1.本实用新型关于一种带双机械手的12芯智慧光纤配线架,属于网络配线装置技术领域。
背景技术:
2.随着通信技术的发展,光纤通信已经成为主流,在光纤传输线路送,一根光缆通常包括多条光纤,光纤配线架实现与另一根光缆或终端用户的多条光纤对应连接光纤配线架中的光纤物理通道在应用中会根据连接需要重新配线,就是重新拔插对接,也经常会存在维护的操作。
3.传统的12芯智慧光纤配线架拔插对接、跳纤的工作由人工完成,即人工先找到光纤配线架的位置,打开光纤配线架,通过光纤上的标签,人工完成光纤的拔插、对接操作,然而,因需要打开光纤配线架的壳体,再人工操作,过程上繁琐。因此,需要一种带双机械手的12芯智慧光纤配线架,不再需要打开配线架,直接去通过机械手完成光纤的拔插操作。
技术实现要素:
4.为解决上述问题,本实用新型的目的是提供一种带双机械手的12芯智慧光纤配线架,通过设置在壳体内的第一机械手和第二机械手完成光纤的拔插操作。
5.本实用新型一种带双机械手的12芯智慧光纤配线架,包括壳体、架体、第一机械手、第二机械手和输入光纤、输出光纤、第一对接头、第二对接头、光纤接头;所述架体设置在壳体内;所述架体包括支架和设置在支架上的第一横向支板、第二横向支板和第三横向支板;第一横向支板、第二横向支板和第三横向支板相互平行,第二横向支板和第三横向支板分别位于第一横向支板的两侧;输入光纤、输出光纤、第一对接头的数量均为12个;所述第二对接头设置在第二机械手上;
6.所述第一机械手设置在第二横向支板上;所述第二机械手设置在第三横向支板上;输入光纤、输出光纤的两端分别设置光纤插头;
7.第一对接头等间距的设置在第一横向支板上,输入光纤一端的光纤插头分别插接在第一对接头的一端;输出光纤一端的光纤插头分别插接在第一对接头的另一端;
8.光纤接头设置在壳体上;输入光纤另一端的光纤插头以及输出光纤另一端的光纤插头分别与光纤接头连接。
9.进一步的,第二对接头的数量为2个。
10.进一步的,所述第一机械手包括夹持件和使夹持件移动的三轴直线模组;三轴直线模组包括x轴直线模组、y轴直线模组和z轴直线模组;所述x轴直线模组设置在第二横向支板上,所述z轴直线模组设置在x轴直线模组的左右移动板,所述y轴直线模组设置在z轴直线模组的上下移动板,所述夹持件设置在y轴直线模组的前后移动板上。
11.进一步的,所述夹持件包括u型夹头和连接板;所述u型夹头通过连接板设置在前后移动板上;输入光纤插接在第一对接头的那一端的光纤插头上套设与u型夹头配合的夹
持壳;夹持壳的两端设置挡板。
12.进一步的,所述第二机械手包括插接件和使插接件左右移动的单轴直线模组;所述单轴直线模组设置在第三横向支板上;插接件位于第一横向支板的上方;所述插接件包括支撑体;支撑体设置在单轴直线模组的左右板上;所述第二对接头设置在支撑体上。
13.进一步的,所述第一对接头上设置标号;所述夹持壳设置标号。
14.进一步的,所述第一横向支板设置若干个凹槽;所述第一对接头设置在凹槽内。
15.进一步的,所述壳体上设置透明观察窗;所述壳体上设置扶手。
16.本实用新型的有益效果:
17.本实用新型壳体内设置第一机械手和第二机械手,第一机械手可以进行前后、左右、上下的移动,其夹持件夹持输入光纤,将输入光纤从第一对接头中拔出,然后通过移动插入另一个第一对接头,完成光纤的插接、调换;第二机械手可进行左右移动,与第一机械手配合左右移动,用来暂时存储拔出的输入光纤,便于进行两根输入光纤的对调。
附图说明
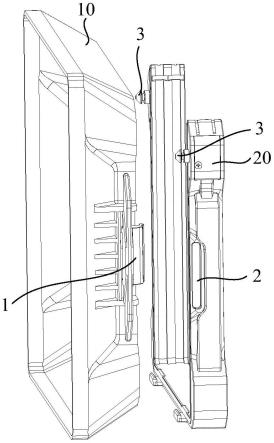
18.图1为本实用新型的立体示意图;
19.图2为本实用新型去除壳体后的俯视图(为了清楚显示,图2中只示出了输入光纤、输出光纤插入到第一对接头的那一端);
20.图3为本实用新型去除壳体后的另一角度的示意图;
21.图4为本实用新型的第一机械手的示意图;
22.图5为本实用新型的u型夹头与夹持壳的示意图。
23.附图标记说明
24.1、壳体,2、支架,3、第一横向支板,4、第二横向支板,5、第三横向支板,6、输入光纤,7、输出光纤,8、第一对接头,9、第二对接头,10、三轴直线模组,100、左右移动板,101、上下移动板,102、前后移动板,11、单轴直线模组,110、左右板,12、u型夹头,13、夹持壳,14、光纤接头。
具体实施方式
25.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施例的限制。
26.本实用新型的目的是提供一种带双机械手的12芯智慧光纤配线架,通过设置在壳体内的第一机械手和第二机械手完成光纤的拔插操作。下面是具体的实施例:
27.实施例1:
28.本实用新型一种带双机械手的12芯智慧光纤配线架,包括壳体1、架体、第一机械手、第二机械手和若干个输入光纤6、输出光纤7、第一对接头8、第二对接头9、光纤接头14。
29.架体设置在壳体1内。架体包括支架2、第一横向支板3、第二横向支板4和第三横向支板5。光纤接头14设置在壳体1的一侧,用于与外部的光纤连接,如图1所示。光纤接头14采
用现有的即可。
30.第一横向支板3、第二横向支板4和第三横向支板5均设置在支架上。
31.第一横向支板3、第二横向支板4、第三横向支板5均互相平行,且第二横向支板4和第三横向支板5分别位于第一横向支板3的两侧;第二横向支板4位于第一横向支板3的下方,如图3所示。
32.输入光纤6、输出光纤7和第一对接头8的数量相同,输入光纤6、输出光纤7和第一对接头8的数量为12。输入光纤6的两端及输出光纤7的两端分别设置光纤插头。
33.将12个第一对接头8等间距的设置在第一横向支板3上,为方便查找,分别标号为1-12。优选的,第一横向支板3设置若干个凹槽;第一对接头8设置在凹槽内。第一对接头8为光纤对接头,光纤对接头采用现有的即可,目的是使输入光纤6与输出光纤7对接,如图2所示。
34.输入光纤6一端的光纤插头插接在第一对接头8的一端,另一端的光纤插头插接在壳体1上的光纤接头14上。输出光纤7一端的光纤插头插接在第一对接头8的另一端,另一端的光纤插头同样插接在壳体1上的光纤接头14上。光纤接头14的数量为24个,两两的一组,对应于一个输入光纤6或输出光纤7。
35.第一机械手设置在架体的第二横向支板4上。
36.第一机械手包括夹持件和三轴直线模组10。夹持件设置在三轴直线模组10上,使夹持件可以左右、前后、上下移动。夹持件是用来夹持输入光纤6插接在第一对接头上8的光纤插头的。
37.三轴直线模组10包括x轴直线模组、y轴直线模组、z轴直线模组。其中,x轴直线模组、y轴直线模组、z轴直线模组的结构相同,不同的是,x轴直线模组用于左右移动,y轴直线模组用于前后移动,z轴直线模组用于上下移动,如图4所示。
38.x轴直线模组设置在第二横向支板4上,z轴直线模组设置在x轴直线模组的左右移动板100,y轴直线模组设置在z轴直线模组的上下移动板101,夹持件设置在y轴直线模组的前后移动板102上。
39.第二机械手包括插接件和使插接件左右移动的单轴直线模组11。
40.单轴直线模组11设置在第三横向支板5上;插接件位于第一对接头8的上方;插接件包括支撑体,第二对接头9设置在支撑体上的。支撑体设置在单轴直线模组11的左右板110上,带动插接件左右移动。
41.在本实施例中,第二对接头9设置2个,平行布置在支撑体上。第一对接头8、第二对接头9的结构相同,均为光纤对接头。插接件是为了使输入光纤6临时插接的,方便进行对输入光纤7进行移位。
42.三轴直线模组10、单轴直线模组11均为常用的移动组件,采用现有的即可,如采用丝杆-螺母的组合,或者采用齿形带的传送方式,本实用新型不再过多叙述。
43.夹持件设置在前后移动板102上。夹持件包括u型夹头12和连接板;u型夹头12通过连接板竖直设置在前后移动板102上。u型夹头12用于将插接在第一对接头8上的输入光纤6取下,并将其插接在插接件上或者将插接件上的输入光纤6取下,插接在第一对接头8上,如图5所示。对应的,输入光纤6插接在第一对接头8的那一端的光纤插头上套设与u型夹头12配合的夹持壳13;夹持壳13前端和后端设置挡板,使u型夹头12可以在从下向上移动过程
中,插入到夹持壳13的挡板之间。优选的,还可以在u型夹头12的内底侧设置一磁铁,夹持壳13采用铁或其他可以被磁铁吸附的材料,这样在u型夹头12插入夹持壳13的挡板之间时,夹持壳13可以被u型夹头12吸附保证夹持的更加牢靠。
44.使用时,将u型夹头12插入夹持壳13,使u型夹头12的前后均被夹持壳13的挡板挡住,这样当u型夹头12前后移动时,即可将输入光纤6的光纤插头拔出或插入。
45.第一机械手执行的是将输入光纤6从第一对接头8拔出和插入,然后将输入光纤6暂时插接在第二机械手的第二对接头9上。第二对接头9设置两个的目的,是确保两个输入光纤6能互换位置,或者进行多方的输入光纤6的位置的调整。
46.为了便于管理,可以在第一对接头和夹持壳上分别设置标号。
47.具体实用过程如下:
48.初始状态下:第一对接头8从左至右的标号为1-12;夹持壳13从左至右的标号为1-12;即标号相同的输入光纤6与标号相同的第一对接头8连通(标号为1的输入光纤插接在标号为1的第一对接头8上)。
49.当需要将标号为1的输入光纤6插接在标号为5的第一对接头8上,标号为5的输入光纤6插接在标号为1的第一对接头8上时。
50.第二机械手控制插接件移动至标号为1的输入光纤6的上方,第一机械手使夹持件移动到与标号为1的输入光纤6的左右方向上一致,然后使夹持件向前移动,使夹持件的u型夹头12运动到夹持壳13的正下方,然后夹持件向上运动,夹持件恰好插入到夹持壳13的前后挡板之间,然后夹持件向后运动即可将标号为1的输入光纤6拔出。控制夹持件向上运动至与插接件高度相同,左右移动至对准一个第二对接头9,夹持件向前运动,将标号为1的输入光纤6插入至插接件的其中一个第二对接头9中,完成将标号为1的输入光纤6暂存在第二对接头9。夹持件回原位。(如果第一横向支板3及上面的输入光纤6影响夹持件的运动,可以通过第一机械手、第二机械手进行位置调整)。
51.第一机械手、第二机械手进行左右移动至标号为5的输入光纤6处,第一机械手将夹持件运动至标号为5的输入光纤6,控制u型夹头12将标号为5的输入光纤6拔出,插入到第二机械手的另一个第二插接件9中,然后将标号为1的输入光纤6从第二机械手的第二对接头9上拔下,插入到标号为5的第一对接头8,再移动到标号为1的第一对接头8处,通过第一机械手将标号为5的输入光纤6插入到标号为1的第一对接头8处。
52.实施例2:
53.在实施例1的基础上,本实施例还包括控制单元,控制单元用于控制第一机械手和第二机械手运动。控制单元根据操作指令信息,控制第一机械手和第二机械手动作,进行输入光纤6的拔插操作。控制单元还通过网络连接远程控制器,接收远程控制器通过网络发来的操作指令信息,以便实现远距离的操控。使用者不用再去到带双机械手的12芯智慧光纤配线架所在地,即可远程控制进行输入光纤6位置的调换。控制单元为现有技术,采用现有的即可,不再详细叙述。
54.壳体1上设置透明观察窗;壳体1上设置扶手,壳体1的底端还设置支脚。
55.显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。