技术特征:
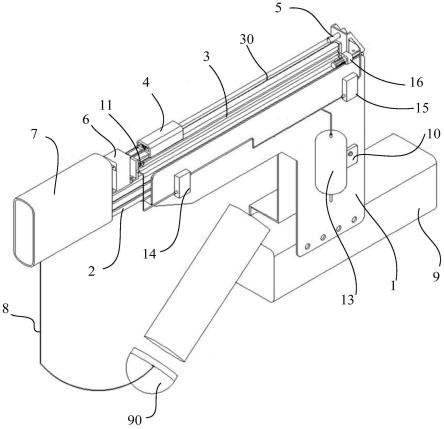
1.一种头型自动捕捉装置,用于行人保护头型试验中,其特征在于,包括固定支架(1)、捕捉模块、气压模块和控制模块(10),其中:所述固定支架(1)固定于头型发射系统(9)上;所述捕捉模块至少包括有与固定支架(1)连接固定的横杆(2);所述横杆(2)上设置有一无杆气缸(3),所述无杆气缸(3)上设置有一受其内部活塞控制的滑块(4);所述横杆(2)的前端固定设置有保护模块(7);所述滑块(4)以及保护模块(7)上均设置有一滑轮且滑轮高度一致;绳缆(8)的一端固定,另一端穿过滑块(4)上的滑轮的下侧并绕至其上侧,从保护模块(7)上的滑轮伸出,与头型发射系统(9)上的头型(90)相连接;所述气压模块固定于所述固定支架(1)上,与所述无杆气缸(3)相连通,用于根据控制模块(10)的控制信号控制无杆气缸(3)运动,以带动控制滑块(4)滑动;所述控制模块(10)固定于所述固定支架(1)上,并与所述气压模块和头型发射系统(9)相连接,用于在接收头型发射系统(9)反馈的信号后,控制气压模块使所述滑块(4)沿远离保护模块(7)的方向移动,实现对所述头型(90)的自动捕捉回收。2.如权利要求1所述的头型自动捕捉装置,其特征在于,所述捕捉模块进一步包括:设置在所述横杆(2)后末端的缓冲限位器(5),其高度与所述滑块(4)的中心平齐;安装在无杆气缸(3)的侧面的限位传感器(11),用于测量无杆气缸(3)内活塞的行程;固定设置在所述横杆(2)的前端的固定导向座(6),其设置于所述保护模块(7)和滑块(4)之间,其上设置有一滑轮,所述滑轮与所述滑块(4)以及保护模块(7)上所设置的滑轮高度一致;所述固定导向座(6)与所述绳缆(8)的一端相固定。3.如权利要求2所述的头型自动捕捉装置,其特征在于,其中:所述无杆气缸(3)上设置有一导轨(30),所述滑块(4)容设在所述导轨中,所述无杆气缸(3)内部的活塞通过磁力控制所述滑块(4)沿着导轨(30)滑动。4.如权利要求要3所述的头型自动捕捉装置,其特征在于,其中:所述固定支架(1)为钢板折焊结构,其中间设置有多个横向圆管,两侧通过螺栓固定于头型发射系统上;所述保护模块(7)为钢板折焊而成的圆柱结构,固定在横杆(2)上,其内壁上安装有所述滑轮,其外侧包裹有海绵。5.如权利要求1至4任一项所述的头型自动捕捉装置,其特征在于,所述气压模块进一步包括:固定设置于固定支架上的第二气缸(13)、第一气阀(14)和第二气阀(15);所述第一气阀(14)通过第一气管(170)连接在无杆气缸(3)前端,所述无杆气缸(3)后端依次连接有一泄气阀(16)、第二气管(171)和第二气阀(15);所述第一气阀(14)与第二气阀(15)之间通过第三气管(172)连通;所述第二气缸(13)的输入端连接有压缩气体源压缩空气源,其输出端与所述第三气管(172)相连通;其中,当第一气阀(14)和第二气阀(15)处于关闭状态时,所述第一气管(170)与第一气阀(14)下端的排气孔连通,所述第二气管(171)与第二气阀(15)下端的排气孔连通;当第一气阀(14)和第二气阀(15)处于开启状态时,所述第一气管(170)和第二气管(171)均与第三气管(172)相连通。6.一种头型自动捕捉方法,采用如权利要求1至5任一项所述的头型自动捕捉装置所实
现,所述方法包括如下步骤:步骤s1,将固定支架(1)固定于头型发射系统(9)上,将第二气缸(13)的下端连接压缩空气源,通过控制模块(10)控制气压模块中第二气阀(15)和泄气阀(16)的状态,使捕捉模块处于初始工作状态;将绳缆(8)与头型发射系统(9)上的头型(90)相连接;步骤s2,在启动头型发射系统(9)使头型(90)撞击汽车前部之后,获得头型(90)与汽车碰撞的第一接触时刻,在所述第一接触时刻起第一时间后,控制模块(10)通过控制第一气阀(14)和泄气阀(16)的状态,使滑块(4)往后滑动以带动绳缆(8)收缩,使头型(90)往车辆的后上方运动;步骤s3,当滑块(4)往后运动到与缓冲限位器(5)接触时,控制模块(10)通过改变第一气阀(14)和泄气阀(16)状态,使滑块(4)停止滑动,以完成对头型(90)的捕捉和保护。7.如权利要求6所述的方法,其特征在于,所述步骤s1进一步包括:控制模块(10)控制气压模块开启所述第二气阀(15)和泄气阀(16),使第二气缸(13)内的压缩空气通过第二气管(171)经泄气阀(16)后部分直接通过泄气阀(16)排出,部分压缩空气进入无杆气缸(3)内推动活塞带动滑块(4)缓慢移动至前端初始的限位位置,且无杆气缸(3)前端缸内的压缩空气通过第一气阀(14)的下端排气孔排出;限位传感器(11)反馈位置信号给控制模块(10),确认捕捉装置处于初始工作状态;关闭所述第二气阀(15)和泄气阀(16)。8.如权利要求6所述的方法,其特征在于,所述步骤s2进一步包括:在所述碰撞第一接触时刻起第一时间后,控制模块(10)通过控制气压模块开启所述第一气阀(14)和泄气阀(16),使第二气缸(13)内的压缩空气通过第一气管(170)进入无杆气缸(3)内推动活塞带动滑块(4)往后移动,无杆气缸(3)后端缸内的压缩空气通过泄气阀(16)排出;滑块(4)往后移动带动绳缆(8)收缩,使头型(90)往车辆的后上方运动。9.如权利要求8所述的方法,其特征在于,所述步骤s3进一步包括:当滑块(4)往后运动到与缓冲限位器(5)接触后,控制模块(10)通过控制气压模块关闭所述第一气阀(14),使无杆气缸(3)内的压缩空气通过第一气管(170)进入第一气阀(14)并通过下端的排气孔排出,使滑块(4)开始减速;在滑块(4)停止后,控制模块(10)通过控制气压模块关闭所述泄气阀(16),绳缆(8)停止收缩,绳缆(8)所连接的头型(90)位于保护模块(7)下方。10.如权利要求9所述的方法,其特征在于,在所述步骤s3之后进一步包括:步骤s4,在滑块(4)停止达到第二时间后,控制模块(10)通过控制气压模块开启第二气阀(15)和泄气阀(16),使第二气缸(13)内的压缩空气通过第二气管(171)经泄气阀(16)后部分直接通过泄气阀(16)排出,部分压缩空气进入无杆气缸(3)内推动活塞带动滑块(4)缓慢往前移动,滑块(4)往前移动带动绳缆(8)伸长,使得头型(90)缓慢下降;当滑块(4)移动至前端初始限位位置时,关闭第二气阀(15),使无杆气缸(3)内的压缩空气通过泄气阀(16)排出。
技术总结
本发明公开了一种头型自动捕捉装置及方法,所述头型自动捕捉装置主要包括固定支架、捕捉模块、头型、气压模块和控制模块。试验前,将头型安装于发射系统中,捕捉模块的绳缆一端与头型连接,另一端依次通过滑轮穿过保护模块、固定导向座和滑块,最后固定在固定导向座上。试验时,发射系统将头型发射并与汽车前部发生碰撞,通过控制模块控制气压模块中的气阀的开闭,在碰撞第一接触时刻之后控制捕捉模块启动,滑块后移拉动绳缆,自动将头型捕捉并保护;本发明结构简单,操作方便,精度高,性能稳定可靠,能够准确有效地捕捉保护行人保护头型,且不影响头型碰撞过程的完整性,从而保障试验结果的有效性和准确性,并提升试验效率。并提升试验效率。并提升试验效率。
技术研发人员:王飞虎 乔曦 龙瑶 欧阳俊 黄宏滔 李诗重
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:2021.06.10
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。