1.本实用新型涉及起吊领域,特别是一种可以用作普通的四点起升机构、也可以根据需要实现四点起升三点平衡的可控四点起升三点平衡机构。
背景技术:
2.通常四个吊点的起升机构,为保证四个吊点间的受力平衡,不出现某个吊点超载的情况,一般只能人工调整各个吊点的钢丝绳长度来满足吊点受力均衡的要求,作业效率低。现有专利如专利公开号为cn102963832a,申请日为2012-11-29,名称为《四点起吊三点平衡防摇摆起升机构的钢丝绳缠绕系统》的发明专利,公开了如下内容:本发明涉及一种四点起吊三点平衡防摇摆起升机构的钢丝绳缠绕系统,其特征是:包括两个同轴布置的双联卷筒、四个设置在双联卷筒下方吊具上的动滑轮及八个布置成两排且平行、对称分布在双联卷筒两侧的转向滑轮,所述双联卷筒上引出4根绳,每根绳均通过其中的一个动滑轮及与该动滑轮同侧设置的两个相邻转向滑轮后固定在吊具上。本发明在两个普通同轴布置的双联卷筒上,下四根绳,通过两排与之平行规矩布置的8个转向滑轮,实现四个正三角叠加8个倒三角型,既完全保证了悬挂系统的刚性,有效的防止吊具摇摆,且结构规整简洁。虽然上述对比文件能够实现一定程度上的平衡,但是无法实现可控的要求,不能根据工作需要进行打开和闭合,无法在普通四吊点起升机构与四点起升三点平衡系统之间方便的切换。
技术实现要素:
3.针对现有技术存在的上述问题,现在提出一种可在普通四吊点起升机构与四点起升三点平衡系统之间方便切换的可控四点起升三点平衡机构。
4.为实现上述技术效果,本实用新型是通过以下技术方案实现的:
5.一种可控四点起升三点平衡机构,包括四套起升机构,每套起升机构均包括一个独立的吊点,四套起升机构中的两套起升机构之间设置有可控平衡装置,所述可控平衡装置包括底座,所述底座上安装有支架,所述支架上设置有转轴,所述转轴上安装有左滑轮和右滑轮,所述左滑轮和右滑轮之间通过开合机构相连接。
6.进一步地,所述转轴上套接有轴套,所述轴套上安装有两个滚动轴承,两个滚动轴承之间设置有轴承隔套,一个滚动轴承上安装有左滑轮,另一个滚动轴承上安装有右滑轮。
7.进一步地,所述滚动轴承的两侧面设置有遮挡盖。
8.进一步地,所述左滑轮上设置有左压绳装置,所述右滑轮上设置有右压绳装置。
9.再进一步地,所述左压绳装置与右压绳装置结构相同,均包括螺栓和钢丝绳压板。用螺栓将钢丝绳压板压住钢丝绳绳头,固定钢丝绳。
10.进一步地,所述开合机构包括至少一组能承受剪切的螺栓副。左、右滑轮穿上螺栓副时,开合机构闭合,左滑轮、右滑轮成为同轴的刚性整体,能够实现这两个吊点自动平衡;卸下螺栓副时,开合机构打开,左、右滑轮相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。
11.进一步地,起升机构包括电动机,所述电动机通过联轴器与减速器相连,所述联轴器上设置有制动盘,所述减速器上设置有高度编码器及限位开关,所述减速器上连接有卷筒,卷筒外设置有定滑轮装置和动滑轮装置。
12.1、本技术提出的可控平衡装置设置有开合机构,可以根据工作需要打开或闭合,开合机构打开时,左、右滑轮相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。开合机构闭合时,左滑轮、右滑轮成为同轴的刚性整体,能够实现这两个吊点自动平衡,进而实现四点起升三点平衡。本技术可以在普通四吊点起升机构与四点起升三点平衡系统之间方便的切换。
13.2、本技术的四点起升三点平衡机构,通过在四个吊点中的两个吊点之间设置可控平衡装置,使这两个吊点自动平衡,与另外两个吊点组成三点平衡,实现四点起升三点平衡,满足吊装中的吊点平衡要求。
附图说明
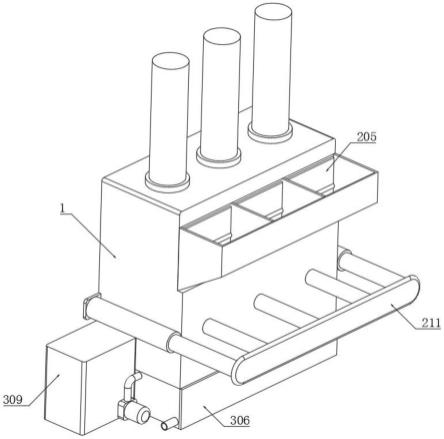
14.图1为本技术整体结构示意图。
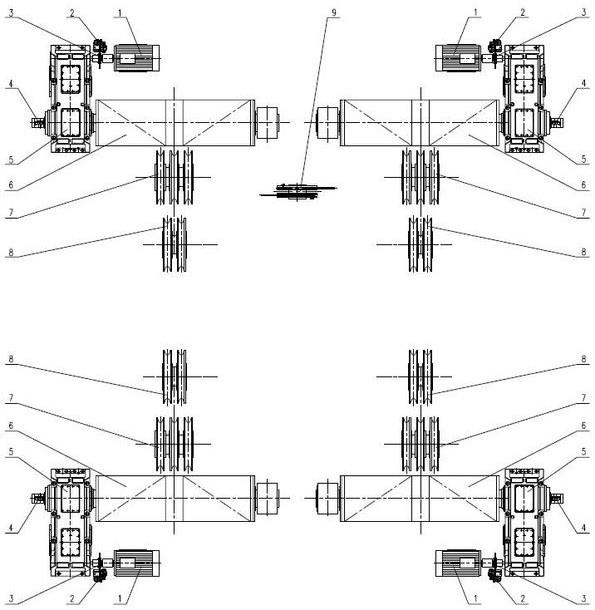
15.图2为相邻两吊点平衡结构示意图。
16.图3-图5为可控平衡装置结构示意图。
17.附图中:
18.1-电动机,2-制动盘,3-联轴器,4-高度编码器及限位开关,5-减速器,6-动滑轮装置,7-卷筒,8-定滑轮装置,9-可控平衡装置,91-底座,92-支架,93-转轴,94-左滑轮,95-右滑轮,96-开合机构,97-轴套,98-滚动轴承,99-轴承隔套,910-左滑轮,911-右滑轮,912-遮挡盖,913-左压绳装置,914-右压绳装置。
具体实施方式
19.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
20.需要指出的是,本发明实施例中所有的方向性指示(诸如两侧、边缘、上、下、左、右、前、后、中、顶端、底端、尾部、轴向、径向......)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动状态等,如该特定姿态发生改变时,则方向性指示也相应随之改变。
21.实施例1
22.一种可控四点起升三点平衡机构,包括四套起升机构,每套起升机构均包括一个独立的吊点,四套起升机构中的两套起升机构之间设置有可控平衡装置9,所述可控平衡装置9包括底座91,所述底座91上安装有支架92,所述支架92上设置有转轴93,所述转轴93上安装有左滑轮94和右滑轮95,所述左滑轮94和右滑轮95之间通过开合机构96相连接。
23.本技术提出的可控平衡装置9设置有开合机构96,可以根据工作需要打开或闭合,开合机构96打开时,左、右滑轮95相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。开合机构96闭合时,左滑轮94、右滑轮95成为同轴的刚性整体,能够实现这两个吊点自动平衡,进而实现四点起升三点平衡。本技术可以在普
通四吊点起升机构与四点起升三点平衡系统之间方便的切换。本技术的四点起升三点平衡机构,通过在四个吊点中的两个吊点之间设置可控平衡装置9,使这两个吊点自动平衡,与另外两个吊点组成三点平衡,实现四点起升三点平衡,满足吊装中的吊点平衡要求。
24.实施例2
25.一种可控四点起升三点平衡机构,包括四套起升机构,每套起升机构均包括一个独立的吊点,四套起升机构中的两套起升机构之间设置有可控平衡装置9,所述可控平衡装置9包括底座91,所述底座91上安装有支架92,所述支架92上设置有转轴93,所述转轴93上安装有左滑轮94和右滑轮95,所述左滑轮94和右滑轮95之间通过开合机构96相连接。
26.转轴93上套接有轴套97,所述轴套97上安装有两个滚动轴承98,两个滚动轴承98之间设置有轴承隔套99,一个滚动轴承98上安装有左滑轮94,另一个滚动轴承98上安装有右滑轮95。
27.滚动轴承98的两侧面设置有遮挡盖912。
28.左滑轮94上设置有左压绳装置913,所述右滑轮95上设置有右压绳装置914。
29.左压绳装置913与右压绳装置914结构相同,均包括螺栓和钢丝绳压板。用螺栓将钢丝绳压板压住钢丝绳绳头,固定钢丝绳。
30.开合机构96包括至少一组能承受剪切的螺栓副。左、右滑轮95穿上螺栓副时,开合机构96闭合,左滑轮94、右滑轮95成为同轴的刚性整体,能够实现这两个吊点自动平衡;卸下螺栓副时,开合机构96打开,左、右滑轮95相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。
31.起升机构包括电动机1,所述电动机1通过联轴器3与减速器5相连,所述联轴器3上设置有制动盘2,所述减速器5上设置有高度编码器及限位开关4,所述减速器5上连接有卷筒7,卷筒7外设置有定滑轮装置8和动滑轮装置6。
32.本技术提出的可控平衡装置9设置有开合机构96,可以根据工作需要打开或闭合,开合机构96打开时,左、右滑轮95相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。开合机构96闭合时,左滑轮94、右滑轮95成为同轴的刚性整体,能够实现这两个吊点自动平衡,进而实现四点起升三点平衡。本技术可以在普通四吊点起升机构与四点起升三点平衡系统之间方便的切换。本技术的四点起升三点平衡机构,通过在四个吊点中的两个吊点之间设置可控平衡装置9,使这两个吊点自动平衡,与另外两个吊点组成三点平衡,实现四点起升三点平衡,满足吊装中的吊点平衡要求。
33.左侧绳进入左滑轮94,并通过专用绳孔引出,在左滑轮94侧面压绳固定,右侧绳进入右滑轮95,并通过专用绳孔引出,在右滑轮95侧面压绳固定。左滑轮94、右滑轮95之间通过开合机构96连接,可以根据工作需要打开或闭合,开合机构96打开时,左、右滑轮95相对各自独立工作,这两个吊点成为两个独立的吊点,整个起升机构可用作普通四吊点起升机构。开合机构96闭合时,左滑轮94、右滑轮95成为同轴的刚性整体,能够实现这两个吊点自动平衡,进而实现四点起升三点平衡。工作时钢丝绳带动滑轮旋转进行调整,钢丝绳在滑轮上多层缠绕,实现长行程调整范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。