所述检测块9031的另一侧设置有斜面,且所述检测块9031的斜面与检测头602的斜面对应,使检测块9031可以与检测头602的外壁服帖。
39.所述距离感应机构包括第二红外测距传感器18和第二反射板,所述第二红外测距传感器18固定在其中一个滑动块9032一侧的下边缘位置,所述第二反射板固定在另一个滑动块9032一侧的下边缘位置,通过红外测距传感器发出的红外光至第二反射板上,并通过第二反射板反射来测量两个滑动块9032之间的距离,不需人工使用测量工具测量,提高了测量的精准度。
40.所述滑动块9032的一端一体成型有凸块9033,所述开孔15的另一侧开设有供两个凸块9033滑动的第二滑槽16,所述双向螺杆902的下方设置有导向杆904,两个所述滑动块9032均滑动连接在导向杆904上,通过导向杆904和凸块9033与第二滑槽16的配合,使滑动
块9032在移动时可进行水平直线移动,一定程度上提高检测块9031测量的准确度。
41.如图6所示,所述沉降测量组件11包括第三马达1101、第二螺杆1102、l形杆1103和移动块1104,所述第三马达1101安装在支撑杆702上,所述第二螺杆1102的两端分别与定位板8的上表面和支撑杆702转动连接,所述第二螺杆1102的一端穿过支撑杆702与第三马达1101的输出轴连接,所述l形杆1103的一端螺纹连接在第二螺杆1102上,且所述l形杆1103的一端与其中一个连接杆703滑动连接,所述l形杆1103的另一端与移动块1104固定,所述移动块1104的上表面固定有第一反射板17,所述支撑杆702上固定有第一红外测距传感器14,通过第三马达1101带动第二螺杆1102转动,使l形杆1103在第二螺杆1102上向上或向下移动,l形杆1103在移动的同时带动移动块1104移动,通过第一红外测距传感器14与第一反射板17的配合,便于测量移动块1104位移的距离,从而测量裂缝一侧沉降深度。
42.所述l形杆1103的一端一体成型有凸起1106,其中一个所述连接杆703的一侧开设有供凸起1106滑动的第三滑槽1105,使l形杆1103可以在第二螺杆1102上向上或向下直线移动;当l形杆1103的横置部与支撑杆702的下表面贴合时,移动块1104的下表面与定位板8的下表面平齐,移动块1104的上表面与定位板8的上表面平齐,在测量裂缝沉降距离时,移动块1104向下位移距离即为沉降深度。
43.所述主控屏3分别与第一马达704、第二马达9012、第三马达1101、电动推杆502、第一红外测距传感器14和第二红外测距传感器18电性连接,所述定位板8和移动块1104的下表面以及检测块9031的斜面均嵌装有触碰传感器,多个所述触碰传感器均与主控屏3电性连接,便于主控屏3根据触碰传感器的感应数据来分别控制第一马达704、第二马达9012、第三马达1101以及电动推杆502的启动与停止。
44.使用时,通过把手2推动该装置移动,使底板10上的万向轮均位于缝隙的一侧,通过电动推杆502带动竖管601向下移动,使竖管601带动检测头602插入缝隙的内部,当检测头602的相对两侧的外壁与缝隙两侧贴合时停止,主控屏3控制第一马达704启动,第一马达704带动第一螺杆701转动,第一螺杆701带动支撑杆702向下移动,使支撑杆702带动定位板8向下移动,当定位板8的下表面与缝隙的一侧贴合时,位于定位板8上的触碰传感器发出测量两个检测块9031之间距离的控制信号,便于测量缝隙的缝宽,同时控制第三马达1101启动,通过第三马达1101带动第二螺杆1102转动,使第二螺杆1102带动l形杆1103向下移动,当移动块1104与缝隙另一侧表面贴合时,位于移动块1104上的触碰传感器发出测量移动块1104位移距离的信号,便于测量缝隙沉降深度,通过对裂缝缝宽和沉降深度测量,为后续分析提供了多种数据,有利于对后续分析数据的完善;且底板10的下表面安装有万向轮,便于在对裂缝不同位置缝宽测量时进行移动,提高裂缝不同位置测量时的便捷性。
45.尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。