1.本发明属于重力测量领域,具体设计一种冷原子拉曼反射镜安装误差角矫正方法。
背景技术:
2.重力加速度值在地质学中有着很重要的意义,它反映了地球的内部构造,会随着时间和位置发生变化。全球范围内的重力测量可以在大地水准面复原,资源勘探与监测和惯性导航辅助等方面发挥重要作用。冷原子重力仪通常采用三束拉曼光控制冷原子团以实现物质波干涉,进而解算出当地重力加速度值。相对于传统零长弹簧重力仪,冷原子重力仪具有无机械磨损,灵敏度高和测量频率高的优势。但是冷原子重力仪每一次移动都需要对拉曼反射镜进行水平校准,这种操作方式步骤繁琐,不利于冷原子重力仪在野外测量过程中的快速部署。
3.为了解决上述问题,本发明提出一种可以实时测量拉曼反射镜安装误差角的标定方法,通过测量拉曼反射镜与冷原子干涉腔之间的安装推算出冷原子重力仪拉曼反射镜的安装误差角,安装误差角通过加权积分后补偿到冷原子重力仪的测量值中,实现了在工作过程中冷原子重力仪的感应轴能与重力加速度方向保持重合,保证了冷原子重力仪的输出精度。
技术实现要素:
4.本发明旨在解决传统校准技术的缺点,提供一种简洁快速的冷原子重力仪拉曼反射镜安装误差角标定方法,可以实现冷原子重力仪安装误差角的实时补偿,保证冷原子重力仪的输出精度,提高仪器的可靠性。
5.本发明的上述目的通过如下技术方案来实现:
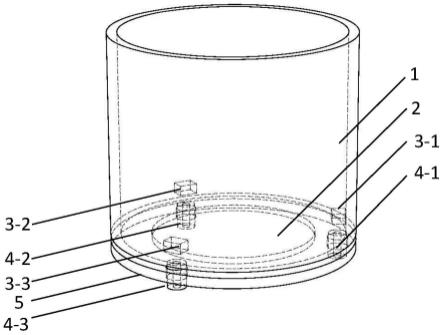
6.一种冷原子重力仪拉曼反射镜安装误差角标定方法,包含冷原子干涉腔(1),拉曼反射镜(2),第一fabry
–
p
é
rot(后简称fp)干涉探头(3-1),第一fp干涉反射镜(4-1),第二fp干涉探头(3-2),第二fp干涉反射镜(4-2),第三fp干涉探头(3-3),第三fp干涉反射镜(4-3),拉曼反射镜调节底座(5),1550nm激光器(6),光纤环形器(7),光电探测器(8),1550nm单模光纤(9)。其特征在于
7.所述的fp干涉探头3中孔内径为125μm;
8.所述的fp干涉探头3位于fp干涉反射镜4下方;
9.所述的fp干涉探头3-1、3-2、3-3三者在拉曼反射镜外围构成等腰三角形,两两间距为a;
10.所述的1550nm单模光纤9去除涂覆层后用光纤切割刀切平,然后穿过fp干涉探头3中孔,1550nm单模光纤9前端面与fp干涉探头3顶部平齐,1550nm单模光纤9后端面连接环形器的端口2;
11.所述的fp干涉反射镜4对1550nm激光反射率大于99%;
12.所述的1550nm激光器6连接环形器的端口1,用于探测激光的发送;
13.所述的光电探测器8连接环形器的端口3,用于fp干涉信号的接收。
14.发明的有益效果在于:本发明实现了冷原子重力仪的拉曼反射镜误差监测功能,基于fp干涉结构可以同时对拉曼反射镜的位移和倾角进行测量,实现了冷原子重力仪在野外工作时的快速标定,提升了冷原子重力仪的测量效率。
附图说明
15.图1为本发明结构示意图;
16.图2为传感探头检测示意图;
17.图3为传感探头安装示意图
具体实施方式:
18.下面对发明进行进一步说明,
19.步骤1:光电探测器8接收到的干涉信号输出为其中e1为1550nm单模光纤9端面的反射信号,e2为fp干涉反射镜的反射信号,λ=1550nm,z为1550nm单模光纤9端面与fp干涉反射镜3的距离,通过光电探测器8的信号e2变化可以推算出1550nm单模光纤9端面与fp干涉反射镜3的距离变化;
20.步骤2:取fp干涉探头3-1作为原点,则三者的基准坐标分别为(0,0,0),(a,0,0),(acos60
°
,asin60
°
,0),基准平面法向量为n0=[0,0,asin60
°
];
[0021]
步骤3:冷原子重力仪经过搬运或者动态测试过后,冷原子重力仪中的拉曼反射镜的位置发生变化,此时干涉探头3-1的坐标变换为(x1,y1,z1),干涉探头3-2的坐标变换为(x2,y2,z2),干涉探头3-3的坐标变换为(x3,y3,z3),其中z1,z2,z3分别由步骤1获得,x1,y1,x2,y2通过下述方程求解获得:
[0022][0023]
步骤4:通过步骤1和步骤3获得的三个干涉探头坐标(x1,y1,z1),(x2,y2,z2)和(x3,y3,z3),并实时计算动态平面法向量为其中
[0024][0025]
步骤5,通过步骤2得到的基准平面法向量为n0=[0,0,asin60]和步骤四动态平面法向量为计算动态平面与基准平面的垂线偏差角
[0026][0027]
步骤6:根据步骤5得到的垂线偏差角θ计算冷原子重力仪的输出相位δφ:
[0028]
δφ=k
eff
gt2(1-θ2)
[0029]
进而得到由于拉曼反射镜安装偏差导致的冷原子重力仪测量偏差值δg
[0030]
δg=-θ2g
[0031]
在实际测量过程中需要将重力测量偏差值补偿到冷原子重力仪输出中去。
技术特征:
1.一种冷原子重力仪拉曼反射镜安装误差角标定装置,包含冷原子干涉腔(1),拉曼反射镜(2),第一fabry
–
p
é
rot(后简称fp)干涉探头(3-1),第一fp干涉反射镜(4-1),第二fp干涉探头(3-2),第二fp干涉反射镜(4-2),第三fp干涉探头(3-3),第三fp干涉反射镜(4-3),拉曼反射镜调节底座(5),1550nm激光器(6),光纤环形器(7),光电探测器(8),1550nm单模光纤(9);2.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,fp干涉探头(3)中孔内径为125μm,并位于fp干涉反射镜(4)下方;3.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,fp干涉探头(3-1)、(3-2)、(3-3)三者在拉曼反射镜外围构成等腰三角形,两两间距为a;4.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,1550nm单模光纤(9)去除涂覆层后用光纤切割刀切平,然后穿过fp干涉探头(3)中孔,1550nm单模光纤(9)前端面与fp干涉探头(3)顶部平齐,1550nm单模光纤(9)后端面连接环形器的端口(2);5.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,fp干涉反射镜(4)对1550nm激光反射率大于99%;6.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,1550nm激光器(6)连接环形器的端口1,用于探测激光的发送;7.根据权利要求1所述的一种冷原子重力仪拉曼反射镜安装误差角标定装置,光电探测器(8)连接环形器的端口3,用于fp干涉信号的接收;8.一种冷原子重力仪拉曼反射镜安装误差角标定方法,具体步骤步骤1:光电探测器8接收到的干涉信号输出为其中e1为1550nm单模光纤9端面的反射信号,e2为fp干涉反射镜的反射信号,λ=1550nm,z为1550nm单模光纤9端面与fp干涉反射镜3的距离,通过光电探测器8的信号e2变化可以推算出1550nm单模光纤9端面与fp干涉反射镜3的距离变化;步骤2:取fp干涉探头3-1作为原点,则三者的基准坐标分别为(0,0,0),(a,0,0),(acos60
°
,asin60
°
,0),基准平面法向量为n0=[0,0,asin60
°
];步骤3:冷原子重力仪经过搬运或者动态测试过后,冷原子重力仪中的拉曼反射镜的位置发生变化,此时干涉探头3-1的坐标变换为(x1,y1,z1),干涉探头3-2的坐标变换为(x2,y2,z2),干涉探头3-3的坐标变换为(x3,y3,z3),其中z1,z2,z3分别由步骤1获得,x1,y1,x2,y2通过下述方程求解获得:步骤4:通过步骤1和步骤3获得的三个干涉探头坐标(x1,y1,z1),(x2,y2,z2)和(x3,y3,z3),并实时计算动态平面法向量为其中
步骤5,通过步骤2得到的基准平面法向量为n0=[0,0,asin60
°
]和步骤四动态平面法向量为计算动态平面与基准平面的垂线偏差角步骤6:根据步骤5得到的垂线偏差角θ计算冷原子重力仪的输出相位δφ:δφ=k
eff
gt2(1-θ2)进而得到由于拉曼反射镜安装偏差导致的冷原子重力仪测量偏差值δgδg=-θ2g在实际测量过程中需要将重力测量偏差值补偿到冷原子重力仪输出中去。
技术总结
本发明涉及一种冷原子重力仪安装误差角标定方法,该方法涉及到重力测量领域,旨在解决传统冷原子重力仪中拉曼反射镜调平步骤复杂以及调节时间长的问题。方法通过在拉曼反射镜背部的三颗调节螺丝中间安装光纤,光纤端面与拉曼反射镜背部形成FP干涉腔,通过三个干涉条纹组合解算出拉曼反射镜的倾角,然后将倾角通过加权积分后补偿到冷原子重力仪的输出中。该发明避免了冷原子重力仪在变换工作环境后的复杂调试过程,只需要在实验室进行一次标定,后续就可以直接补偿反射镜的倾角,有利于冷原子重力仪野外作业的快速部署,提高了冷原子重力仪野外作业的可靠性。子重力仪野外作业的可靠性。子重力仪野外作业的可靠性。
技术研发人员:张亚 范世伟 刘超 高伟 于飞
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.07.08
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。