1.本发明涉及车辆照明系统的领域,并且更具体地涉及管理用于控制车辆的光源的图像数据。
背景技术:
2.现代的照明系统特别地包括现在可以投射高清晰光束的光源。可以通过光源和从图像或图像图案获得高清晰光的期望投射,(光)源接收所述图像或图像图案以便显示该图像或图像图案并由此投射给定的光束。这些图像或图像图案现在能够实现非常高的分辨率,特别地根据所使用的光源的分辨率而能够实现非常高的分辨率。举例来说,光源可以具有至少4000个到30000个像素,因此可以从具有这种分辨率水平的图像生成光束。
3.为了成功产生这样的高清晰光束,可以使用或者甚至组合多个光源,这需要控制该多个光源并且精细地同步这些光源,以提供良好控制的、变化的和自适应的照明功能。
4.因此,车辆携载越来越多数量的光源,其使用越来越繁多的高清晰图像数据,这涉及必须由车辆控制单元管理的并且通过该控制单元与一个或多个光源之间的传输装置进行通信的大量数据。为此,例如,通常使用can协议数据总线以在控制单元和光源之间传送此数据。然而,这些数据传输装置具有带宽受限的缺点,通常不允许超过例如2mbps到5mbps的比特率。结果,在这些受限的网络上传输所述高清晰图像所需的大量数据时出现困难。此外,这些网络还被用于其他车辆数据的通信,这意味着可用于高清晰图像数据的带宽可能甚至更低,例如可能在整个数据传输网络上被限制在最大比特率的70%到90%的范围内。
5.例如,为了传递用于投射具有20000像素分辨率的照明功能的高清晰图像数据,can-fd传输网络所需的比特率通常为10mbps到12mbps。但是,这样的can-fd网络目前实际上被限制在5mbps(或甚至在大多数情况下是2mbps)。因此,需要优化在这些网络上传输的数据,并且特别地需要压缩被传递的数据,以便传输足以确保一个或多个相关联的照明功能的高清晰图像数据流,同时遵守该同一网络的比特率和带宽约束。
6.已经设想已知的压缩方法来克服该问题,但是这些已知的压缩方法都被证明对于远光束特异性是不充分的,从而妨碍了机动车辆制造商所要求的带宽的充分减小。
7.为了实现这一点,可以规定,执行数据压缩的多个等级或迭代,直到成功满足期望的带宽为止。尽管如此,这种方法对所投射的照明功能的显示质量具有非常显著的影响,这是因为在每次执行压缩的情况下都会影响显示质量;降低了显示质量。
8.但是,对于某些照明功能,例如自适应驱动光束(adb)和道路书写(rw)显示质量不能过度劣化,这是因为否则使用者体验将显著降低,其中由光束投射的光信息变得不清楚、不充分或甚至难以辨认。
9.因此,需要一种技术方案以便克服前述缺陷。
技术实现要素:
10.本发明通过一种用于管理机动车辆照明系统的图像数据的方法来提供对上述技
术问题的至少部分解决方案,所述照明系统包括用于投射光束的至少一个照明模块,所述光束由与选择的至少一个原始图像相关的数据生成,每个原始图像分别由包括像素的多个水平和/或竖直的行的矩阵限定,其中每个像素由与所述像素的光强度相关的数值v[i]表征,所述方法包括以下步骤:
[0011]-接收指令以激活待被投射的至少一个原始图像;
[0012]-将原始图像转换成n个灰度级,其中每个灰度级对应于范围相应地从第一个灰度级阈值到最后一个灰度级阈值的阈值;
[0013]-从所述矩阵的第一行到最后一行,从被分析的行的第一个像素到最后一个像素依次执行以下步骤:
[0014]-如果被分析的像素的强度数值v[i]接近或等于范围相应地从第一个阈值到最后一个阈值的阈值中的至少一个阈值,则所述被分析的像素被认为是与所述被分析的行相关的曲线的明显拐点并且被保存为待被传输的列表中的压缩像素,否则所述被分析的像素不保存在该列表中;
[0015]-重复前一步骤一直到所述矩阵的最后一行的最后一个像素为止;
[0016]
并且其中,将所述矩阵的压缩像素的所述列表传输到至少一个照明模块,使得所述至少一个照明模块能够投射结果的图像。
[0017]
有利地,在一个实施例中,当压缩像素的数值v[i]和相邻压缩像素的数值v[i 1]分别接近同一个灰度级阈值时,则在该组压缩像素之间寻找像素,所寻找到的像素包括最大数值v[imax]或最小数值v[imin],以便用作像素曲线的明显拐点,将所述寻找到的像素保存在压缩像素的所述列表中。
[0018]
有利地,在另一实施例中,当所述相邻像素的数值v[i 1]相对于所述被分析的像素的数值v[i]大于至少两个相继的灰度级阈值时,则将这些像素保存在压缩像素的所述列表中。
[0019]
有利地,在另一实施例中,当所述被分析的像素的数值v[i]和所述相邻像素的值v[i 1]相继等于0时,则递增i的值,并且然后重复该步骤,直到所述相邻像素的数值v[i 1]不为0为止,然后将具有等于0的值v[i]的第一个像素和最后一个像素保存在压缩像素的所述列表中。
[0020]
有利地,在另一实施例中,从压缩像素的所述列表的第一个压缩像素到最后一个压缩像素:
[0021]-根据所述压缩像素的数值v[i]和所述相邻压缩像素的数值v[i 1]来计算梯度值;
[0022]-确定所述被分析的压缩像素是否是与压缩像素的所述列表相关的曲线的明显拐点;
[0023]-当所述被分析的压缩像素被认为是所述曲线的明显拐点时,则将所述被分析的压缩像素保留在待被传输的压缩像素的所述列表中,否则从所述列表中移除所述压缩像素。
[0024]
有利地,在另一实施例中,在任一压缩步骤之前待使用的与所述原始图像相对应的所述矩阵由所有的行d中在给定的递归t之后选择y个行来获得,其中t对应于小于d的整数,并且y=d/t。
[0025]
有利地,在另一实施例中:
[0026]-t=2,或
[0027]-t=3,或
[0028]-t=4。
[0029]
根据一个实施例,从以下组选择所述原始图像(i[x]):
[0030]-光度测量,诸如lb、或hb、或off、或lb和dbl、或hb和dbl;
[0031]-照明功能,诸如adb、和/或tsag、和/或rw、和/或la、和/或la_center。
[0032]
根据一个实施例,通过以下方式来执行对在所述照明模块处所接收到的压缩像素的所述列表进行解压的步骤:
[0033]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间进行线性插值;或
[0034]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间进行多项式插值;或
[0035]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用贝塞尔曲线方法进行插值;或
[0036]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用参数自适应方法进行插值;或
[0037]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用最小二乘方法进行插值;或
[0038]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用指数建模方法进行插值;或
[0039]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用傅里叶级数方法进行插值;或
[0040]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用高斯建模方法进行插值;或
[0041]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用幂级数方法进行插值;或
[0042]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用正弦模型之和的方法进行插值;或
[0043]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用威布尔分布方法进行插值;或
[0044]-通过在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用个性化模型方法进行插值。
[0045]
在另一实施例中,所述压缩像素仅与所述原始图像的特定部分相关。
[0046]
根据本发明的第二方面,本发明涉及一种机动车辆照明系统,其包括:
[0047]-至少一个照明模块,所述至少一个照明模块包括能够从压缩数据投射至少一个光度测量和/或照明功能的多个光源;
[0048]-多路复用总线,所述多路复用总线用于将压缩数据传输到至少一个照明模块;
[0049]-控制单元,所述控制单元被配置为实施根据前述特征中任一特征所述的方法的
步骤中的所有步骤。
[0050]
在一个实施例中,所述照明模块还包括被配置为能够对压缩像素的所述列表进行解压的控制单元。
[0051]
在另一实施例中,每个照明模块的控制单元包括存储至少一个欢迎和/或一个再见场景的存储器。
[0052]
根据另一有利实施例,至少一个照明模块包括至少一个半导体光源,例如led,并且特别是像素化led源。
[0053]
与白炽照明相比,半导体照明产生具有更少热量产生和更少能量消耗的可见光。与易碎的玻璃管/灯泡和细长的灯丝相比,半导体电子照明装置的通常较轻的重量提供对冲击和振动更强的抵抗力。半导体电子照明装置也不受灯丝蒸发的影响,这可以提高照明装置的使用寿命。这些类型的照明的一些示例包括半导体发光二极管(led)、有机发光二极管(oled)或聚合物发光二极管(pled)作为光源,而不是电灯丝、等离子体或气体。
[0054]
除非另有定义,否则在本文档中使用的所有术语(包括技术和科学术语)均应按照行业的标准惯例进行解释。还应理解,应当按照相关领域中的管理而不是理想化或过于形式的意义来解释常用术语,除非在本文中被明确定义。
附图说明
[0055]
为了补充描述并且允许更好地理解本发明,提供了一组附图。这些附图构成了说明书的组成部分并且图示了本发明的一个实施例,其不应被解释为限制本发明的范围,而仅仅是作为可以如何实施本发明的示例。附图如下:
[0056]
[图1]图示了根据本发明的一个实施例的与远光束的光度测量相关的图像的示意图;
[0057]
[图2]图示了根据本发明的一个实施例的根据[图1]的光度测量的像素的部分矩阵;
[0058]
[图3]图示了根据本发明的一个实施例的根据[图1]的光度测量的n个灰度级的量化;
[0059]
[图4a]、[图4b]和[图4c]分别图示了根据本发明的一个实施例的代表对其执行相继的压缩步骤的矩阵m[x]的行r[k]作为n个灰度级的函数的曲线;
[0060]
[图5]图示了根据本发明的机动车辆照明系统。
具体实施方式
[0061]
在说明书的其余部分中使用了一组缩写、附图标记和/或编号,它们的定义已经在下面列出以便更好地理解附图,但是某些附图标记未被图示出以使附图更清晰,但是这些附图标记对于本领域技术人员而言是已知的:
[0062]
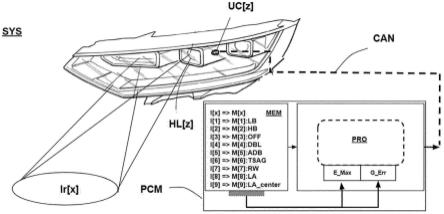
sys:机动车辆照明系统,包括至少一个照明模块hl[z]、多路复用总线can和控制单元pcm;
[0063]
hl[z]:照明模块,用于投射相同分辨率的光束的必要部件,z对应于模块的编号;
[0064]
i[x]:与一组lb、hb、off、dbl、adb、tsag、rw、la、la_center类型的非穷举的光度测量(photometry)和/或照明功能相关的原始图像。
[0065]
m[x]:对应于图像i[x]的矩阵等同物。
[0066]
lb:(low beam)代表近光束的光度测量;
[0067]
hb:(high beam)代表远光束的光度测量;
[0068]
off:其中图像i[x]的所有的像素p[i]的数值v[i]为0或关闭的光度测量;
[0069]
dbl:(dynamic bending light,动态弯曲光)光度测量,其允许动态定向照明,换句话说,lb或hb光度测量的最大强度的水平位移,其取决于机动车辆的方向盘的转动角度;
[0070]
adb:(adaptive driving beam,自适应驱动光束)允许使用远光束光度测量进行照明,同时避免使其他道路使用者眩目的功能;
[0071]
tsag:(traffic sign anti-glare,交通标志防眩光)可以避免使道路上的在来自机动车辆的光束的投影的后面的交通标志眩目的照明功能;
[0072]
rw:(road writing,道路书写)允许将对于驾驶员和/或道路使用者可见的图案投射到道路上的照明功能;
[0073]
la:(line assist,线辅助)允许将线类型的图案投射到道路上,特别地用于界定将由机动车辆要采用的一部分道路或呈现障碍物避开策略的照明功能;
[0074]
la_center:是la的变型,除了它被投射在道路的中央之外,特别地用于指示车辆的方向。
[0075]
p[i]:图像的像素,其中i是范围从初始值1到最终值f的变量;
[0076]
v[i]:像素p[i]的数值,其中i是范围从初始值1到最终值f的变量;
[0077]
g[i]:p[i]的梯度值
[0078]
r[k]:图像i[x]或i[y]的第k行,其中k是从初始值1到最后值d的变量;
[0079]
c_r[k]:与第k行r[k]相关的曲线;
[0080]
pis[i]:曲线的明显拐点,曲线的凹度发生变化的点,pis[i]被认为是待压缩的像素,其中i是范围从初始值1到最终值f的变量;
[0081]
c_pis[i]:与列表lpis[i]的所有压缩像素pis[i]相关的曲线;
[0082]
lpis[i]:压缩像素pis[i]的列表;
[0083]
pcm:(pixel controller module,像素控制器模块),用于通过控制单元uc[z]驱动照明模块的一组像素的控制单元;
[0084]
can或can-fd:多路复用通信总线的变型;
[0085]
uc[z]:控制单元,也被称为驱动器,用于控制照明模块。每个控制单元uc[z]相对于被认为是“主”的控制单元pcm作为“从属”进行交互。
[0086]
充分详细地描述示例性实施例以允许本领域的普通技术人员能够实施下文描述的系统和过程。重要的是要理解,实施例可以以多种替代形式提供并且不应被解释为限于以下呈现的示例。
[0087]
相应地,虽然实施例可以以各种不同的方式修改并且采取各种不同的替代形式,但是其具体实施例在附图中示出并且在下文通过示例的方式进行详细描述。无意于限制所公开的特定形式。相反,将包括落入所附权利要求的范围内的所有修改、等同物和替代物。
[0088]
[图1]图示了图像i[x]的示意图,该图像i[x]被称为原始图像,与hb(远光束)光度测量相关。
[0089]
根据本发明,每个图像i[x]具有该图像的呈矩阵m[x]形式的等同物,该矩阵m[x]
包括像素p[i]的多个水平或竖直的行r[k],每个像素p[i]由与光强度相关的数值v[i]表征。在本发明的一个实施例中,数值v[i]在从与黑色对应的0到与白色对应的255的范围内延伸。[图2]图示了与根据[图1]的具有与远光束hb对应的光度测量的像素p[i]的部分矩阵m[x]相关的一个实施例。
[0090]
如今,现代的机动车辆具有控制单元,通常被称为pcm(像素控制器模块),用于通过控制单元uc[z]驱动照明模块hl[z]的一组像素,其中范围从1到n的变量z对应于被分配给该照明模块hl[z]的编号。控制单元pcm和每个控制单元uc[z]分别并且以非穷举的方式包括至少一个微处理器pro和存储器mem,其被配置为允许实施用于管理根据本发明的机动车辆照明系统sys的图像数据的方法。
[0091]
控制单元pcm被配置成使得,取决于从分布在机动车辆中的一组传感器所收集的数据和所述车辆正在其中移动的环境背景,所述控制单元pcm能够在完全自主的情况下、或在驾驶员的冲动下、或根据所述驾驶员在道路上的行为,来决定是激活或停用至少一种调节lb、hb、off、dbl光度测量和/或adb、tsag、rw、la、la_center照明功能。在本发明的上下文中,光度测量和照明功能的两个概念是不同的。实际上,在非穷举列表中将考虑到,术语“光度测量”涵盖图像i[x],其中x的范围从1到4,其中:
[0092]-i[1]包括与远光束hb对应的等同物矩阵m[1];
[0093]-i[2]包括与近光束lb对应的等同物矩阵m[2];
[0094]-i[3]包括等同物矩阵m[3],其中所有的像素具有0的数值v[i],换句话说,所有的像素p[i]都是关闭的,其中i的范围从1到f;
[0095]-i[4]包括与动态弯曲光dbl对应的等同物矩阵m[4]。
[0096]
同样地,在非穷举列表中将考虑到,术语“照明功能”涵盖图像i[x],其中x的范围从5到9,其中:
[0097]-i[5]包括与adb(自适应驱动光束)功能对应的等同物矩阵m[5],该adb功能允许使用具有lb、hb或dbl光度测量的照明,同时避免使其他道路使用者炫目;
[0098]-i[6]包括与tsag(交通标志防眩光)功能对应的等同物矩阵m[6],该tsag功能可以避免使道路上的在来自机动车辆的光束的投影的后面的交通标志眩目;
[0099]-i[7]包括与rw(道路书写)功能对应的等同物矩阵m[7],该rw功能允许将对于驾驶员和/或道路使用者可见的图案投射到道路上;
[0100]-i[8]包括与la(线辅助)功能对应的等同物矩阵m[8],该la功能允许在有或没有线滚动感觉的情况下将线类型的图案投射到道路上,以便界定将由机动车辆要采用的一部分道路或投射障碍物避开策略;
[0101]-i[9]包括与la_center功能对应的等同物矩阵m[9],该la_center功能是la功能的变型,除了它被投射在道路的中央之外,特别地用于指示车辆的方向。
[0102]
本发明决不仅仅限于上述光度测量和照明功能,并且不言而喻,可以添加或更新与欢迎(welcome)和/或再见(goodbye)场景相关的图像、和/或特定于世界的地区或国家的规定的其他光度测量和/或照明功能。
[0103]
根据本发明,在控制单元pcm的存储器中记录数据库,该数据库包括在道路上可能的光度测量和照明功能的一组矩阵m[x],其特别地取决于相应的规定。控制单元pcm在接收到来自驾驶员的指令之后或根据其自身关于机动车辆的环境背景的主动性,激活待被投射
的至少一个图像i[x]的投射。然后,从保存在控制单元pcm的存储器中的数据库中选择对应的矩阵m[x]。
[0104]
根据[图3],将所选择的图像i[x]转换成n个灰度级,其中每个灰度级对应于范围相应地从第一个灰度级阈值s[1]到最后一个灰度级阈值s[n]的阈值。根据[图4a],从矩阵m[x]的第一行r[1]到最后一行r[d],控制单元从行r[k]的第一个像素p[1]到最后一个像素p[f]依次执行以下步骤:
[0105]-如果被分析的像素p[i]的强度数值v[i]接近或等于范围相应地从s[1]到s[n]的阈值中的至少一个阈值,则该被分析的像素p[i]被认为是与行r[k]相关的曲线c_r[k]的明显拐点并且被保存为待被传输的列表lpis[i]中的压缩像素pis[i],否则不保存该被分析的像素p[i];
[0106]-控制单元pcm重复前一步骤一直到矩阵m[x]的最后一行r[d]的最后一个像素p[f]为止。
[0107]
在本发明的第一实施例中,矩阵m[x]的压缩像素pis[i]的列表lpis[i]被传输到至少一个照明模块hl[z],使得该照明模块能够投射结果的图像ir[x]。
[0108]
为了改进错误率,在[图4b]图示的一个实施例中,本发明规定,当压缩像素pis[i]的数值v[i]和相邻压缩像素pis[i 1]的数值v[i 1]分别接近同一个阈值s[1]、
……
、s[n]时,则在该组压缩像素pis[i]与pis[i 1]之间寻找像素p[i],所寻找到的像素p[i]包括最大数值v[imax]或最小数值v[imin],以用作曲线c_r[k]的明显拐点。然后,将该寻找到的像素p[i]保存在压缩像素pis[i]的列表lpis[i]中。
[0109]
为了改进压缩率,在根据[图4c]的一个实施例中,当相邻像素p[i 1]的数值v[i 1]相对于被分析的像素p[i]的数值v[i]大于至少两个相继的阈值s[1]、
……
、s[n]时,则将这些像素p[i]、p[i 1]保存在压缩像素pis[i]的列表lpis[i]中。
[0110]
仍然以改进压缩率为目的,在[图4c]图示的一个实施例中,当被分析的像素p[i]的数值v[i]和相邻像素p[i 1]的值v[i 1]相继等于0时,则递增i的值,并且然后重复该步骤,直到该相邻像素p[i 1]的数值v[i 1]不为0为止,然后将具有等于0的值v[i]的第一个像素和最后一个像素p[i]保存在压缩像素pis[i]的列表lpis[i]中。
[0111]
为了进一步改进压缩率,在本发明的一个实施例中,从压缩像素pis[i]的列表lpis[i]的第一个压缩像素pis[1]到最后一个压缩像素pis[f]:
[0112]-控制单元根据压缩像素pis[i]的数值v[i]和相邻压缩像素pis[i 1]的数值v[i 1]来计算梯度值g[i]。这种对梯度g[i]的计算按如下进行:g[i]=v[i 1]-v[i],其中i的范围从1到f;
[0113]-控制单元确定被分析的压缩像素pis[i]是否是与压缩像素pis[i]的列表lpis[i]相关的曲线c_pis[i]的明显拐点。为此目的,控制单元pcm进行:
[0114]-确定与曲线c_pis[i]的被分析的压缩像素pis[i]的值v[i]与该压缩像素pis[i]的v[i]之间的最大容许差相对应的值e_max_v[i]。
[0115]-当被分析的压缩像素pis[i]被认为是曲线c_pis[i]的明显拐点时,则将该被分析的压缩像素pis[i]保留在待被传输到照明模块hl[z]的压缩像素的列表lpis[i]中,否则从列表lpis[i]中移除所述压缩像素pis[i]。
[0116]
为了显著改进压缩率,在本发明的一个实施例中,在任一压缩步骤之前,预备步骤
规定,在第一行r[1]到最后一行r[d]之间,选择在给定的递归t之后矩阵m[x]的y个行r[k]。认为该递归t对应于比行r[k]的总数d小的整数,并且y=d/t。在一个示例中,t=2,或t=3,或t=4。因此,将使用与在递归t之后选择的y个行相对应的矩阵m[y]来代替矩阵m[x]来实施上述各种不同的压缩算法,从而减少待压缩的像素的数量,并且同时减少微处理器pro的计算时间。
[0117]
[图5]示出了根据本发明的机动车辆照明系统sys,该机动车辆照明系统sys包括:
[0118]-至少一个照明模块hl[z],所述至少一个照明模块包括能够从压缩数据lpis[i]投射光度测量和/或照明功能的多个光源(例如led);
[0119]-多路复用can、can-fd总线等,用于将压缩数据lpis[i]传输到至少一个照明模块hl[z];
[0120]-控制单元pcm,用于实施所有上述压缩步骤,以便生成压缩数据pis[i];
[0121]-控制单元uc[z],被配置为对压缩数据进行解压,该控制单元uc[z]位于照明模块hl[z]中。
[0122]
通过以下方式来执行这种对在照明模块hl[z]处通过can接收的压缩像素的列表进行解压的步骤:
[0123]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间进行线性插值;或
[0124]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间进行多项式插值;或
[0125]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用贝塞尔曲线方法(b
é
zier curve method)进行插值;或
[0126]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用参数自适应方法(parametric adaptation method)进行插值;或
[0127]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用最小二乘方法(least squares method)进行插值;或
[0128]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用指数建模方法(exponential modeling method)进行插值;或
[0129]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用傅里叶级数方法(fourier series method)进行插值;或
[0130]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用高斯建模方法(gaussian modeling method)进行插值;或
[0131]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用幂级数方法(power series method)进行插值;或
[0132]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用正弦模型之和的方法(sums of sines models method)进行插值;或
[0133]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用威布尔分布方法(weibull distribution method)进行插值;或
[0134]-在由压缩像素的所述列表形成的所述曲线的所述明显拐点之间的子区间使用个性化模型方法(personalized models method)进行插值。
[0135]
每个照明模块hl[z]使得可以使用允许压缩率接近或大于90%的方法,来获得质量与原始图像i[x]基本上相同的结果的图像ir[x]或远光束的投射。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。